жений (2) - (4) записать в виде
Р К „ К„+Рр.Кц , или
P FH+FP.
на трансформаторе Тр1 и двух дополнительных симисторах.
Таким образом, на электродвигатель подается напряжение, действующее зна

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки нити | 1988 |
|
SU1560456A1 |
| Устройство для намотки нити | 1987 |
|
SU1519989A1 |
| Устройство для наматывания нити на бобину | 1987 |
|
SU1444261A1 |
| Устройство для регулирования натяжения нити | 1989 |
|
SU1706949A1 |
| Устройство для намотки нити на бобину | 1991 |
|
SU1770245A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАКОПИТЕЛЕМ УТОЧНОЙ НИТИ | 2001 |
|
RU2206489C1 |
| Устройство для намотки нити | 1987 |
|
SU1461735A1 |
| Устройство для намотки нитевидного материала | 1986 |
|
SU1335524A1 |
| Устройство для управления намоткой нити | 1987 |
|
SU1532495A1 |
| Устройство для намотки нитевидного материала | 1989 |
|
SU1632910A1 |
Изобретение относится к текстильной промышленности и касается конструкции устройства для намотки нити. Цель изобретения - повышение качества намотки. Бобинодержатель 8 связан с приводным двигателем 1 через дифференциал. Момент на бобинодержа- теле поддерживается равным моменту на рычаге 12, закрепленном на солнечном колесе дифференциала. Блок управления обеспечивает удержание рычага 12 в положении, при котором центр тяжести груза 13 располагается на расстоянии от оси рычага, равном радиусу намотки, что обеспечивает постоянство натяжения нити в процессе намотки. 1 з.п. ф-лы, 5 ил.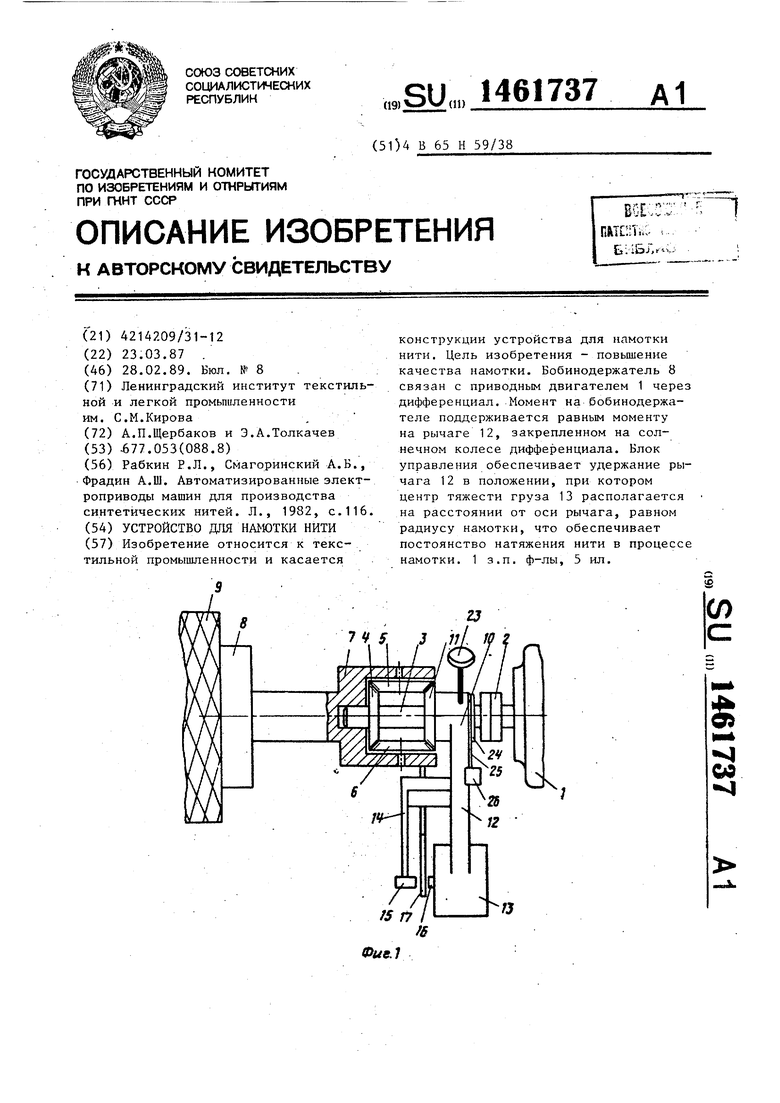
зов, один из которых компенсирует (и определяет) F, а второй Р компенсирует момент на вращение прикаточного ролика, можно записать
р PI+РО FH+FP .
35
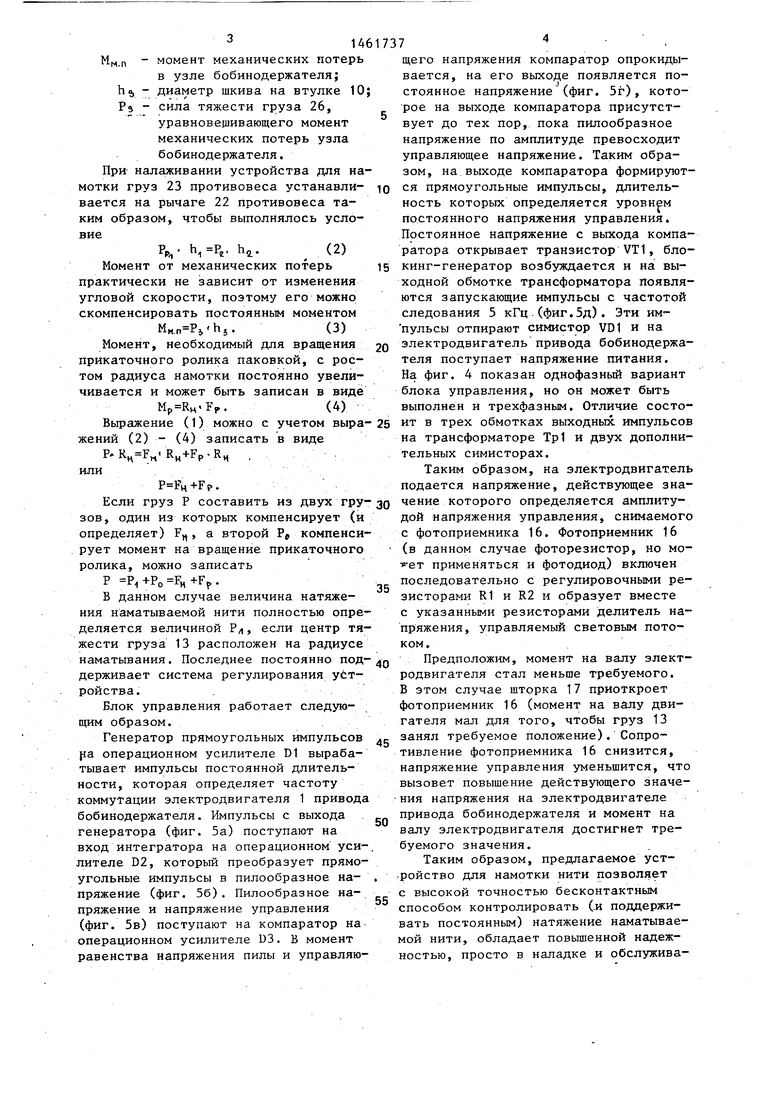
Если груз Р составить из двух гру-зо чение которого определяется амплитудой напряжения управления, снимаемого с фотоприемника 16. Фотоприемник 16 (в данном случае фоторезистор, но мо- применяться и фотодиод) включен последовательно с регулировочными резисторами R1 и R2 и образует вместе с указанными резисторами делитель напряжения, управляемый световым потоком.
Предположим, момент на валу электродвигателя стал меньше требуемого. В этом случае шторка 17 приоткроет фотоприемник 16 (момент на валу двигателя мал для того, чтобы груз 13 занял требуемое положение). Сопротивление фотоприемника 16 снизится, напряжение управления уменьшится, что вызовет повышение действующего значения напряжения на электродвигателе привода бобинодержателя и момент на валу электродвигателя достигнет требуемого значения.
Таким образом, предлагаемое уст- , .ройство для намотки нити позволяет с высокой точностью бесконтактным способом контролировать (.и поддерживать постоянным) натяжение наматываемой нити, обладает повышенной надежностью, просто в наладке и обслужива45
В данном случае величина натяжения наматываемой нити полностью определяется величиной РЛ, если центр тяжести груза 13 расположен на радиусе наматывания. Последнее постоянно под- Q держивает система регулирования устройства.
Блок управления работает следующим образом.
Генератор прямоугольных импульсов ра операционном усилителе D1 вырабатывает импульсы постоянной длительности, которая определяет частоту коммутации электродвигателя 1 привода бобинодержателя. Импульсы с выхода генератора (фиг. 5а) поступают на вход интегратора на операционном усилителе D2, который преобразует прямоугольные импульсы в пилообразное напряжение (фиг. 56). Пилообразное напряжение и напряжение управления (фиг. 5в) поступают на компаратор на операционном усилителе D3. В момент равенства напряжения пилы и управляю50
20
If
13
VU9. 2
2f
2
id
-1-{2д
R2
Cf ±
.-J Г J
-сгн15ь-с1 Ri
Фи.Ч
Редактор М.Петрова
Составитель А.Попов
Техред М.Ходанич . Корректор Л.Патай
Заказ 633/18
Тираж 531
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производствеино-издательский комбинат, Патент, г. Ужгород, ул. Гагарина, 101
V О
Г-| I-I
п г
Фив. 5
Подписное
х
| Рабкин Р.Л., Смагоринский А.Б., Фрадин А.Ш | |||
| Автоматизированные электроприводы машин для производства синтетических нитей | |||
| Л., 1982, с.116. |
