Изобретение относится к опорно-поворотным устройствам (далее по тексту - ОПУ), преимущественно к автоматическим системам устройств мобильных установок.
Известно опорно-поворотное устройство для привода антенн, телекамер и т.п. (патент RU 2209495 С1 от 19.06.2002 г.). Согласно описанию ОПУ представляет собой устройство, которое содержит первый поворотный механизм 1 с поворотным узлом 3 и смонтированный на последнем второй поворотный механизм 5 с поворотной платформой 7. Механизмы снабжены приводами поворотного узла 11 и поворотной платформы 12, подключенными посредством проводов 13 и 14 к электрическим соединителям 15 и 16. ОПУ управляется с внешнего автоматизированного рабочего места.
Данное устройство является ближайшим аналогом опорно-поворотного устройства и принимается за прототип.
Работа опорно-поворотного устройства-прототипа осуществляется следующим образом. Управление опорно-поворотным устройством (ОПУ) осуществляется из автоматизированного рабочего места (АРМ) оператора. При этом сигналы управления подаются соответственно на электродвигатель азимутального привода (ЭД-А), расположенный в основании ОПУ (ОСН ОПУ), и на электродвигатель угломестного привода (ЭД-У), расположенный в азимутальной части ОПУ (АЧ ОПУ). При этом электродвигатель азимутального привода (ЭД-А) через редуктор азимутального привода (Р-А) поворачивает азимутальную часть ОПУ (АЧ ОПУ), а электродвигатель угломестного привода (ЭД-У) через редуктор угломестного привода (Р-У) поворачивает угломестную часть ОПУ (УЧ ОПУ) с установленным на ней объектом наведения. Точность наведения объекта наведения на заданный предмет определяется оператором по изображению, получаемому на мониторе автоматизированного рабочего места (АРМ), от камеры, установленной на объекте наведения, либо по величине амплитуды получаемого сигнала с антенны, установленной на объекте наведения.
Недостатками вышеуказанного опорно-поворотного устройства - прототипа являются:
- невозможность точного определения местоположения объекта наведения относительно основания ОПУ, связанная с отсутствием датчиков положения соответственно азимутальной части ОПУ и угломестной части ОПУ;
- недостаточная надежность, связанная с возможностью повреждения конструкции ОПУ и электропривода при наведении в угломестной плоскости при ограничении угла прокачки, связанная с отсутствием концевых датчиков;
- отсутствие возможности дистанционного управления процессом наведения из системы управления объекта применения по заданным угловым координатам;
- недостаточное качество процесса наведения (плавность наведения, поддержание заданной скорости наведения), связанное с отсутствием обратных связей по скорости перемещения объекта наведения;
- невозможность жестко фиксировать азимутальную и угломестную части ОПУ при его транспортировке;
- отсутствие режима стабилизированного удержания объекта наведения в заданном положении при колебаниях основания ОПУ.
Техническими задачами заявляемого изобретения являются:
- обеспечение возможности точного определения местоположения объекта наведения относительно основания ОПУ;
- обеспечение высокой надежности конструкции ОПУ от возможного повреждения при ограничении углов прокачки объекта наведения в угломестной плоскости;
- повышение удобства управления ОПУ с обеспечением возможности ее дистанционного управления (наведения) и автоматизацией выполнения операций;
- повышение качества процесса наведения (плавность наведения, обеспечение заданной скорости наведения);
- повышение надежности конструкции ОПУ при транспортировании;
- обеспечение режима стабилизированного удержания объекта наведения в заданном положении при колебаниях основания ОПУ.
Для решения поставленных задач в известное опорно-поворотное устройство, содержащее автоматизированное рабочее место, основание опорно-поворотного устройства с установленным электродвигателем азимутального привода и редуктором азимутального привода, азимутальную часть опорно-поворотного устройства с установленным электродвигателем угломестного привода и редуктором угломестного привода, угломестную часть опорно-поворотного устройства с жестко установленным на ней объектом наведения, согласно изобретению дополнительно введены:
- станция управления опорно-поворотного устройства (СУ-ОПУ), включающая в себя:
 первый, второй, третий, четвертый, пятый и шестой сумматоры (Σ1-А, Σ2-А, Σ3-У, Σ5-У, Σ5-A, Σ6-У);
первый, второй, третий, четвертый, пятый и шестой сумматоры (Σ1-А, Σ2-А, Σ3-У, Σ5-У, Σ5-A, Σ6-У);
первое и второе интегральное звено (∫1-A, ∫2-У);
первый и второй коммутаторы (SW1-A, SW2-У);
звено коррекции азимутального привода (ЗК-А);
звено коррекции угломестного привода (ЗК-У);
усилитель мощности азимутального привода (УМ-А);
усилитель мощности угломестного привода (УМ-У);
блок обработки информации (БОИ);
- датчики положения азимутального и угломестного приводов (ДП-А и ДП-У);
- концевые выключатели верхнего и нижнего положений угломестного привода (КВУ и КНУ);
- концевые выключатели правого и левого положений азимутального привода (КПА и КЛА);
- азимутальный и угломестный фиксаторы транспортного положения (ФТП-А и ФТП-У);
- датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях (ДУС-У и ДУС-А);
при этом датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях жестко связаны с угломестной частью опорно-поворотного устройства, а датчик абсолютной угловой скорости в азимутальной плоскости электрически связан с первыми входами первого и пятого сумматоров, второй вход первого сумматора электрически связан с выходом автоматизированного рабочего места по заданной скорости наведения в азимутальной плоскости, выход первого сумматора связан с входом первого интегрального звена, выход которого, в свою очередь, связан с первым входом первого коммутатора, второй вход первого коммутатора связан с выходом второго сумматора, первый вход второго сумматора электрически связан с автоматизированным рабочим местом и датчиком положения азимутального привода, установленным на основании опорно-поворотного устройства и кинематически связанным с азимутальной частью опорно-поворотного устройства, второй вход второго сумматора электрически связан с выходом автоматизированного рабочего места по заданному угловому положению в азимутальной плоскости, выход первого коммутатора связан с входом звена коррекции азимутального привода, выход которого электрически связан со вторым входом пятого сумматора, выход которого электрически связан с усилителем мощности азимутального привода, электрически связанного с электродвигателем азимутального привода и вращающим вал электродвигателя азимутального привода, который механически связан с редуктором азимутального привода,
при этом датчик абсолютной угловой скорости в угломестной плоскости электрически связан с первыми входами четвертого и шестого сумматора, второй вход четвертого сумматора электрически связан с выходом автоматизированного рабочего места по заданной скорости наведения в угломестной плоскости, выход четвертого сумматора связан с входом второго интегрального звена, выход которого, в свою очередь, связан с первым входом второго коммутатора, второй вход второго коммутатора связан с выходом третьего сумматора, причем первый вход третьего сумматора электрически связан с автоматизированным рабочим местом и датчиком положения угломестного привода, установленным на азимутальной части опорно-поворотного устройства и кинематически связанным с угломестной частью опорно-поворотного устройства, второй вход третьего сумматора электрически связан с выходом автоматизированного рабочего места по заданному угловому положению в угломестной плоскости, выход второго коммутатора связан с входом звена коррекции угломестного привода, выход которого электрически связан с усилителем мощности угломестного привода, электрически связанного с электродвигателем угломестного привода и вращающего вал электродвигателя угломестного привода, который механически связан с редуктором угломестного привода,
при этом, с одной стороны, первый и второй коммутаторы электрически связаны соответственно с первым и вторым выходами блока обработки информации, который, в свою очередь, электрически связан с входом-выходом автоматизированного рабочего места,
с другой стороны, блок обработки информации электрически связан с азимутальным и угломестным фиксаторами транспортного положения, которые кинематически связаны соответственно с азимутальной и угломестной частями опорно-поворотного устройства,
причем концевые выключатели верхнего и нижнего положения угломестного привода с одной стороны кинематически связаны с угломестной частью опорно-поворотного устройства, а с другой стороны электрически связаны с блоком обработки информации,
в свою очередь, концевые выключатели правого и левого положения азимутального привода с одной стороны кинематически связаны с азимутальной частью опорно-поворотного устройства, а с другой стороны электрически связаны с блоком обработки информации.
Сопоставительный анализ с прототипом показывает, что в заявляемое опорно-поворотное устройство введены новые компоненты, а именно:
- станция управления опорно-поворотного устройства (СУ-ОПУ), включающая в себя:
первый, второй, третий, четвертый, пятый и шестой сумматоры (Σ1-А, Σ2-А, Σ3-У, Σ4-У, Σ5-A, Σ6-У);
первое и второе интегральное звено (∫1-A, ∫2-У);
первый и второй коммутаторы (SW1-A, SW2-У);
звено коррекции азимутального привода (ЗК-А);
звено коррекции угломестного привода (ЗК-У);
усилитель мощности азимутального привода (УМ-А);
усилитель мощности угломестного привода (УМ-У);
блок обработки информации (БОИ);
- датчики положения азимутального и угломестного приводов (ДП-А и ДП-У);
- концевые выключатели верхнего и нижнего положений угломестного привода (КВУ и КНУ);
- концевые выключатели правого и левого положений азимутального привода (КПА и КЛА);
- азимутальный и угломестный фиксаторы транспортного положения (ФТП-А и ФТП-У);
- датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях (ДУС-У и ДУС-А).
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в заявляемое опорно-поворотное устройство (ОПУ) позволяет:
- обеспечить точное определение местоположения объекта наведения относительно основания ОПУ за счет введения датчиков положения соответственно азимутальной части ОПУ и угломестной части ОПУ;
- повысить надежность и исключить возможность повреждения конструкции ОПУ и электроприводов при наведении в угломестной и азимутальной плоскостях при ограничении углов прокачки объекта наведения за счет введения концевых выключателей верхнего и нижнего, правого и левого положения соответственно угломестного и азимутального приводов;
- обеспечить возможность дистанционного управления процессом наведения от системы управления объекта применения по заданным угловым координатам за счет получения в автоматизированном рабочем месте обратных связей по положению объекта наведения с датчиков положения в азимутальной и угломестной плоскостях;
- обеспечить высокое качество процесса наведения (плавность наведения, заданная скорость наведения), связанное с наличием обратных связей по скорости перемещения объекта наведения в азимутальной и угломестной плоскостях;
- обеспечить возможность жестко фиксировать азимутальную и угломестную части ОПУ при транспортировке за счет применения фиксаторов транспортного положения в азимутальной и угломестной плоскостях, что позволяет исключить возможность механической поломки редукторов;
- обеспечить возможность использования режима стабилизированного удержания объекта наведения в заданном положении при колебаниях основания ОПУ за счет использования сигналов с датчиков абсолютной угловой скорости в азимутальной и угломестной плоскостях после обработки их соответствующими интегральными звеньями и звеньями коррекции.
В целом технический результат заключается в значительном повышении эксплуатационных возможностей опорно-поворотного устройства.
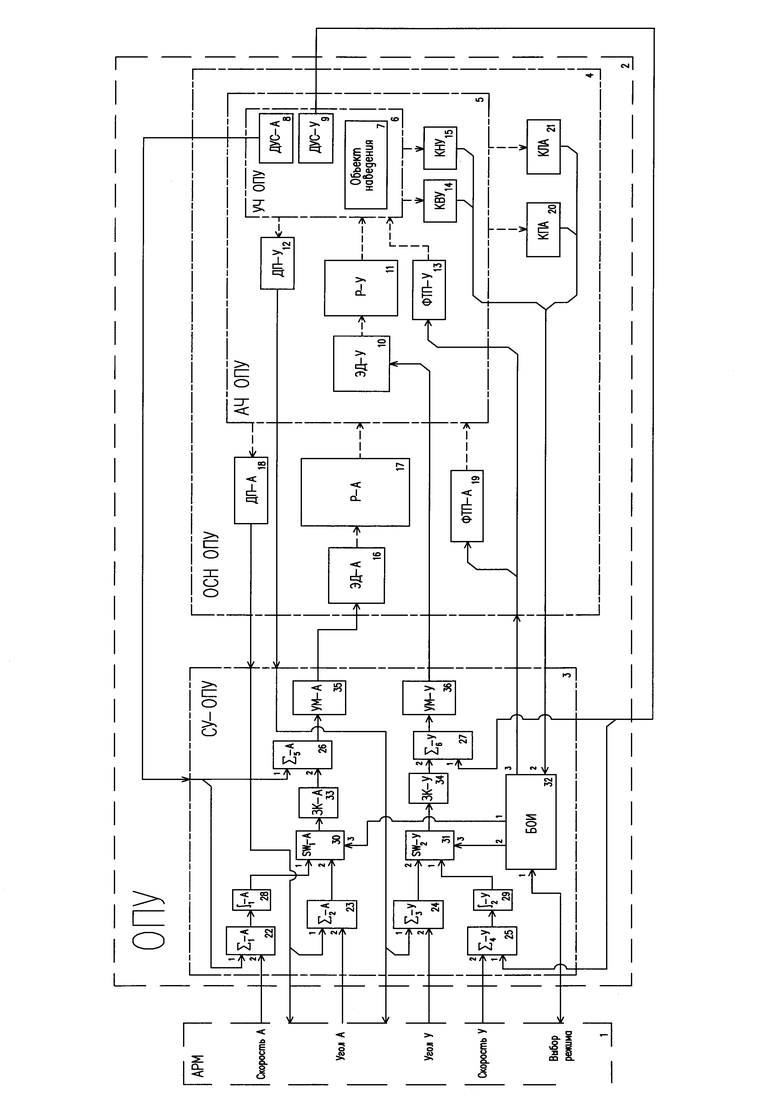
Устройство и работа заявляемого изобретения поясняются графическим материалом, представляющим структурную схему заявляемого опорно-поворотного устройства.
Сокращения, принятые в тексте и на схеме:
АРМ - автоматизированное рабочее место;
АЧ ОПУ - азимутальная часть ОПУ;
БОИ - блок обработки информации;
ДП-А - датчик положения азимутального привода;
ДП-У - датчик положения угломестного привода;
ДУС-А - датчик абсолютной угловой скорости в азимутальной плоскости;
ДУС-У - датчик абсолютной угловой скорости в угломестной плоскости;
ЗК-А - звено коррекции азимутального привода;
ЗК-У - звено коррекции угломестного привода;
КВУ - концевой выключатель верхнего положения угломестного привода;
КНУ - концевой выключатель нижнего положения угломестного привода;
КЛА - концевой выключатель левого положения азимутального привода;
КПА - концевой выключатель правого положения азимутального привода;
ОПУ - опорно-поворотное устройство;
ОСН ОПУ - основание ОПУ;
Р-А - редуктор азимутального привода;
Р-У - редуктор угломестного привода;
Скорость А - заданная с АРМ скорость поворота ОПУ в азимутальной плоскости;
Скорость У - заданная с АРМ скорость поворота ОПУ в угломестной плоскости;
СУ-ОПУ - станция управления ОПУ;
УМ-А - усилитель мощности азимутального привода;
УМ-У - усилитель мощности угломестного привода;
УЧ ОПУ - угломестная часть ОПУ;
Угол А - заданное с АРМ требуемое угловое положение ОПУ в азимутальной плоскости;
ФТП-А - фиксатор транспортного положения азимутального привода;
ФТП-У - фиксатор транспортного положения угломестного привода;
ШИМ - широтно-импульсная модуляция;
ЭД-А - электродвигатель азимутального привода;
ЭД-У - электродвигатель угломестного привода;
Σ1-А, Σ2-А, Σ3-У, Σ4-У, Σ5-A, Σ6-У - первый, второй, третий, четвертый, пятый и шестой сумматоры соответственно азимутального и угломестного приводов;
∫1-A, ∫2-У - первое и второе интегральное звено соответственно азимутального и угломестного приводов;
SW1-A, SW2-У - первый и второй коммутаторы соответственно азимутального и угломестного приводов.
Структурно рабочее место с опорно-поворотным устройством состоит из следующих элементов: автоматизированного рабочего места (АРМ) 1 оператора, опорно-поворотного устройства (ОПУ) 2, станции управления ОПУ (СУ-ОПУ) 3, основания ОПУ (ОСИ ОПУ) 4, азимутальной части ОПУ (AЗ ОПУ) 5, угломестной части ОПУ (УЧ ОПУ) 6 с установленным на ней объектом наведения 7.
На угломестной части ОПУ (УЧ ОПУ) 6 жестко механически установлены датчики абсолютной угловой скорости в азимутальной плоскости (ДУС-А) 8 и угломестной плоскости (ДУС-У) 9.
На азимутальной части ОПУ (AЗ ОПУ) 5 установлены электродвигатель угломестного привода (ЭД-У) 10, механически связанный с редуктором угломестного привода (Р-У) 11, поворачивающим угломестную часть ОПУ (УЧ ОПУ) 6 относительно азимутальной части ОПУ (AЗ ОПУ) 5, датчик положения угломестного привода (ДП-У) 12, фиксатор транспортного положения угломестного привода (ФТП-У) 13, концевые выключатели верхнего положения угломестного привода (КВУ) 14 и нижнего положения угломестного привода (КНУ) 15, кинематически связанные с угломестной частью ОПУ (УЧ ОПУ) 6.
В основании ОПУ (ОСН ОПУ) 4 установлены электродвигатель азимутального привода (ЭД-А) 16, механически связанный с редуктором азимутального привода (Р-А) 17, поворачивающим азимутальную часть ОПУ (АЧ ОПУ) 5 относительно основания ОПУ (ОСН ОПУ) 4, датчик положения азимутального привода (ДП-А) 18, фиксатор транспортного положения азимутального привода (ФТП-А) 19, концевые выключатели правого положения азимутального привода (КПА) 20 и левого положения азимутального привода (КЛА) 21, кинематически связанные с азимутальной частью ОПУ (AЗ ОПУ) 5.
Станция управления ОПУ (СУ-ОПУ) 3 включает в себя структурные элементы, связанные между собой электрическими связями: первый сумматор (Σ1-A) 22, второй сумматор (Σ2-А) 23, третий сумматор (Σ3-У) 24, четвертый сумматор (Σ4-У) 25, пятый сумматор (Σ5-A) 26, шестой сумматор (Σ6-У) 27, первое интегральное звено (∫1-A) 28, второе интегральное звено (∫2-У) 29, первый коммутатор (SW1-A) 30, второй коммутатор (SW2-У) 31, блок обработки информации (БОИ) 32, звено коррекции азимутального привода (ЗК-А) 33, звено коррекции угломестного привода (ЗК-У) 34, усилитель мощности азимутального привода (УМ-А) 35, усилитель мощности угломестного привода (УМ-У) 36.
Опорно-поворотное устройство работает следующим образом:
Оператор с автоматизированного рабочего места (АРМ) 1 выбирает режим работы опорно-поворотного устройства (ОПУ) 2. Опорно-поворотное устройство (ОПУ) 2 может работать в следующих режимах:
- режим стабилизированного наведения объекта наведения 7 на удаленный предмет наведения;
- режим приведения объекта наведения 7 к заданному угловому положению;
- режим стабилизированного удержания положения в пространстве объекта наведения 7, в установленном положении при внешних колебаниях основания ОПУ (ОСН ОПУ) 4 в азимутальной и угломестной плоскостях;
- режим наведения с ограничением углов;
- режим приведения в транспортное положение.
Могут также использоваться комбинации указанных режимов для получения необходимого закона управления объектом наведения 7.
В качестве объекта наведения 7 может быть использовано как оптическое многофункциональное устройство, так и антенна радиотехнического устройства.
Режим стабилизированного наведения
Команда на выбор режима стабилизированного наведения поступает с автоматизированного рабочего места (АРМ) 1 в блок обработки информации (БОИ) 32 станции управления ОПУ (СУ-ОПУ) 3. При этом в блоке обработки информации (БОИ) 32 вырабатывается команда на переключение коммутаторов первого (SW1-A) 30 и второго (SW2-У) 31 в режим работы по сигналам с первого (Σ1-А) 22 и четвертого (Σ4-У) 25 сумматоров соответственно.
Сигнал, пропорциональный скорости наведения в азимутальной плоскости, поступает из автоматизированного рабочего места (АРМ) 1 на второй вход первого сумматора (Σ1-А) 22 станции управления ОПУ (СУ-ОПУ) 3. На первый вход первого сумматора (Σ1-А) 22 поступает сигнал с датчика абсолютной угловой скорости азимутальной плоскости (ДУС-А) 8, механически установленного на угломестной части ОПУ (УЧ ОПУ) 6.
Сигнал, пропорциональный скорости наведения в угломестной плоскости, поступает из автоматизированного рабочего места (АРМ) 1 на второй вход четвертого сумматора (Σ4-У) 25 станции управления ОПУ (СУ-ОПУ) 3. На первый вход четвертого сумматора (Σ4-У) 25 поступает сигнал с датчика абсолютной угловой скорости угломестной плоскости (ДУС-У) 9, механически установленного на угломестной части ОПУ (УЧ ОПУ) 6.
Суммарные сигналы датчиков абсолютной угловой скорости в азимутальной плоскости (ДУС-А) 8 и в угломестной плоскости (ДУС-У) 9 совместно с заданными соответствующими скоростями наведения в азимутальной и угломестной плоскостях из автоматизированного рабочего места (АРМ) 1 поступают на вход соответственно первого (∫1-A) 28 и второго (∫2-У) 29 интегральных звеньев. Таким образом, в результате обработки интегральными звеньями алгебраически суммированных сигналов вырабатываются соответствующие сигналы ошибок в угломестной и азимутальной плоскостях, величина и знак которых указывают угловое рассогласование соответственно азимутальной части ОПУ (AЗ ОПУ) 5 и угломестной части ОПУ (УЧ ОПУ) 6.
Данные сигналы ошибки рассогласования через коммутаторы первый (SW1-A) 30 и второй (SW2-У) 31 поступают соответственно на звено коррекции азимутального привода (ЗК-А) 33 и звено коррекции угломестного привода (ЗК-У) 34. Звенья коррекции азимутального привода (ЗК-А) 33 и угломестного привода (ЗК-У) 34 служат для расширения полосы пропускания приводов, соответственно позволяющих регулировать коэффициент передачи в зависимости от частотной характеристики механической части ОПУ с учетом механических резонансных частот. Высокий коэффициент передачи позволяет получать высокие точностные параметры и минимальную ошибку рассогласования.
С выхода звеньев коррекции азимутального привода (ЗК-А) 33 и угломестного привода (ЗК-У) 34 сигналы подаются соответственно на пятый (Σ5-А) 26 и шестой (Σ6-У) 27 сумматоры, где складываются соответственно, с заданным коэффициентом, с сигналами обратных связей с датчиков абсолютной угловой скорости в азимутальной плоскости (ДУС-А) 8 и в угломестной плоскости (ДУС-У) 9. Данные отрицательные обратные связи позволяют повысить плавность наведения ОПУ соответственно в азимутальной и угломестной плоскостях за счет глубокого охвата выходного звена по абсолютной скорости.
Сигналы с выхода пятого (Σ5-A) 26 и шестого (Σ6-У) 27 сумматоров подаются соответственно на усилитель мощности азимутального привода (УМ-А) 35 и усилитель мощности угломестного привода (УМ-У) 36, где усиливаются и подаются соответственно на управление электродвигателем азимутального привода (ЭД-А) 16 и угломестного привода (ЭД-У) 10 в режимах широтно-импульсной модуляции (ШИМ) или векторного управления, определяемых конструкцией (ЭД-А) 16 и (ЭД-У) 10. Электродвигатели азимутального привода (ЭД-А) 16 и угломестного привода (ЭД-У) 10 через выходной вал кинематически соединены соответственно с редуктором азимутального привода (Р-А) 17 и редуктором угломестного привода (Р-У) 11, выходные валы которых соответственно кинематически соединены с азимутальной частью ОПУ (АЧ ОПУ) 5 и с угломестной частью ОПУ (УЧ ОПУ) 6 и поворачивают с заданной оператором с автоматизированного рабочего места (АРМ) 1 скоростью и в заданном направлении объект наведения 7.
Таким образом, режим стабилизированного наведения ОПУ в угломестной и азимутальной плоскостях обеспечивается за счет введения сигналов обратных связей по абсолютной угловой скорости, формируемых датчиками абсолютной угловой скорости в азимутальной (ДУС-А) 8 и угломестной (ДУС-У) 9, жестко закрепленных на объекте наведения (управления).
Режим приведения к заданному угловому положению
Команда на выбор режима приведения к заданному угловому положению поступает с автоматизированного рабочего места (АРМ) 1 в блок обработки информации (БОИ) 32 станции управления ОПУ (СУ-ОПУ) 3. При этом в блоке обработки информации (БОИ) 32 вырабатывается команда на переключение коммутаторов первого (SW1-A) 30 и второго (SW2-У) 31 в режим работы по сигналам со второго (Σ2-А) 23 и третьего (Σ3-У) 24 сумматоров соответственно.
Сигнал приведения в виде заданного угла в азимутальной плоскости поступает из автоматизированного рабочего места (АРМ) 1 на второй вход второго сумматора (Σ2-А) 23 станции управления ОПУ (СУ-ОПУ) 3. На первый вход второго сумматора (Σ2-А) 23 поступает сигнал с датчика положения азимутальной плоскости (ДП-А) 18, жестко механически установленного на основании ОПУ (ОСН ОПУ) 4 и кинематически связанного с азимутальной частью ОПУ (АЧ ОПУ) 5.
Сигнал приведения в виде заданного угла в угломестной плоскости поступает из автоматизированного рабочего места (АРМ) 1 на второй вход третьего сумматора (Σ3-У) 24 станции управления ОПУ (СУ-ОПУ) 3. На первый вход третьего сумматора (Σ3-У) 24 поступает сигнал с датчика положения угломестной плоскости (ДП-У) 12, механически установленного на части ОПУ (АЧ ОПУ) 5 и кинематически связанного с угломестной частью ОПУ (УЧ ОПУ) 6. Суммарные сигналы датчиков положения в азимутальной плоскости (ДП-А) 18 и в угломестной плоскости (ДП-У) 12 совместно с заданными соответствующими углами из автоматизированного рабочего места (АРМ) 1 поступают на вход соответственно первого (SW1-А) 30 и второго (SW2-У) 31 коммутаторов.
В результате обработки суммированных сигналов вырабатываются соответственно сигналы ошибки (углы), величина и знак которых указывают угловое рассогласование соответственно азимутальной части ОПУ (AЗ ОПУ) 5 и угломестной части ОПУ (УЧ ОПУ) 6. Данные сигналы ошибок (углы), рассогласования через коммутаторы первый (SW1-A) 30 и второй (SW2-У) 31 поступают соответственно на звено коррекции азимутального привода (ЗК-А) 33 и звено коррекции угломестного привода (ЗК-У) 34. Далее процесс приведения на заданный угол происходит аналогично описанному выше режиму стабилизированного наведения.
По достижении заданного углового положения в азимутальной и угломестной плоскостях объект наведения 7 удерживается на заданных углах с заданной точностью. При этом глубина обратных связей по абсолютной угловой скорости на пятом (Σ5-A) 26 и шестом (Σ6-У) 27 сумматорах позволяет подобрать оптимальный переходный процесс для данного объекта наведения 7.
Таким образом, режим приведения к заданному угловому положению обеспечивается за счет введения обратных связей по положению и сигналов по абсолютной угловой скорости объекта наведения.
Режим стабилизированного удержания положения
Команда на выбор режима стабилизированного удержания положения поступает с автоматизированного рабочего места (АРМ) 1 в блок обработки информации (БОИ) 32 станции управления ОПУ (СУ-ОПУ) 3 после достижения объекта наведения 7 заданного углового положения. При этом в блоке обработки информации (БОИ) 32 вырабатывается команда на переключение коммутаторов первого (SW1-A) 30 и второго (SW2-У) 31 в режим работы по сигналам с первого (Σ1-A) 22 и четвертого (Σ4-У) 25 сумматоров соответственно.
При этом сигнал скорости наведения в азимутальной плоскости, поступающий из автоматизированного рабочего места (АРМ) 1 на второй вход первого сумматора (Σ1-A) 22 станции управления ОПУ (СУ-ОПУ) 3, приравнивается к нулю. На первый вход первого сумматора (Σ1-А) 22 поступает сигнал с датчика абсолютной угловой скорости азимутальной плоскости (ДУС-А) 8, механически установленного на угломестной части ОПУ (УЧ ОПУ) 6.
Сигнал скорости наведения в угломестной плоскости, поступающий из автоматизированного рабочего места (АРМ) 1 на второй вход четвертого сумматора (Σ4-У) 25 станции управления ОПУ (СУ-ОПУ) 3, приравнивается к нулю. На первый вход четвертого сумматора (Σ4-У) 25 поступает сигнал с датчика абсолютной угловой скорости угломестной плоскости (ДУС-У) 9, механически установленного на угломестной части ОПУ (УЧ ОПУ) 6.
Суммарные сигналы датчиков абсолютной угловой скорости в азимутальной плоскости (ДУС-А) 8 и в угломестной плоскости (ДУС-У) 9 совместно с заданными нулевыми соответствующими скоростями наведения из автоматизированного рабочего места (АРМ) 1 поступают на вход соответственно первого (∫1-A) 28 и второго (∫2-У) 29 интегральных звеньев. В результате обработки данных сигналов на выходах первого (∫1-A) 28 и второго (∫2-У) 29 интегральных звеньев вырабатываются соответствующие сигналы ошибок в азимутальной и утломестной плоскостях, вызванные отклонением от установленного исходного положения в пространстве объекта наведения 7. Величина и знак полученных таким образом ошибок указывают угловое рассогласование соответственно азимутальной части ОПУ (AЗ ОПУ) 5 и угломестной части ОПУ (УЧ ОПУ) 6.
Данные сигналы ошибок рассогласования через коммутаторы первый (SW1-A) 30 и второй (SW2-У) 31 поступают соответственно на звено коррекции азимутального привода (ЗК-А) 33 и звено коррекции угломестного привода (ЗК-У) 34. Далее процесс стабилизированного удержания положения происходит аналогично описанному выше режиму стабилизированного наведения. При появлении рассогласования, вызванного отклонением основания ОПУ (ОСН ОПУ) 4, а вместе с ним и кинематически связанного объекта наведения 7 от заданного положения в пространстве, происходит изменение абсолютной угловой скорости угломестной части ОПУ (УЧ ОПУ) 6, измеряемое механически установленными на ней датчиками абсолютной угловой скорости (ДУС-А) 8 и (ДУС-У) 9. Таким образом, режим стабилизированного удержания положения обеспечивается за счет введения сигналов обратных связей по абсолютной угловой скорости объекта наведения.
Режим наведения с ограничением углов
Режим наведения с ограничением углов позволяет повысить надежность и исключить возможность повреждения конструкции ОПУ и электроприводов при наведении в угломестной и азимутальной плоскостях при условии ограничения углов прокачки объекта наведения 7. Данная функция осуществляется за счет введения концевых выключателей верхнего (КВУ) 14 и нижнего (КНУ) 15, правого (КПА) 20 и левого (КЛА) 21 положения соответственно угломестного и азимутального приводов. Сигналы с концевых выключателей поступают на второй вход блока обработки информации (БОИ) 32, где вырабатывается команда в автоматизированное рабочее место (АРМ) 1 на запрещение движения в опасную зону.
Режим приведения к транспортному положению
Для приведения к транспортному положению вырабатывается соответствующая команда в автоматизированном рабочем месте (АРМ) 1 и передается на вход блока обработки информации (БОИ) 32. По данной команде происходят переключения аналогично режиму приведения к заданному угловому положению. При этом азимутальная часть ОПУ (A3 ОПУ) 5 и угломестная часть ОПУ (УЧ ОПУ) 6 приводятся на транспортные углы, заданные конструкцией ОПУ. По достижению заданных конструкцией ОПУ транспортных углов в азимутальной и угломестной плоскостях происходит удержание объекта наведения 7 на заданных углах и с заданной точностью. После чего блоком обработки информации (БОИ) 32 подаются команды на фиксаторы транспортного положения в азимутальной плоскости (ФТП-А) 19 и угломестной плоскости (ФТП-У) 13. По окончании процесса фиксации азимутальной части ОПУ (AЗ ОПУ) 5 и угломестной части ОПУ (УЧ ОПУ) 6 блоком обработки информации (БОИ) 32 вырабатываются соответствующие команды о состоянии фиксации ОПУ в каждой из плоскостей и передаются на автоматизированное рабочее место (АРМ) 1.
Отдельные новые элементы заявляемого ОПУ реализованы как часть программного обеспечения структурных элементов, таких как сумматоры, интегральные звенья, звенья коррекции, коммутаторы, блок обработки информации (БОИ) станции управления ОПУ (СУ ОПУ), при этом обработка получаемых и передаваемых данных осуществляется модулями, такими как модули аналого-цифрового преобразования сигналов с датчиков положения и датчиков абсолютной угловой скорости, а также модулями цифро-аналогового преобразования, такими как управление усилителями мощности.
Выходной каскад усилителей мощности может быть выполнен по мостовой схеме, построенной на транзисторных сборках, управляемых либо в режиме широтно-импульсной модуляции (ШИМ), либо в режиме векторного управления синхронным электродвигателем.
(См. книгу под редакцией Богнера Р. и Константинидиса А. Введение в цифровую фильтрацию, пер. с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. Искусство схемотехники, пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып. 1).
(См. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с).
Таким образом, заявляемое в качестве изобретения опорно-поворотное устройство позволяет:
обеспечить точное определение местоположения объекта наведения относительно основания ОПУ за счет введения датчиков положения соответственно азимутальной части ОПУ и угломестной части ОПУ;
- повысить и исключить возможность повреждения конструкции ОПУ и электроприводов при наведении в угломестной и азимутальной плоскостях при ограничении углов прокачки объекта наведения за счет введения концевых выключателей верхнего и нижнего, правого и левого положения соответственно угломестного и азимутального приводов;
- обеспечить возможность дистанционного управления процессом наведения из системы управления объекта применения по заданным угловым координатам за счет получения в автоматизированном рабочем месте обратных связей по положению объекта наведения с датчиков положения в азимутальной и угломестной плоскостях;
- обеспечить высокое качество процесса наведения (плавность наведения, заданная скорость наведения), связанное за счет наличия обратных связей по скорости перемещения объекта наведения в азимутальной и угломестной плоскостях;
- обеспечить возможность жестко фиксировать азимутальную и угломестную части ОПУ при транспортировке за счет применения фиксаторов транспортного положения в азимутальной и угломестной плоскостях, что позволяет исключить возможность механической поломки редукторов;
- обеспечить возможность использования режима стабилизированного удержания объекта наведения в заданном положении при колебаниях основания ОПУ за счет использования сигналов с датчиков абсолютной угловой скорости в азимутальной и угломестной плоскостях после обработки их соответствующими интегральными звеньями и звеньями коррекции.
Приведенные в описании технические преимущества, целесообразность и надежность ОПУ, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытных образцов ОПУ на испытательной базе ОАО «СКБ ПА», ОАО «КЭМЗ» г. Ковров и в составе объектов применения как с оптическим прибором наведения в АО НПП «Радиозавод» г. Пенза, так и с антенной радиотехнического прибора наведения на объектах в АО «НИИТП» г. Москва и АО «КБ Луч» г. Рыбинск.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГИРОСТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПЕРИСКОПА ПОДВОДНОЙ ЛОДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2184938C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА | 2014 |
|
RU2572218C9 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| АППАРАТУРА ПРИЕМА И РЕАЛИЗАЦИИ ЦЕЛЕУКАЗАНИЯ | 2002 |
|
RU2236666C2 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ БОЛЬШОЙ ДАЛЬНОСТИ "ФОКУС-Д" | 2009 |
|
RU2427006C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
Изобретение относится к опорно-поворотным устройствам (ОПУ), преимущественно к автоматическим системам устройств мобильных антенных и оптических установок. Предложено опорно-поворотное устройство, в которое дополнительно введены с соответствующими связями с другими элементами станция управления опорно-поворотного устройства (СУ-ОПУ), включающая в себя первый, второй, третий, четвертый, пятый и шестой сумматоры (Σ1-А, Σ2-А, Σ3-У, Σ5-У, Σ5-A, Σ6-У), первое и второе интегральное звено (∫1-A, ∫2-У), первый и второй коммутаторы (SW1-A, SW2-Y), звено коррекции азимутального привода (ЗК-А), звено коррекции угломестного привода (ЗК-У), усилитель мощности азимутального привода (УМ-А), усилитель мощности угломестного привода (УМ-У), блок обработки информации (БОИ), а также датчики положения азимутального и угломестного приводов (ДП-А и ДП-У), концевые выключатели верхнего и нижнего положений угломестного привода (КВУ и КНУ), концевые выключатели правого и левого положений азимутального привода (КПА и КЛА), азимутальный и угломестный фиксаторы транспортного положения (ФТП-А и ФТП-У), датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях (ДУС-У и ДУС-А). Технический результат - повышение эксплуатационных возможностей устройства за счет обеспечения возможности точного определения местоположения объекта наведения относительно основания ОПУ, высокой надежности заявляемой конструкции ОПУ от возможного повреждения при ограничении углов прокачки объекта наведения в угломестной плоскости, а также при ее транспортировке, повышения удобства управления ОПУ с обеспечением возможности ее дистанционного управления (наведения) и автоматизацией выполнения операций, повышения качества процесса наведения (плавность наведения, обеспечение заданной скорости наведения), обеспечения режима стабилизированного удержания объекта наведения в заданном положении при колебаниях основания ОПУ. 1 ил.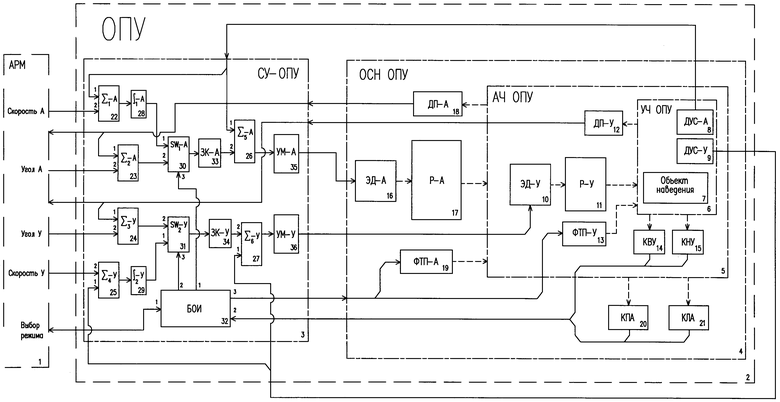
Опорно-поворотное устройство, содержащее автоматизированное рабочее место, основание опорно-поворотного устройства с установленным электродвигателем азимутального привода и редуктором азимутального привода, азимутальную часть опорно-поворотного устройства с установленным электродвигателем угломестного привода и редуктором угломестного привода, угломестную часть опорно-поворотного устройства с жестко установленным на ней объектом наведения, отличающееся тем, что в него дополнительно введены
датчики положения азимутального и угломестного приводов (ДП-А и ДП-У), концевые выключатели верхнего и нижнего положений угломестного привода (КВУ и КНУ), концевые выключатели правого и левого положений азимутального привода (КПА и КЛА), азимутальный и угломестный фиксаторы транспортного положения (ФТП-А и ФТП-У), датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях (ДУС-У и ДУС-А), а также станция управления опорно-поворотным устройством (СУ-ОПУ), включающая в себя первый, второй, третий, четвертый, пятый и шестой сумматоры (Σ1-A, Σ2-А, Σ3-У, Σ4-У, Σ5-A, Σ6-У), первое и второе интегральное звено (∫1-А, ∫2-У), первый и второй коммутаторы (SW1-A, SW2-У), звено коррекции азимутального привода (ЗК-А), звено коррекции угломестного привода (ЗК-У), усилитель мощности азимутального привода (УМ-А), усилитель мощности угломестного привода (УМ-У) и блок обработки информации (БОИ),
при этом датчики абсолютной угловой скорости в угломестной и азимутальной плоскостях механически жестко связаны с угломестной частью опорно-поворотного устройства, а датчик абсолютной угловой скорости в азимутальной плоскости электрически связан с первыми входами первого и пятого сумматоров, второй вход первого сумматора электрически связан с выходом автоматизированного рабочего места по заданной скорости наведения в азимутальной плоскости, выход первого сумматора связан с входом первого интегрального звена, выход которого, в свою очередь, связан с первым входом первого коммутатора, второй вход первого коммутатора связан с выходом второго сумматора, первый вход второго сумматора электрически связан с автоматизированным рабочим местом и датчиком положения азимутального привода, установленным на основании опорно-поворотного устройства и кинематически связанным с азимутальной частью опорно-поворотного устройства, второй вход второго сумматора электрически связан с выходом автоматизированного рабочего места по заданному угловому положению в азимутальной плоскости, выход первого коммутатора связан с входом звена коррекции азимутального привода, выход которого электрически связан со вторым входом пятого сумматора, выход которого электрически связан с усилителем мощности азимутального привода, электрически связанного с электродвигателем азимутального привода и вращающего вал электродвигателя азимутального привода, который механически связан с редуктором азимутального привода, при этом датчик абсолютной угловой скорости в угломестной плоскости электрически связан с первыми входами четвертого и шестого сумматора, второй вход четвертого сумматора электрически связан с выходом автоматизированного рабочего места по заданной скорости наведения в угломестной плоскости, выход четвертого сумматора связан с входом второго интегрального звена, выход которого, в свою очередь, связан с первым входом второго коммутатора, второй вход второго коммутатора связан с выходом третьего сумматора, причем первый вход третьего сумматора электрически связан с автоматизированным рабочим местом и датчиком положения угломестного привода, установленным на азимутальной части опорно-поворотного устройства и кинематически связанным с угломестной частью опорно-поворотного устройства, второй вход третьего сумматора электрически связан с выходом автоматизированного рабочего места по заданному угловому положению в угломестной плоскости, выход второго коммутатора связан с входом звена коррекции угломестного привода, выход которого электрически связан с усилителем мощности угломестного привода, электрически связанного с электродвигателем угломестного привода и вращающего вал электродвигателя угломестного привода, который механически связан с редуктором угломестного привода, при этом, с одной стороны, первый и второй коммутаторы электрически связаны соответственно с первым и вторым выходами блока обработки информации, который в свою очередь электрически связан с входом-выходом автоматизированного рабочего места, определяющего заданный режим работы опорно-поворотного устройства,
с другой стороны, блок обработки информации электрически связан с азимутальным и угломестным фиксаторами транспортного положения, которые кинематически связаны соответственно с азимутальной и угломестной частями опорно-поворотного устройства,
причем концевые выключатели верхнего и нижнего положения угломестного привода с одной стороны кинематически связаны с угломестной частью опорно-поворотного устройства, а с другой стороны электрически связаны с блоком обработки информации,
в свою очередь, концевые выключатели правого и левого положения азимутального привода с одной стороны кинематически связаны с азимутальной частью опорно-поворотного устройства, а с другой стороны электрически связаны с блоком обработки информации.
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2002 |
|
RU2209495C1 |
| US 6559805 B2, 06.05.2003 | |||
| US 4209789 A, 24.06.1980 | |||
| CN 102280710 A, 14.12.2011 | |||
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2008 |
|
RU2359372C1 |
| CN 103746186 A, 23.04.2014 | |||
| УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ АНТЕННЫ | 1993 |
|
RU2057385C1 |

