/7
g
(Л
ел
00
о
Изобретение относится к текстильной промышленности, касается устройств для намотки нити на цилиндрическую бобину и может быть использо- вано на машинах по производству и переработке химических волокон.
Цель изобретения - упрощение конструкции.
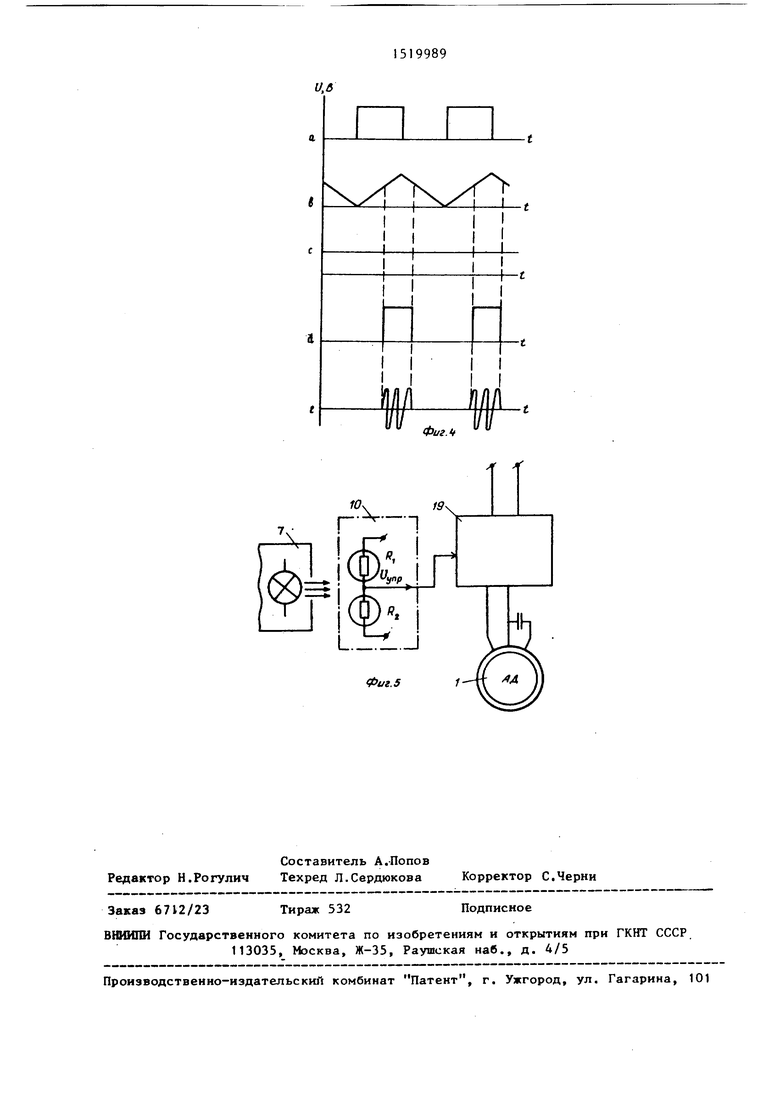
На фиг. 1 показана схема устрой- ства, вид сверху; на фиг. 2 - схема действующих сил; на фиг. 3 - принципиальная схема блока управления; на фиг, 4 - диаграммы, поясняющие принцип действия блока управления; на фиг. 5 - схема функциональных связей блока управления с элементами намоточного устройства.
Вал приводного электродвигателя 1 через соединительную муфту 2 жестко связан с дифференциалом, на валу 3 которого жестко закреплено солнечное колесо 4 и свободно установлено второе солнечное колесо 5. Последнее жестко соединено с втулкой 6, выполнен- ной как единое целое с весовым рычагом 7, на котором свободно установлен груз 8 и закреплен груз 9. На наружной поверхности груза вьшолкен паз 10. Сателлиты 11 и 12 дифференци- ала закреплены на водила 13, жестко связанном с бобииодержателем 14, на котором установлена бобина (паковка) 15. С последней контактирует прика- точньй ролик 16, установленный на каретке 17, где закреплен поводок 18 конец которого размещен в пазу 10
груза 8,
Датчик 19 положения рычага связан с блоком управления, состояпшм из (фиг, 3) генератора прямоугольных импульсов на микросхеме DI, формирователя пилообразного напряжения (интегратора) на микросхеме D2, компаратора на микросхеме D3, генерато- ра запускающих импульсов (блокинг-ге нератора) на трансформаторе и транзисторе VT1 и силового ключа на си- мисторе VD1.
Устройство работает следуюощм об- разом.
При вращении вала приводаюго электродвигателя 1 вращается вал 3 с солнечным колесом 4, которое приводит в вращение сателлиты И и 12, щиеся вокруг своих осей и вместе с водилом 13, в котором они закреплены. От сателлитов 11 и 12 к солнечному колесу 5 передается крутящий момент, равный моменту на колесе 4, но противоположный по направлению. Крутящий момент, передаваем от. сателлитов к водилу 13, вызывает вращение бобинодержателя с патроном, а момент передаваекый на колесо 5, уравновешивается грузами 8 и 9. Рычаг 7 взаимодействует с датчиком 19, и при отклонении рлтага от горизонтального положения на вьпсоде датчика возникает сигнал рассогласования, поступающий на вход регулятора. Выходной сигнал с регулятора подается на двигатель, чем обеспечивается восстановление горизонтального положения рычага 7. Поводок 18, установленный на каретке 17, фиксирует положение основнго груза 8 на рычаге 7 так, чтобы центр тяжести груза постоянно находился на линии контакта паковки и пр каточного ролика, т.е. на радиусе намотки. Таким образом, момент от каретки 8 на рычаге 7 постоянно компенсирует момент на паковке 15 от натяжения наматываемой нити Г„ . Для компенсации механических потерь в узле бобинодержателя (потерь на вращение прикаточного ролика, потерь в подшипниках узла и т.д.) имеется копенсатор механических потерь (груз) 9. Его положение на каждом механизме подбирается индивидуально, так как величина указанных потерь у различных механизмов различна. Величина силы тяжести основного груза 8 определяет натяжение наматываемой нити (фиг. 2). По условию равновесия моментов в режиме установившегося движения можно записать (фиг. 2) Мд-Мр, где МА - момент, приложенный к ведущему солнечному колесу 4; Мр - момент, приложенный к солнечному колесу 5.
При этом
Мр-Р, (ЪО)Р(М2),
где PJ - сила тяжести груза 8;
ВО - плечо, на котором действует Р, ;
Р - сила тяжести дополнительного груза 9 и тела рычага 7; AOj - плечо на котором действует
совместная сила тяжести элементов 9 и 7. Отсюда
МА RH,
515
где М - момент механических потерь
в узле боби)юдержателя - величина постоянная; F - сила натяжения нити; R - радиус намотки.
С учетом равенства можно записать Р, (ВО )+Р, (AO)Mj..
Установив груз 9 так, чтобы Р (АО.)М, получают, что Р, (BO)
Поскольку по условию работы устройства постоянно поддерживается нахождение центра тяжести груза 8 на линии контакта прикаточного ролика с паковкой, обеспечивается равенство , а следовательно, Р Р2.
Таким образом, натяжение нити сохраняется постоянным в течение всего цикла намотки.
Работа регулятора поясняется схемами фиг. 4.
Генератор прямоугольных импульсов на микросхеме D1 вырабатывает прямоугольные импульсы (фиг. 5а) со скважностью, равной 2, период следования которых определяет частоту коммутации приводиого электродвигателя I (фиг.1) Прямоугольные импульсы преобразуются интегратором в пилообразные (фиг.4Ь), которые подаются на первьм вход компаратора (на микросхеме D3). На второй вход компаратора подается управляющее напряжение от датчика 19 положения рычага (фиг. Ас). В момент равенства мгновенного значения пилообразного напряжения и напряжения управления компаратор опрокидывается (напряжение на вьлходе компаратора скачкообразно меняет знак). В результате на выходе кo mapaтopa формируется прямоугольный импульс (фиг. 4d), длительность которого определяется величиной управляющего напряжения, поступающего от датчика 19. Прямоугольные импульсы с компаратора подаются на блокинг-генератор (на базу транзистора VT1). Блокинг-генератор на время, равное длительности прямоугольного импульса, переходит в режим генерации остроконечных импульсов с частотой следования последних 5 кГц, которые открывают симистор VD1
96
Таким образом симистор VDl подключает приводной электродвигатель 1 к сети питания (фиг. 4е) на время, определяемое величиной управляющего напряжения, или управляющее напряжение с датчика 19 регулирует вел1гчину действующего значения напряжения на приводном электродвигателе.
Таким образом, в данной схеме используется импульсное параметрическое регулирование приводным асиихрон- ным электродвигателем с повышенным скольжением.
Датчик 19 положения рычага 7 в
данной схеме представляет собой фотоэлектрический преобразователь из двух фоторезисторов R1, R2, образующих делитель напряжения, с которого снимается сигнал управления. На торце рычага 7 установлен источник светового потока.
При отклонении рычага от положения равновесия с делителя напряжения
R1, R2 снимается сигнал .управления, пропорциональный отклонению рычага 7 (один из фоторезисторов оказывается освещен сильнее, а второй наоборот затемняется). Несмотря на то, что в
предлагаемом устройстве использована статическая система регулирования, высокая чувствительность системы (как датчиков, так и регулятора) позволяет стабилизировать угловое положение рычага 7 с высокой точностью.
Формула изобретения
Устройство для намотки нити, со- 4Q держащее бобинодержатель, кинематически связанный с водилом дифференциала, одно солнечное колесо которого соединено с электродвигателем, а другое снабжено рычагом с грузом, прикаточный д5 ролик, установленный на каретке, и блок управления с датчиком положения рычага, отличающееся тем, что, с целью упрощения конструкции, груз на рычаге установлен свободно 50 и имеет паз на наружной поверхности, а каретка снабжена поводком, размещенным в пазу груза.
Фиг.г

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки нити | 1988 |
|
SU1560456A1 |
| Устройство для намотки нити на бобину | 1991 |
|
SU1770245A1 |
| Устройство для наматывания нити на бобину | 1987 |
|
SU1444261A1 |
| Устройство для намотки нити | 1987 |
|
SU1461737A1 |
| Устройство для регулирования натяжения нити | 1989 |
|
SU1706949A1 |
| Бесфрикционное намоточное устройство | 1989 |
|
SU1694470A1 |
| Устройство для намотки нити на бобину | 1981 |
|
SU971768A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ НА БОБИНУ | 1992 |
|
RU2015099C1 |
| "Устройство для намотки нити на бобину | 1977 |
|
SU704877A1 |
| Устройство для намотки нити | 1978 |
|
SU745840A1 |

Изобретение относится к текстильной промышленности и направлено на упрощение конструкции намоточного устройства, обеспечивающего стабильность натяжения нити. Бобинодержатель связан с водилом 13 дифференциала, одно из солнечных колес 4 которого соединено с приводным двигателем 1, а на втором солнечном колесе 5 закреплен рычаг 7 с грузом 8. При намотке паковки каретка 17 с прикаточным роликом 16 перемещает груз 8 по рычагу 7. Положение рычага 7 контролируется датчиком 19, соединенным через регулятор с электродвигателем. 5 ил.
12
ФигЪ
Составитель A.-Попов Редактор Н.Рогулич Техред Л.Сердюкова Корректор С.Черни
Заказ 6712/23
Тираж 532
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
I I I
I I
Фиг. if
Фиг. 5
Подписное
| Устройство для намотки нити | 1987 |
|
SU1461737A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
