Изобретение относится к транспортному машиностроению и может быть использовано при испытаниях транспортных средств,
Цель изобретения - повышение качества оценки работы транспортного средства на различных режимах.
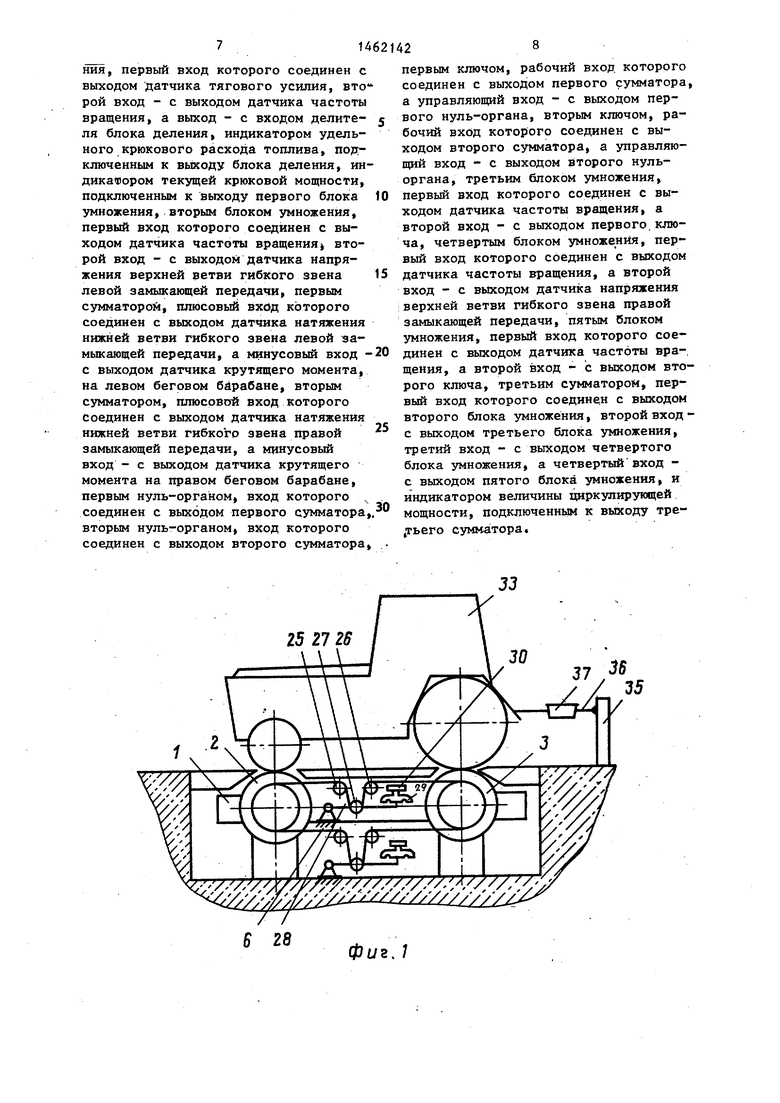
На фиг.1 изображен общий вид стен- да на фиг.2 - структурная схема cтeндa на фиг.З - структурная схема системы обработки сигналов датчиков.
На основании 1 в опорах качения шарнирно установлены левые 2, 3 и правые 4, 5 беговые барабаны, кине- матичёски соединенные по бортам левой
6и правой 7 замыкающими передачами с гибким звеном, например, цепью. Передаточное число левой 6 и правой
7замыкающих передач равно единице. Левый беговой барабан 3 посредством конического редуктора 8 кинематически соединен с входным валом 9 редуктора 10 с переменным передаточным числом. Правый беговой барабан 4 посредством конического редуктора 11 кинематически соединен с входным валом 12 дополнительного редуктора 13 с переменным передаточным числом. Выходные валы 14 и 15 обоих редукторов 10 и 13 с переменным передаточным числом соединены с входными валами суммирующего редуктора 16, на выходном валу 17 которого установлены инерционная масса 18, тормоз 19 и датчик 20 частоты вращения. Левая замыкающая передача 6 снабжена датчиком 21 натяжения верхней ветви гибкого звена и датчиком 22 натяжения нижней ветви гибкого звена. Правая замыкающая пе- редача 7 снабжена датчиком 23 натяжения верхней ветви гибкого звена и датчиком 24 натяжения нижней ветви гибкого звена. Каждый из датчиков натяжения содержит две направляющие 25 и 26 и одну измерительную 27 звездочки. Измерительная звездочка 27 связана с рычагом 28, один конец которого шарнирно установлен на основании 1,
а другой - опирается на мембрану ка- меры 29, полость которой гидравлически соединена с датчиком 30 давления, проградуированным в единицах силы,
На валу левого бегового барабана 3 установлен датчик 31 крутящего момента, а на валу правого бегового барабана 4 - датчик 32 крутящего момен-
5
0
5
0 5
0
та на основе транспортного средства 33 или на основании 1 установлен датчик 34 текущего расхода топлива. Удерживающее устройство содержит опорную стойку 35, закрепленную на основании 1, и тягу 36, связанную посредством датчика 37 с остовом испытываемого транспортного средства 33. Me-f ханизмы переключения (не показаны) редукторов 10 и 13 с переменным передаточным числом кинематически соединены с механизмом поворота, вьтолнен- ным в виде рулевого колена 38 и редуктора 39. На выходном валу редуктора 39 установлен датчик 40 угла по- ворота.
Стенд имеет систему 41 обработки сигналов датчиков, которая содержит первый блок 42 умножения, первый вход
которого соединен с выходом датчика 37 тягового усилителя, второй вход - с выходом датчика 20 частоты враще-г ния, а выход подключен к индикатору 43 текущей крюковой мощности, блок 44
, деления, вкод делителя которого соединен с выходом датчика 34 текущего расхода топлива, вход делимого - .с выходом первого блока 42 умножения, а
.выход подключен к индикатору 45 удель ного крюкового расхода топлива, второй 46, третий 47, четвертый 48, пятый 49 блоки умножения, первые входы которого соединены с выходом датчика 20 частоты вращения, а второй вход второго блока 46 умножения соединен с выходом датчика 21 натяжения верхней ветви гибкого звена левой замыкающей передачи и второй вход четвертого блока 48 умножения соединен с выходом датчика 23 натяжения верхней ветви гибкого звена правой замыкающей передачи первьй сумматор 50, плюсовой вход которого соединен с выходом датчика 22 напряжения нижней ветви гибкого звена левой замыкающей передачи, а минусовый вход - с выходом датчика 31 крутящего момента на левом беговом барабане, второй сз мматрр 51, плюсовый выход которого соединен с выходом датчика 24 натяжения нижней ветви гибкого звена правой замыкающей передачи, а минусовый вход - с выходом датчика 32 кру- . тящего момента на правом беговом барабане, первый нуль-орган 52, вход которого соединен с выходом перйого сумматора 50, второй нуль-орган 53,
:вход которого соединен с выходом второго сумматора 51, первый ключ 54, рабочий вход которого соединен с выни тормозной силы, а остальные колеса работают в тяговом режиме.
Второй режим - режим с циркуляциходом первого сумматора 50, управляю- ей мощности - так же имеет два вида.
,,,,„,Плптэитй Tjwrrr ттмг WTTCTTTMM МПТТТНПРТИ имеет
щий вход - с выходом первого нуль- органа 52, а выход - со вторым входом третьего блока 47 умножения, второй ключ 55, рабочий вход которого соеПервый вид циркуляции мощности имеет место, если задние забегающие и передние ведущие колеса отстающие и работают в тормозном режиме, при этом
динен с выходом второго сумматора 51,10 натягиваются верхние ветви гибких управляющий вход - с выходом второго звеньев замыкающих передач 6 и 7, и
нуль-органа 53, а выход - с вторым входом пятого блока 49 умножения, и третий сумматор 56, первый вход которого соединен с выходом второго блока 46 умножения, второй вход - с выходом третьего блока 47 умножения, третий вход - с выходом четвертого блока 48 умножения, четвертый вход на вых-одах датчиков 21 и 23 появляются сигналы, пропорциональные тормозным силам,
15 Второй вид циркуляции мощности имеет место, если передние забегаю- щие, а задние колеса работают в тормозном режиме, при этом на выходах датчиков 22 и 24 появляются сигналы,
с ВЫХ9Дом пятого блока 49 умножения, 20 пропорциональные силам тяги передних а выход - подключен,к индикатору 57 ведущих колес.
величины циркулирующей мощности.При работе стенда первый блок 42
При испытаниях транспортного сред- умножения обеспечивает перемножение ства 33 на режиме прямолинейного сигналов, поступающих с выхода дат- движения рулевое колесо 38 устанав- 25 чика 37 тягового усилия и датчика 20 ливают в среднее (нулевое) положение, частоты вращения, характеризующего при котором передаточные числа в обо- действительную скорость движения их редукторах 10, 13 будут равны. В транспортного средства. Сигнал с выхода блока 42 умножения поступает на 30 вход индикатора 43 текущей крюковой мощности и на вход дехштеля блока 44 деления, на вход делимого которого поступает сигнал с выхода датчика 34
текущего расхода топлива. С выхода О
ционная масса 18 соответствует посту- 35 блока 44 деления сигнал поступает на пательно движущейся массе транспорт- вход индикатора 45 удельного крюкового расхода топлива.
Первьй 52 и второй 53 нуль-орган выдают напряжение (единица) при по- 40 даче на их входы напряжения отрицательной полярности, а первый 54 и
этом случае левые 2,. 3 и правые 4, 5 беговые барабаны будут вращаться с одинаковой частотой.
При этом, с помощью тормоза 19 будет воспроизводиться нагрузка на крюке транспортного средства, инерного средства, а частота вращения, измеряемая датчиком 20, характеризует действительную скорость движения транспортного средства.
Для имитации режима движения Т1)анспортного средства на повороте пово- второй 55 ключи пропускают напряже- рачивают рулевое колесо 38,, при этом ния, поступающие на рабочие входы в редукторах 10 и 13 посредством ме- щ)и подаче логической единицы на ханизмов переключения устанавливаются 45 их управляющие входы от нуль-оргаиов различные передаточные числа, что 52 и 53. Таким обоазом., на выходах . обеспечивает различные частоты вра- ключей 54, 55 будут формироваться на.
пряжения только при втором виде цир-:
;щения беговых барабанов 3 и 4.
На стенде могут воспроизводиться
.два режима - без циркуляции и с циркуляцией мощности.В режиме без .циркуляции мощности могут иметь место два вида испытаний. Первый вид испытаний воспроизводится в случае, когда все ведущие колеса транспортного г- средства работают в тяговом режиме, а второй вид - в случае, когда одно или несколько колес работает в ведомом режиме, не создавая ни тяговой.
куляции мощности.
CQ При работе без циркуляции мощное- ти сигналы на выходах датчиков 21 и 23 и на выходах второго 46 и четвертого 48 блоков умножения равны нулю, сигналы датчиков 31, .32 больше сигна55, лов датчиков 22 и 24,.поэтому на выходах первого 50 и второго 51 сумма : торов формируется положительный сигнал, на выходах нуль-органов 52 и 53 сигналы равны логическому нулю, клю
тормозной силы, а остальные колеработают в тяговом режиме.
Второй режим - режим с циркуляцией мощности - так же имеет два вида.
Плптэитй Tjwrrr ттмг WTTCTTTMM МПТТТНПРТИ имеет
Первый вид циркуляции мощности имеет место, если задние забегающие и передние ведущие колеса отстающие и работают в тормозном режиме, при этом
куляции мощности.
CQ При работе без циркуляции мощное- ти сигналы на выходах датчиков 21 и 23 и на выходах второго 46 и четвертого 48 блоков умножения равны нулю, сигналы датчиков 31, .32 больше сигна55, лов датчиков 22 и 24,.поэтому на выходах первого 50 и второго 51 сумма : торов формируется положительный сигнал, на выходах нуль-органов 52 и 53 сигналы равны логическому нулю, клю
чи 54 и 55 закрыты, поэтому на их выходах, а также на выходах третьего :47 и пятого 49 блоков умножения сигналы также равны нулю. Поскольку на всех входах третьего сумматора 5.6 сигналы равны нулю, то и на его выходе сигнал будет также равен нулю, i4To будет и отображено на индикаторе 57.
Когда имеет место первый вид циркуляции мощности, сигналы с выходов датчиков 21 и 23 поступают на вторые входы второго 46 и четвертого 48 блоков умножения, на выходах которых формируются сигналы, равные циркулирующей мощности каждого из бортов испытываемого транспортного средства. Сигналы с выходов второго 46 и четвертого 48 блоков умножения поступают соответственнс на первый и третий входы третьего.сумматора 56, с выхода которого сигнал, пропорциональный сумме циркулирующих мощностей в левом и правом бортах транспор тного-средства, поступает на вход , индикатора 57.
В режиме второго вида циркуляции мощности сигналы с выходов датчиков 22 и 24 становятся больше сигналов датчиков 31 и 32, при этом на выхо- дах первого 50 и второго 51 суммато- Гров появляется напряжение отрицательной полярности,. На выходе первого 52 и второго 53 нуль-органов появляется напряжение - логическая единица, которая подается на уп- равляющие входы первого 54 и второго 55 ключей и переводит их в открытое
положение. Напряжения с выходов пер- вого 50 и второго 51 сумматоров поступают на вторые входы третьего 47 и пятого 49 элеь ентоВ умножения, с выхода которых сигналы поступают на второй и четвертый входы третьего
: сумматора 56. На выходе третьего сумматора 56 формируется сигнал, пропорциональный- циркулирующей мощности поступающий на инднкатЬр 57. В этом режиме на выходе датчиков 21 и 23 сигналы равны нулю, пoэтo y-на вы-. ходах второго 46 и четвертого 48
. блоков умножения, а следовательно, и на первом и третьем входах третьего сумматора 56 сигналы также равны ну- лю.
По показаниям индикаторов 45, 43 и 57 определяются зависимости крюко0
0
5
30
35
40 45
SG
55
.
вого расхода топлива от крюковой и циркулирующей мощности.
Благодаря возможности определения мощности, циркулирующей через ходовую систему, и оценке влияния этой мощности на топливную экономичность, повышается качество оценки работы транспортного средства на различных режимах.
Формула изобретения
Стенд для испытания транспортных средств, содержащий основание, левые и правые беговые барабаны, шарнирно установленные на основании и кинематически соединенные по бортам левой и правой замыкающими передачами с передаточным числом, равным единице, и выполненными с гибким звеном, редуктор с переменным передаточным чи слом, входной вал которого кинематически соединен с одним из беговых барабанов одного из бортов, тормоз, датчик частоты вращения, механизм поворота, связанный с механизмом переключения редуктора с переменным передаточным числом, датчик угла поворота, связанный с механизмом поворота, и удерживакяцее устройство, связанное через датчик тягового усилия с основанием и с остовом испытываемого транспортного средства, отличающийся тем, что, с целью повышения качества оценки работы транспортного средства на различных режимах, он снабжен дополнительным редуктором с переменным передаточным числом, входной вал которого кинематически соединен с одним из беговых барабанов другого борта, а механизм :переключения - с механизмом поворота, суммирующим редуктором, входные валы которого кинематически соединены с выходными валами обоих редукторов с передаточным числом, инерционной массой, установленной на выходном валу суммирующего редуктора, связан- - ном с тормозом и с датчиком частоты вращения, датчиками натяжения верхней и нижней ветвей гибких звеньев левой и правой замыкающих передач, датчиками крутящего момента на левом и правом беговьк барабанах, датчиком текущего расхода топлива, блоком деления, вход делителя которого соединен с выходом датчика текущего расхода топлива, первым блоком умноже- i
ния, первый вход которого соединен с выходом датчика тягового усилия, вто рой вход - с выходом датчика частоты вращения, а выход - с входом делите- ля блока деления, индикатором удельного крюкового расхода топлива, подключенным к выходу блока деления, ин дикафором текущей крюковой мощности, подключенным к выходу первого блока умножения, вторым блоком умножения, первый вход которого соединен с выходом датчика частоты вращения второй вход - с выходом датчика напряжения верхней ветви гибкого звена левой замыкающей передачи, первым сумматорой, плюсовый вход которого соединен с выходом датчика натяжения нижней ветви гибкого звена левой замыкающей передачи, а минусовый вход с выходом датчика крутящего момента, на левом беговом барабане, вторым сумматором, плюсовой вход которого соединен с выходом датчика натяжения нижней ветви гибкого звена правой замыкающей передачи, а минусовый вход - с выходом датчика крутящего момента на правом беговом барабане, первым нуль-органом, вход которого соединен с выходом первого сумматора вторым нуль-органом, вход которого соединен с выходом второго сумматора
первым ключом, рабочий вход которого соединен с выходом первого сумматора, а управляющий вход - с выходом первого нуль-органа, вторым ключом, рабочий вход которого соединен с выходом второго сумматора, а управляющий вход - с выходом второго нуль- органа, третьим блоком умножения, первый вход которого соединен с выходом датчика частоты вращения, а второй вход - с выходом первого.ключа, четвертым блоком умножения, первый вход которого соединен с выходом датчика частоты вращения, а второй вход - с выходом датчика напряжения верхней ветви гибкого звена правой замыкающей передачи, пятым блоком умножения, первый вход которого соединен с выходом датчика частоты вра-, щения, а второй вход - с выходом второго ключа, третьим сумматором, первый вход которого соединен с выходом второго блока умножения, второй вход - с выходом третьего блока умножения, третий вход - с выходом четвертого блока умножения, а четвертый вход - с выходом пятого блока умножения, и индикатором величины циркулирующей мощности, подключенным к выходу тре- ,тьего сумматора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяжелонагруженным цепным конвейером | 1979 |
|
SU872401A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2614085C1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Система управления положением объекта | 1987 |
|
SU1409975A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ДВИЖИТЕЛЕЙ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2014 |
|
RU2570847C1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |

Изобретение относится к транспортному машиностроению и может быть использовано при испытаниях транспор тных средств. Цель изобретения - повышение качества оценки работы транfiJ П г, i,| . спортного средства на различных режимах. На основании шарнирно установлены левые 2 и 3 и правые 4 и 5 беговые барабаны, кинематически соединенные по бортам левой 6 и правой 7 цепными передачами, снабженными датчиками 21, 22 и 23, 24 натяжения верхней и нижней ветвей, а также с редукторами 10 и 13, механизмы переключения которых связаны с механизмом 38 поворота. Сигналы датчиков обрабатываются вычислительным устройством 41, KOTOpofe определяет крюковой расход топлива при испытаниях транспорт- ного средства без циркуляции мощности в ходовой системе и с циркуляцией мощности в ходовой системе. 3 ил. i (Л Фиг. 2
фиг. /
Фиг.З
| Стенд для испытания транспортных машин | 1981 |
|
SU983486A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
