Изобретение относится к электро- ; технике и может быть использовано для привода различных маховиковых производственных механизмов.
Целью изобретения является повьше- ние быстродействия.
На фиг, 1 показана структурная схема электропривода; на фиг. 2 - структурная схема формирователя импульсов управления инвертором; на фиг. 3 - механические характеристики электродвигателя; на фиг. А - характеристика аппроксиматора.
Электропривод кузнечного пресса (фиг. 1) содержит асинхронньй электродвигатель 1 с фазным ротором, выпрямитель 2 в цепи ротора, в цепь выпрямленного тока которого включены последовательно соединенные дроссель 3, однофазный тиристорный мостовой инвертор 4 и датчик 5 тока, параллельно соединенные конденсатор 6 и резистор 7, подключенные к выходу .однофазного тиристорного мостового . инвертора А, датчик 8 частоты вращения, выход которого соединен с первым входом сумматора 9, второй вход которого подключен к выходу датчика 5 тока, а третий вход предназначен для подачи сигнала задания, ап- проксиматор 10, вход которого соединен с выходом сумматора 9, а выход : подгсгаочен к входу формирО1зателя 11 импульсов управления инвертором, выходы которого соединены с управляющими цепями соответствующих тиристоров однофазного мостового инвертора 4..
Формирователь 11 импульсов управления инвертором (фиг. 2) выполнен в виде последовательно соединенных линейного преобразователя 12 напряжения в частоту разнополярных импульсов. Селектора 13 импульсов с двумя выходами и двухканального усилите- ля l4. Вход линейного преобразователя 12 напряжения в частоту образует вход формирователя 11 импульсов уп равления инвертором, первый выход двухканального усилителя 14 образует первый и третий выходы формирователя 11 импульсов управления инвертором, второй и четвертый выходы которого образованы вторым выходом двухканального усилителя 14
Структура электропривода обеспечивает угол наклона искусственной механической характеристики, равный 90 J,
14607672
и разгон двигателя 1 по ней. с постоянным динамическим моментом. Это обусловлено постоянным отношением ЭДС ротора к сопротивлению нагрузки мостового однофазного инвертора 4, так как ЭДС и сопротивление изменяются от частоты инвертирования выпрямленного тока ротора по тождественньм 10 нелинейным-зависимостям. В результате этого уменьшается время восстановления кинематической энергии маховика после операции штамповки.
Эквивалентное сопротивление на- 15 грузки инвертора 4, вводимое в цепь ротора, опр1: 4еляется выражением
R
T+2 irf цТц
где R - сопротивление резистора; 20 f U частота инвертирования вьшрям- ленного тока ротора;
(О
const
(3)
- постоянная времени контура нагрузки инвертора; С - емкость конденсатора. 25 Тождественная зависимость изменения ЭДС ротора определяется выражением
rU2«uf;
30 где EJ - выпрямленное значение ЭДС ротора при заторможенном двигателе и разомкнутых кольцах.
Момент и ток двигателя для данного режима работы определяются выражением,
M.ij.f-.E
где Ij - .выпрямленное значение тока ротора.
Для соблюдения зависимостей (1) - (3) изменение часто ы инвертирования выпрямленного тока ротора от частоты вращения двигателя производится обратно пропорционально изменению ЭДС ротора от частоты инвертирования по заданной кривой, построенной по выражению (2), с учетом зависимости ЭДС ротора от частоты вращения.
Электропривод работает следующим образом.,
При включении напряжения питания на вход аппроксиматора 10 поступает анапоговый сигнал ,11,. , равный сигна-г лу задания U. В соответствии с ку- сочно-линейной характеристикой аппроксиматора 10 (фиг. 4) он аппроксимирует кривую 15, представляющую собой равностороннюю гиперболу с осями
35
40
45
50
55
(О
const
(3)
- постоянная времени контура нагрузки инвертора; С - емкость конденсатора. 5 Тождественная зависимость изменения ЭДС ротора определяется выражением
rU2«uf;
0 где EJ - выпрямленное значение ЭДС ротора при заторможенном двигателе и разомкнутых кольцах.
Момент и ток двигателя для данного режима работы определяются выражением,
M.ij.f-.E
где Ij - .выпрямленное значение тока ротора.
Для соблюдения зависимостей (1) - (3) изменение часто ы инвертирования выпрямленного тока ротора от частоты вращения двигателя производится обратно пропорционально изменению ЭДС ротора от частоты инвертирования по заданной кривой, построенной по выражению (2), с учетом зависимости ЭДС ротора от частоты вращения.
Электропривод работает следующим образом.,
При включении напряжения питания на вход аппроксиматора 10 поступает анапоговый сигнал ,11,. , равный сигна-г лу задания U. В соответствии с ку- сочно-линейной характеристикой аппроксиматора 10 (фиг. 4) он аппроксимирует кривую 15, представляющую собой равностороннюю гиперболу с осями
5
0
5
0
5
координат U и U. , которая построена ПО выражению (2) с первоначальными осями координат f. и EJ. Поэтому с выхода аппроксиматора 10 на вход преобразователя 12 напряжения в частоту поступает аналоговый сигнал , , пропорциональный ЭДС ротора Е. Преобразователь 12 формирует на входе селектора 13 разнополярные импульсы
с частотой f
HI. .
обратно пропорциональной сигналу Uj. Селектор 13 разделяет эти сигналы на положительные и отрицательные импульсы и подает их соответственно на двухканальный вход 15 усилителя 14. Усиленные по току, импульсные сигналы с выходов усилителя 14 поочередно поступают на управляющие цепи соответствующих тиристоров инвертора 4, При замыкании инвер-20 тором 4 цепи ротора срабатывает отсечка по току двигателя, образованная отрицательной обратной связью, в состав которой входит датчик 5 тока. На вход аппроксиматора 10 поступает 25 сигнал Ujjj , равный разности напряжений и и -Uf датчика 5 тока. С выхода аппроксиматора 10 на вход форми- рователя 11 импульсов управления поступает сигнал и/2 что. приводит к ЗО изменению частоты инвертирования мостового однофазного инвертора 4 до и значения ц2 результате этого двигатель начинает разгоняться с полным сопротивлением резистора 7 в цепи ротора, потому что при минимальной- частоте ,ц, инвертирования реактивное сопротивление конденсатора 6 имеет, наибольшее значение и практически
При выходе двигателя 1 на естественную характеристику 17 частота инвертирования достигает значения f , при котором реактивное сопротивление конденсатора 6 имеет наименьшее значение и практически весь ток ротора проходит через неГо; Пуск двигателя закончится при достижении им частоты (j2f вращения холостого хода. Частота f, инвертирования в этом режиме
Ил
имеет максимально возможное значение, а напряжение , подаваемое на вход аппроксиматора 10, имеет минимально возможное значение.
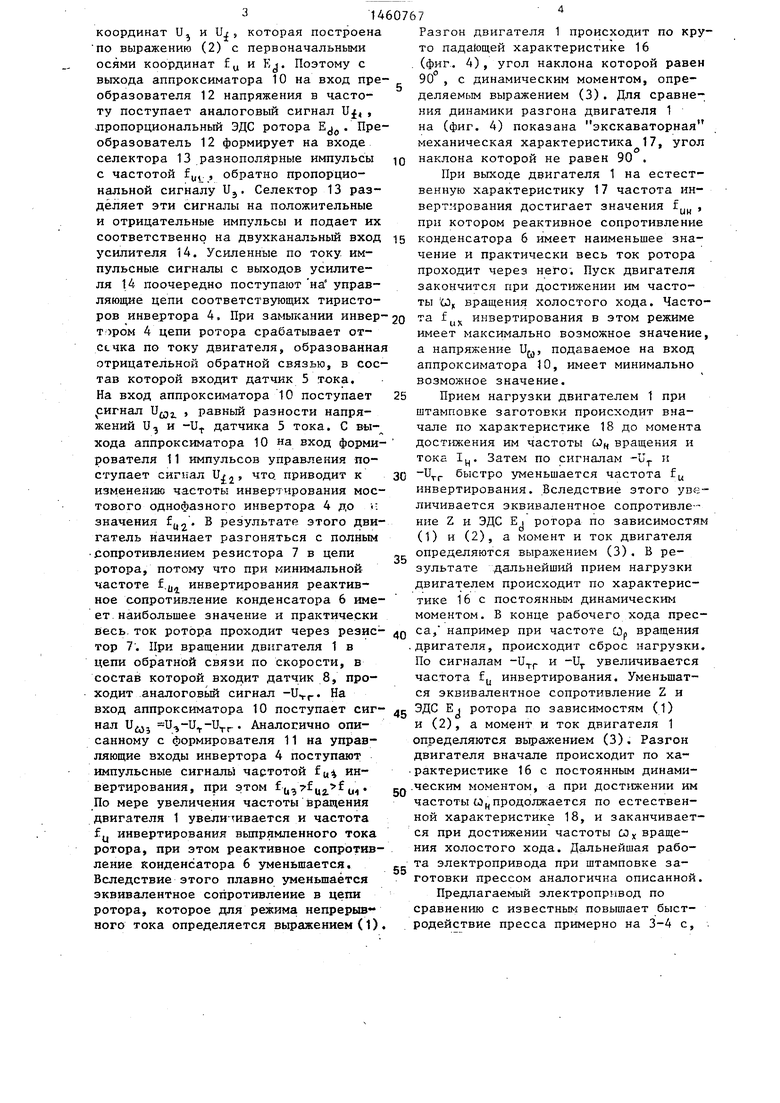
Прием нагрузки двигателем 1 при штамповке заготовки происходит вначале по характеристике 18 до момента достижения им частоты (ц вращения и тока 1ц. Затем по сигналам -U и быстро уменьшается частота
35
инвертирования. Вследствие этого увеличивается эквивалентное сопротивление Z и ЭДС El ротора по зависимостям (1) и (2), а момент и ток двигателя определяются выражением (3). В результате дальнейший прием нагрузки двигателем происходит по характеристике 16 с постоянным динамическим моментом. В конце рабочего хода прес- весь. ток ротора проходит через резне- о - например при частоте Ор вращения тор 7. При вращении двигателя 1 в .двигателя, происходит сброс нагрузки. цепи обратной связи по скорости, в По сигналам -Ь и -U увеличивается состав которой входит датчик 8, про- частота f инвертирования. Уменьшат- ходит аналоговый сигнал -U. На ся эквивалентное сопротивление Z н вход аппроксиматора 10 поступает сиг- g ЭДС Е ротора по зависимостям (1) нал и., Аналогично спи- и (2), а момент и ток двигателя 1
определяются выражением (3). Разгон двигателя вначале происходит по ха- .рактеристике 16 с постоянным динами- g« .ческим моментом, а при достижении им частоты Q продолжается по естественной характеристике 18, и заканчиваетсанному с формирователя 11 на управляющие входы инвертора 4 поступают импульсные сигналь частотой f ц инвертирования, при этом f По мере увеличения частоты вращения двигателя 1 увели швается и частота fy инвертирования вьшрямленного тока ротора, при этом реактивное сопротивление конденсатора 6 уменьшается. Вследствие этого плавно уменьшается эквивалентное сопротивление в цепи ротора, которое для режима непрерыв ного тока определяется вьфажением (1) .
55
ся при достижении частоты со вращения холостого хода. Дальнейшая работа электропривода при штамповке заготовки прессом аналогична описанной.
Предлагаемый электропривод по сравнению с известныь-; повышает быстродействие пресса примерно на 3-4 с.
Разгон двигателя 1 происходит по круто пада1ощей характеристике 16 (фиг. 4), угол наклона которой равен
90
с динамическим моментом, опре
деляемым выражением (3). Для сравнения динамики разгона двигателя 1 на (фиг. 4) показана экскаваторная механическая характеристика 17, угол наклона которой не равен 90 .
При выходе двигателя 1 на естественную характеристику 17 частота инвертирования достигает значения f , при котором реактивное сопротивление конденсатора 6 имеет наименьшее значение и практически весь ток ротора проходит через неГо; Пуск двигателя закончится при достижении им частоты (j2f вращения холостого хода. Частота f, инвертирования в этом режиме
Ил
имеет максимально возможное значение, а напряжение , подаваемое на вход аппроксиматора 10, имеет минимально возможное значение.
Прием нагрузки двигателем 1 при штамповке заготовки происходит вначале по характеристике 18 до момента достижения им частоты (ц вращения и тока 1ц. Затем по сигналам -U и быстро уменьшается частота
15 20 25 ЗО
35
о . g
55
ся при достижении частоты со вращения холостого хода. Дальнейшая работа электропривода при штамповке заготовки прессом аналогична описанной.
Предлагаемый электропривод по сравнению с известныь-; повышает быстродействие пресса примерно на 3-4 с.
1460767
что приводит к уменьшению времени технологического цикла штамповки в среднем на 27%.
.5
Формулаизобретения
1. Электропривод кузнечного пресса, содержащий асинхронньй электродвигатель с фазным ротором, выпрями- ю тель в цепи ротора, в цепь выпрямленного тока которого включены последовательно соединенные дроссель, однофазный тиристорный мостовой инвертор и датчик тока, параллельно соединен- гБ ные конденсатор и резистор, подключенные к выходу однофазного мостового тиристорного инвертора, датчик частоты вращения, выход которого соединофазного мостового инвертора, от личающийся тем, что, с це лью повьшения быстродействия, в нег введен аппроксиматор, вход которого соединен с выходом сумматора, а вых аппроксиматора соединен с входом фо мирователя импульсов управления инвертором.
2. Электропривод по п. 1, отл чающийся тем, что формирова тель импульсов управления инверторо рыполнен в виде последовательно сое ненных линейного преобразователя напряжения в частоту разнополярных импульсов, селектора импульсов с дв мя выходами и двухканального усили ля, вход линейного преобразователя напряжения в частоту образует вход
ТиТЫ врС11ЦСШГ1Л , ixv «г-1 -
иен с первым-входом сумматора, второй 2о оР«иРозателя импульсов управления
вход которого подключен к выходу датчика тока, а третий вход сумматора предназначен для подачи сигнала задания, формирователь импульсов управления инвертором с четырьмя выходами, соединеннными с управляющими цепями соответствующих тиристоров одинвертором, первый выход двухканаль ного усилителя образует первый и третий выходы фор ирователя импуль сов управления инвертором, второй 25 четвертый выходы которого образова вторым выходом двухканального усилителя.
6
7
нофазного мостового инвертора, отличающийся тем, что, с целью повьшения быстродействия, в него введен аппроксиматор, вход которого соединен с выходом сумматора, а выход аппроксиматора соединен с входом формирователя импульсов управления инвертором.
2. Электропривод по п. 1, отличающийся тем, что формирователь импульсов управления инвертором рыполнен в виде последовательно соединенных линейного преобразователя напряжения в частоту разнополярных импульсов, селектора импульсов с двумя выходами и двухканального усилителя, вход линейного преобразователя напряжения в частоту образует вход
о оР«иРозателя импульсов управления
инвертором, первый выход двухканального усилителя образует первый и третий выходы фор ирователя импульсов управления инвертором, второй и 25 четвертый выходы которого образованы вторым выходом двухканального усилителя.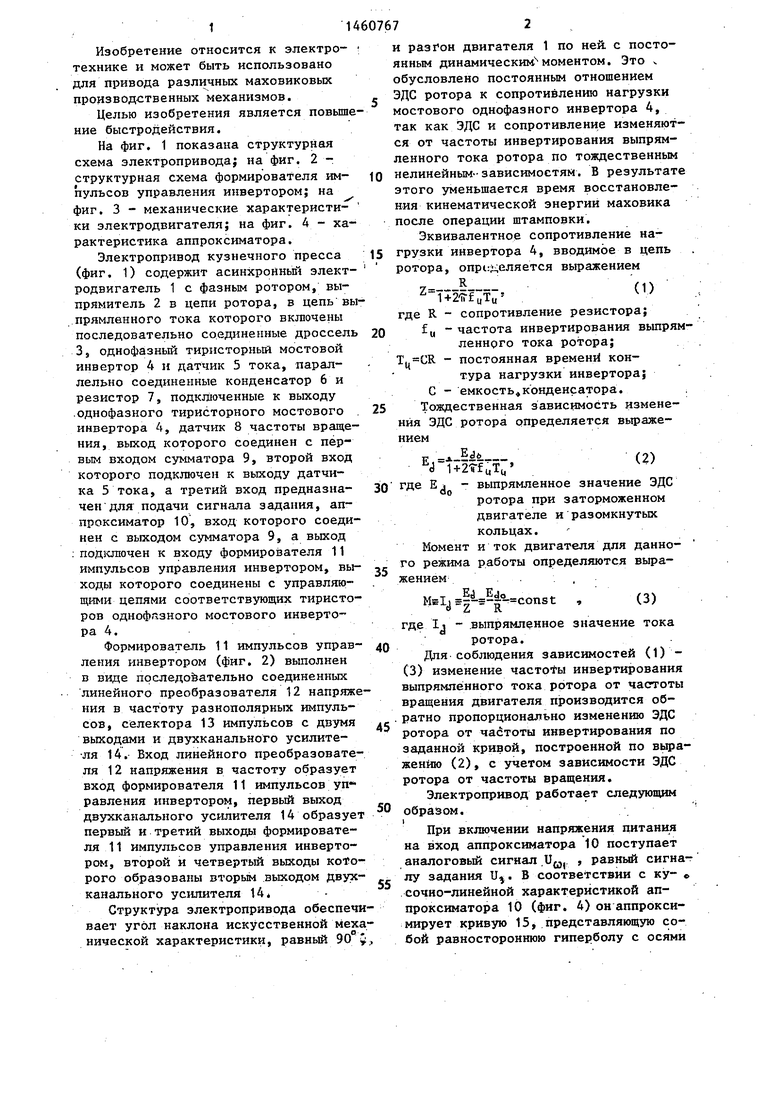

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод кузнечного пресса | 1985 |
|
SU1295500A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2361357C2 |
| Устройство для управления вентильнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU822312A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2160495C2 |
| Электропривод переменного тока | 1979 |
|
SU900396A1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1181110A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| Вентильный преобразователь,ведомый сетью | 1979 |
|
SU1005252A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
Изобретение относится к электротехнике и может быть использовано для привода различных маховиковых производственных механизмов. Целью, изобретения является повышение быстродействия. Электропривод содержит асинхронный электродвигатель 1 с фазным ротором, выпрямитель 2, дроссель 3, мостовой инвертор 4, датчик тока 5, конденсатор 6 и резистор 7, подключен- ные к выходу инвертора 4,. дат- чик 8 частоты вращения,.сумматор 9, аппроксиматор 10 и формирователь 11 импульсов управления инвертором. За счет введения в состав электропривода кузнечного пресса аппроксимато- ра 10 и выполнения формирователя 11 импульсов в виде последовательно соединенных линейного преобразователя напряжения в частоту, селектора импульсов с двумя выходами и двухка- нального усилителя обеспечивается угол наклона искусственной механической характеристики, равньй 90 , и разгон двигателя с постоянным динамическим моментом, что обусловлено постоянством отношения ЭДС ротора к сопротивлению нагрузки инвертора 4,. которые изменяются от частоты по тождественным нелинейным зависимостям. 1 з.п ф-лы, 4 ил. cv (Л ся о О5 .Фм.1 i
.2
)
If.ff
Jf
Фиг.
и« М
18
| Устройство для регулирования скорости вращения асинхронного электродвигаиеля | 1975 |
|
SU610279A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Гасанов З.А | |||
| Исследование замкнутой системы автоматического управле- ния асинхронного электропривода с частотно-управляемым сопротивлением в цепи-ротора | |||
| Известия ВУЗов | |||
| - Электромеханика, 1986, № 6, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
