1 Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач.
Цель изобретения - повышение точности измерения погрешности сборки путем обеспечения возможности п роиз- водить сравнение с идеальным редуктором. .
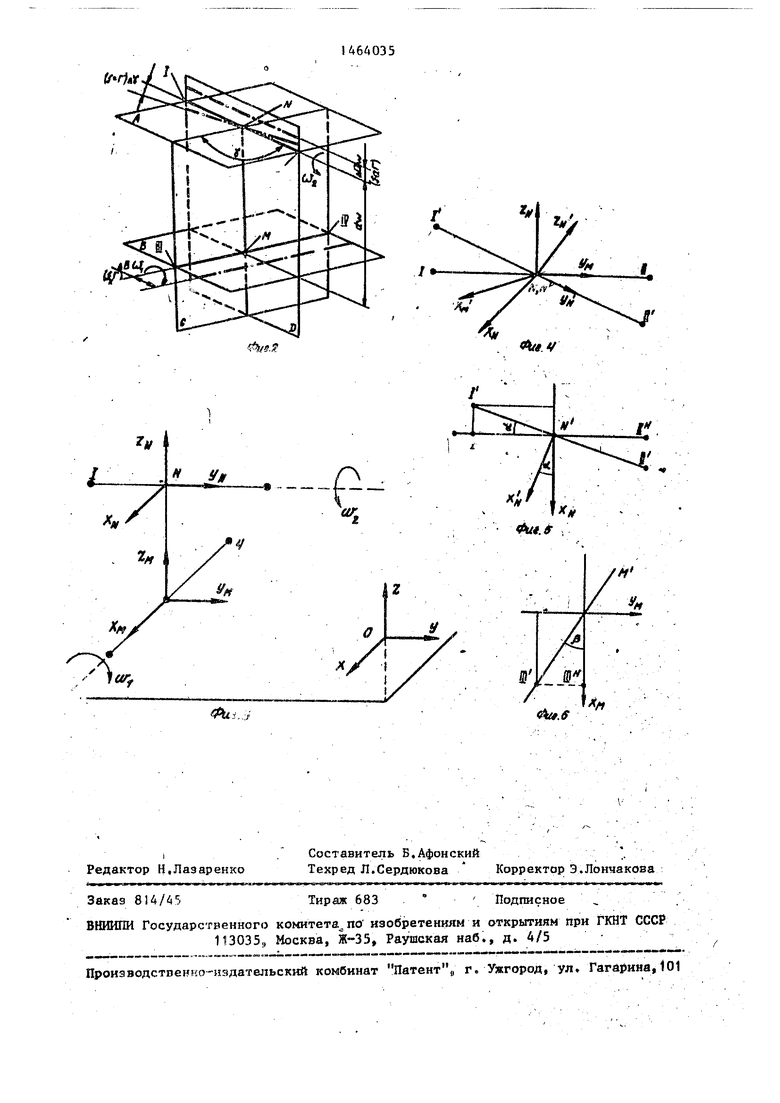
На фиг. изображена схема устройства для реализации способа; на фиг.2 - схема взаимного расположения осей червячного редуктора; на фиг.З - схема взаимного положения неподвижной системы координат X,-Y, Z и вспомогательных систем координат X , Уд,, Х(,, Уц, Z идеальной передачи; на фиг.4 - схема взаимного положения осей вала червячного колеса идеальной и контролируемой передачи в результа те параллельного переноса оси; на фиг.5 - схема проекции точек осей вала на координатные оси Х, Уц ; на
(Л
фиг.6 схема проекции точек осей вала на координате оси X.,, У.. ,
М
На фиг.2 положение центров крайних торцовых сечений вала червячного Колеса (ведомого вал а) обозначено т. I и II положение центров крайних тор цовьгх сечений червяка (ведущего вала) т. Ill и IV, положение осей идеаль- ной передачи - сплошной линией, поло жение осей контролируемой передачи - штрихпунктирной линией.
Устройство для реализации способа включает в себя основание 1, стол 2 для установки контролируемого редуктора 3, контрольно-измерительные приспособления 4, источник 5 направленного света, прямую многогранную призму 6, прозрачную шкалу 7 с нанесенной сеткой и координатно-измери- fельные каретки (не показаны), расположенные на столе 2.
Од сл
3 , 146А035
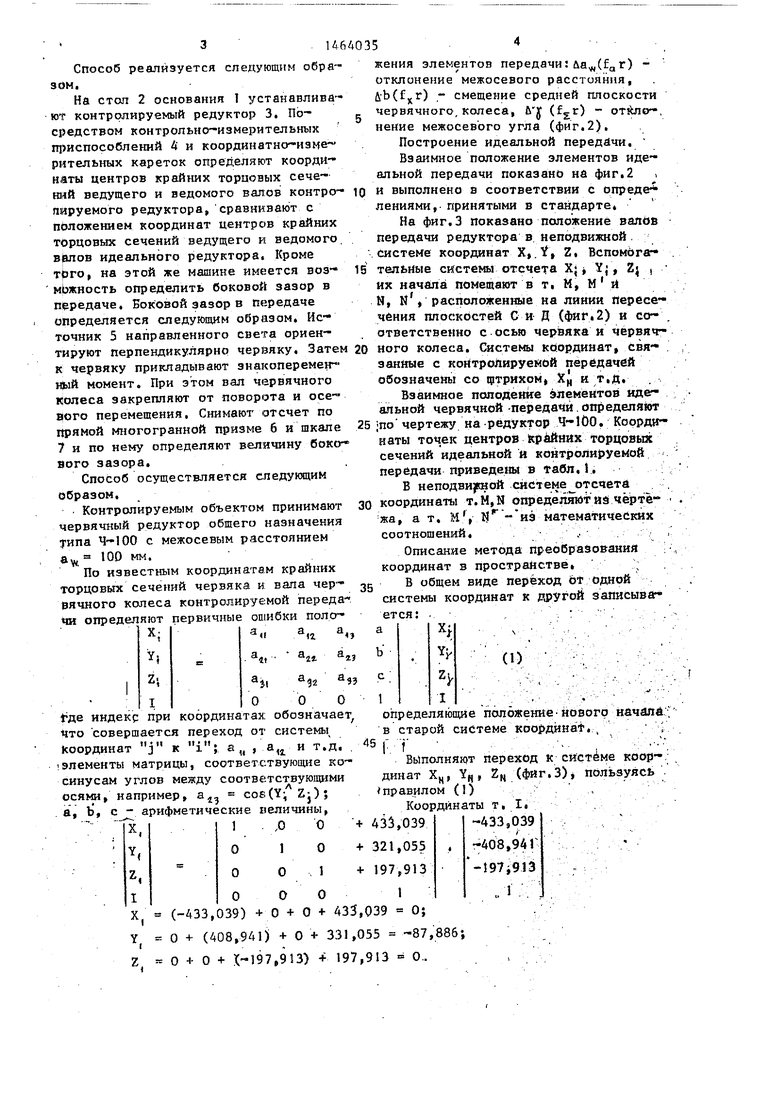
Способ реализуется следующим образом.
На стсхл 2 основания 1 устанавливают контролируемый редуктор 3, Посредством контрольно-измерительных приспособлений 4 и координатно изне рительных кареток определяют координаты центров крайних торцовых сечежения элементов передачи:ua Cf г) - отклонение межосевого расстояния, u-b(fjjr) - смещение средней плоскости червячного, колеса, Ь у () отАло- нение межосевого угла (фиг.2),
Построение идеальной передйчи. Взаимное положение элементов идеальной передачи показано на фиг.2
rl aim ncniiJfO Л| С1«Г1ПЛ -. .
КИЙ ведущего и ведомого валов контро- ю и выполнено в соответствии с опреде
пируемого редуктора, сравнивают с положением координат центров крайних торцовых сечений ведущего и ведомого валов идеального редуктора. Кроме Т0ГО, на этой же машине имеется воз- мЬжность определить боковой зазор в передаче. Боковой зазор в передаче определяется следующим образом. Источник 5 направленного света ориенлениями, принятыми в стандарте
На фиг.З показано положение валЬв передачи редуктора в неподвижной. системе координат X,.Y Z, Вспомбга 15 тельные системы отсчета X;j Yj, Zj , их иачйла помещают в т, М, М и N, N , расположенные на линии пересечения плоскостей Си Д (фиг.2) и со- ответственно с осью чер1вяка и чёрвяч-
тируют перпендикулярно червяку. Затем 20 Ного колеса. Системы координат свяк червяку прикладывают знакоперемен- нцй момент. При этом вал червячного колеса закрепляют от поворота и осевого перемещения. Снимают отсчет по прямой многогранной призме 6 и шкале 7 и по нему определяют величину боко- вого зазора.
Способ осуществляется следующим
образом.
. Контролируемым объектом принимают червячный редуктор общего назначения Т-ипа Ч-100 с межосевым расстоянием
S, lOD мм.
По известным координатам крайних торцовых сечений червяка и вала чер рячного колеса контролируемой передачи определяют первичные ошибки полазанйые с контролируемой передачей обозначены со щтрихом, Х„ и т.д. .
Взаимное полодение элементов идег- альной червячной -передачи.определяют
25 ;по чертежу на -редуктор Ч-ЮО. Коорди наты точ,ек центров 1ср11ЙНйх торцовых сечений идеальной И контролируемой передачи приведены в табл.1.
В неподвижной системе отсчета
30 координаты т.М,Н определяит ий 4ei Teжа, а т. Н , математических соотношений..-.
Описание метода преобразования координат в пространстве ;
3g В общем виде переход от одной системы координат к другой записыват ется: -,. :
У Z5
а
4t
Я
«г
2«.
а
э
Чз
2
Ч
j
Y Zy 1
(1)
о
о
о
индекс при координатах обозначает, Что совершается переход от системы координат J к а„ , а, и т.д. элементы матрицы, соответствующие косинусам углов между соответствующими осями, например, а cos(Y Zj); а, b с - арифметические величины, . X
жения элементов передачи:ua Cf г) - отклонение межосевого расстояния, u-b(fjjr) - смещение средней плоскости червячного, колеса, Ь у () отАло-, нение межосевого угла (фиг.2),
Построение идеальной передйчи. Взаимное положение элементов идеальной передачи показано на фиг.2
. .
и выполнено в соответствии с опреде
лениями, принятыми в стандарте
На фиг.З показано положение валЬв передачи редуктора в неподвижной. системе координат X,.Y Z, Вспомбга тельные системы отсчета X;j Yj, Zj , их иачйла помещают в т, М, М и N, N , расположенные на линии пересечения плоскостей Си Д (фиг.2) и со- . ответственно с осью чер1вяка и чёрвяч-
0 Ного колеса. Системы координат связанйые с контролируемой передачей обозначены со щтрихом, Х„ и т.д. .
Взаимное полодение элементов идег- альной червячной -передачи.определяют
25 ;по чертежу на -редуктор Ч-ЮО. Координаты точ,ек центров 1ср11ЙНйх торцовых сечений идеальной И контролируемой передачи приведены в табл.1.
В неподвижной системе отсчета
30 координаты т.М,Н определяит ий жа, а т. Н , математических соотношений..-.
Описание метода преобразования координат в пространстве ;
3g В общем виде переход от одной системы координат к другой записыват ется: -,. :
1
j
Y Zy 1
(1)
определяюише положение - нового начали.:; в старой системе коо|)дйна1 ., и
51: .у , , /.. -;.- .
выполняют переход к системе коор-. динат Х„, Yf,, ZN (фйг.З) пользуясь . правилом (1)
Координаты т. It .

| название | год | авторы | номер документа |
|---|---|---|---|
| Червячная передача | 1983 |
|
SU1128020A1 |
| Способ нарезания храповых колес и дисковая угловая фреза для его осуществления | 1986 |
|
SU1373501A1 |
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА С ЧПУ | 1990 |
|
RU2047473C1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1441123A1 |
| Червячная передача | 1988 |
|
SU1627777A1 |
| Червячная передача | 1986 |
|
SU1323795A1 |
| Червячная цилиндрическая передача | 1981 |
|
SU1043388A1 |
| Зубчатая передача с переменным передаточным числом | 1985 |
|
SU1263941A1 |
| Способ контроля конического и гипоидного зубчатого колеса | 1985 |
|
SU1272092A1 |
| Двухступенчатый зубчатый редуктор | 1981 |
|
SU973973A1 |

Изобретение относится к машино .строению, а именно к средствам контроля зубчатых передач. Цель изобретения - повышение .точности измерения погрешности сборки путем обеспечения возможности производить сравнение с идеальным редуктором. Это достигается тем, что после определения поло- жения осей редуктора производят по- строение идеального редуктора, ис- пользуя чертежи. Погрешность сборки определяют как разность положения координат концов валов контролируемого и идеального редукторов. 6 ил
(-433,039) + О + О + 433,039 О;
О + (408,941) + О -ь 331,055 -87,886;
О + О + Х-197,913) + 197,913 О..
Координаты т. II
Xj (-А33,039) + О + О 433.039 - 0;
Y - О + (-233,169) 4- О + 321,055 « + 87,887;
Zi - О + О 4- (-197,913) + 197,913 « О,
Координаты т. 1,
х; « (-421,538) + О . О 433, 039 11,,501; Y, - О + (-410,118) О + 321,055 - -89,063; Z; - О + О + (-197,875) + 197,913 0,038
Координаты т, II .
оординаты т. N
xL
Xi 100 +433,039
О ГО +321,055
О О 1 +197,913
О О ОI
Х (-415,833) + О О « 433,039 17,206; Yj - О + (-234,487) + О + 321,055 86,568;
,2 О + О + (-197,925) + 197,913 -0,012.
I ..
an
X,, (-418,686) + О + О + 433,039 14,353; Y|,. О -4- (-322,278) + О + 321,055 -1,223:; z О + О + (-197,900) +. 197,913 0,013..
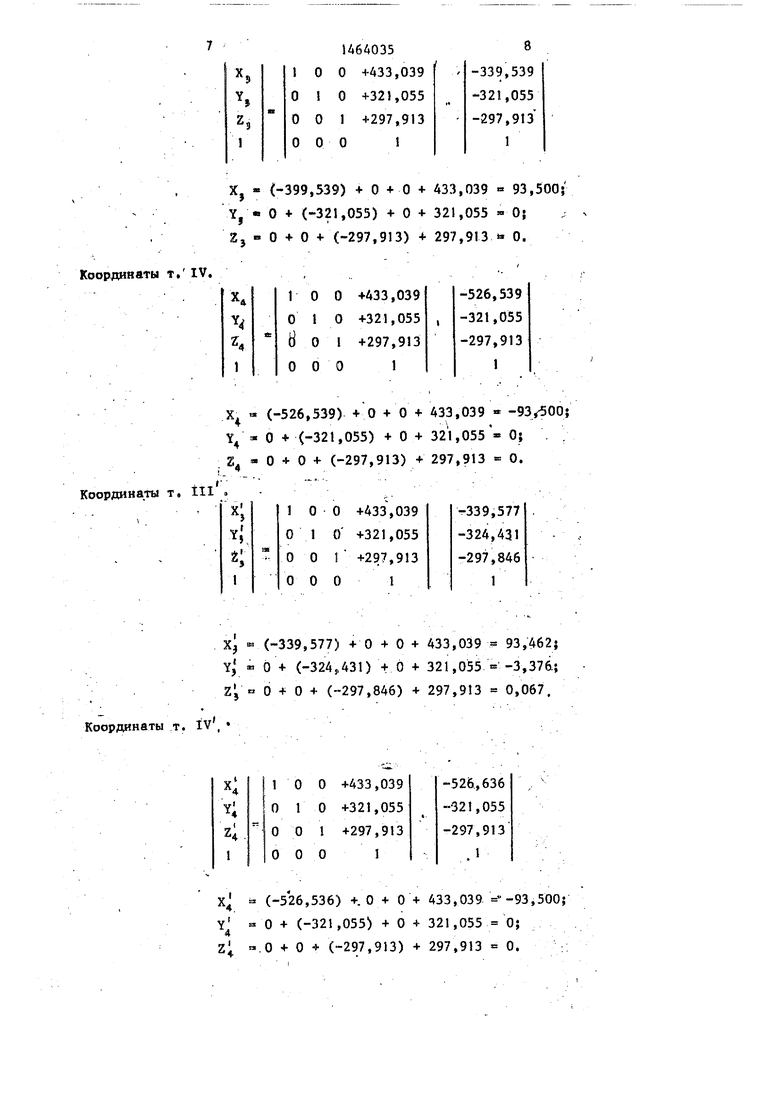
Аналогичным образом переходят К системе координат X ц, Yд, Z, Координаты т. III.
(3)
1Д64035
О О +А33,039 I О +321,055 О 1 -1-297,913 001
X, (-399,539) + О О + 433,039 93,500; Y, О + (-321,055) + О 321,055 0{ Zj « О + О + (-297,913) - 297,913 0.
Координаты т, IV,
Х « (-526,539) +0 +0 + А33,039 -93/500; Y - О +(-321,055) + О + 321,055- 0; 2 О О + (-297,913) + 297,913 « 0.
Координаты т.
til
О+433,039
О +321,055
I +297,913 О 1
xj (-339,577) + О + О + 433,039 - 93,462; Y, « О + (-324,431) +0 + 321,055 -3,376; Z - О + О + (-297,846) + 297,913 0,067.
Координаты т. IV ,
100+433,039
О 1 О+321,055
О О 1+297,913 0001
(-526,536) +. О + О + 433,039 -93,500; О + (-321,055) + О + 321,055 0; .0 + О + (-297,913) + 297,913 0.;;
т,
U6A035
I О О +433,039 О 1 О +321,055 00 1 +297,913 0001
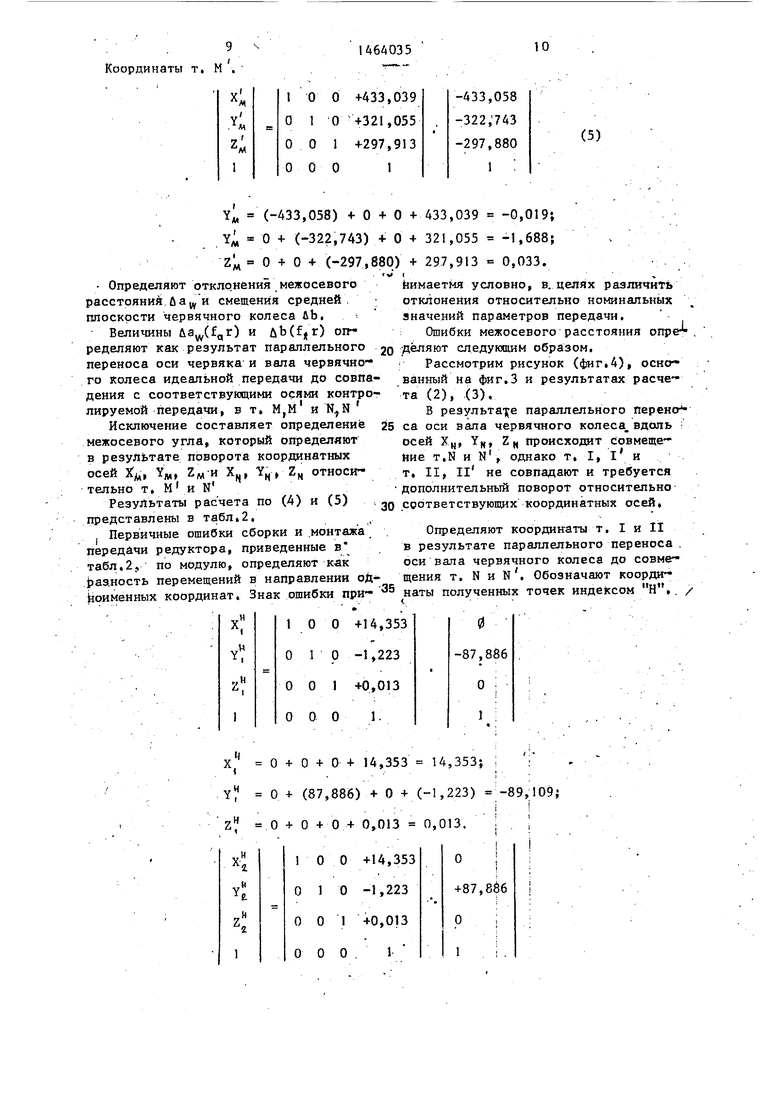
У;ц (-433,058) +0 + 0 + 433,039 -0,019;
Y О + (-322,743) + О + 321,055 -1,688;.
О + О + (-297,880) + 297,913 0,033.
- -
Определяют отклонения межосевогойимаетмя условно, в. целях различить
расстояний ft смещения средней . отклонения относительно номинальных плоскости червячного колеса ЛЬ.значений параметров передачи.
Величины Ла...(дГ) и ub(f,(r) oir Ошибки межосевого расстояния опре ,
ределяют как результат параллельного 20 следуклшм образом, переноса оси червяка и вала червячно- ; Рассмотрим рисунок (фиг,4), осно- го колеса идеальной передачи до совпа- ванный на фиг.З и результатах расче- дения с соответствующими осями контро- та (2), (3).
лируемой передачи, в т. М,М и результат е параллельного перено
Исключение составляет определение 25 са оси вала червячного колееа вдоль ;
осей Х„, У„, Z происходит совмещение T.N и N , однако т, I, l и т, II, II не совпадают и требуется дополнительный поворот относительно 30 соответствующих координатных осей.
межосевого угла, который определяют в результате поворота координатных осей Х, YW, г„и Х, „ Z относительно т, М и N
Результаты расчета по (4) и (5) представлены в табл,2.
Первичные ошибки сборки и монтажа передачи редуктора, приведенные в табл.2., по модулю, определяют как jjas.HocTb перемещений в направлении оД- юименных координат. Знак ощибки при
Определяют координаты т, I и II в результате параллельного переноса . оси вала червячного колеса до совмещения т. N и N t Обозначают коорди- - 35 наты полученных точек индексом Н ,.
/
X
О + О + О + 14,353 14,353; i
Yl 0+ (87,886) + О +(-1,223) -89,,109j
i;
0 + о + о + 0,013 0,013, I ;
100 +14,353 О 1 О -1,223 О О 1 +0,013 000. 1
10
(5)
Д-
Определяют координаты т, I и II в результате параллельного переноса . оси вала червячного колеса до совмещения т. N и N t Обозначают коорди- - 35 наты полученных точек индексом Н ,.
/
X
О + О -f. О + 14,353 14,3531
Y «О + 87,886 + 0 + (-1,223) 86,663;
,
Za - О + О + О 0,013 0,013,
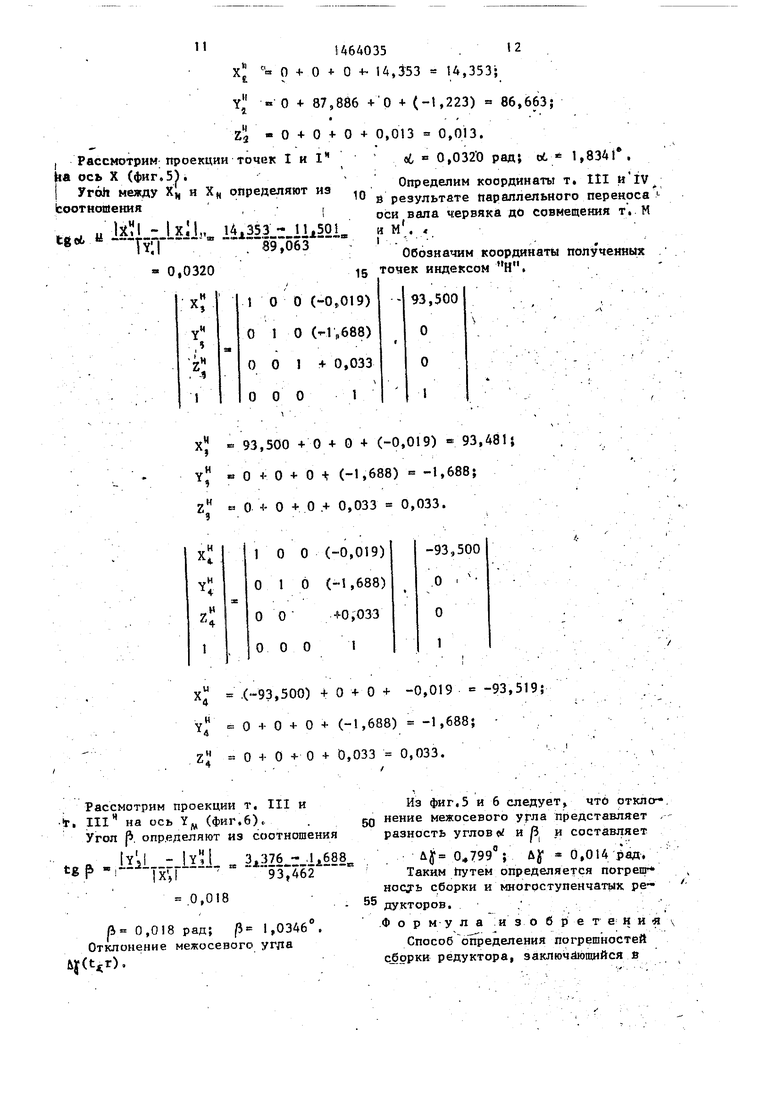
, Рассмотрим проекции точик I и la ось X (фиг. 5) .
Угон между Хц и Х определяют Ьоотноиения,
Г
got.
JUVW4
., IX - lx:i,, . и м . ,
ft 1 Г « -. лt
Опре 10 и резул оси вал
TYfl
89,063
Обоз
Z О О -f- О + 0,033 0,033.
./.
Рассмотрим проекции т. III иИз фиг,5 и 6 следует, что откпо.«г. Ill на ось Y., (фиг.б),,.50 межосевого угла представляет Угол р. опр.еделяют из соотношенияразность углов к и составляет
„ 3j,.lA688 , . j i У 0.014 ад.
tgP
I Y I
1X)I
93,462
Таким йутем определяется погреиг носуь сборки и многоступенчатых ре- 5 дукторов,
.0,018
0,018 рад; fi 1,0346°, Отклонение межосевого угла &y().
JUVW4
и м . ,
в6 « 0,0320 рад; об 1,8341 .
Определим координаты т, 111 и 1У и результате параллельного переноса оси вала червяка дЬ совмещения т. М
Обозначим координаты полученных
, . j i У 0.014 ад.
Таким йутем определяется погреиг носуь сборки и многоступенчатых ре- 5 дукторов,
.Формула ;и 3 о б р е т 6 н и -я
Способ оТГределення погрешностей сборки редуктора, заключйющийся в
П -1А6А035
том, что определяют качество зацегше- ведомого валов контролируемого рения передачи, по которому судят о по- грешности сборки редуктора, о т Л и чающийся тем, что, с Целью повьппения точности, устанавливают ч редуктор на координатно-измерительную машину, определяют координаты центров крайних торцовых сечений ведущего и
дуктора, Сравнивают полученные данн с координатами центров крайних тор- g цобых сечений валов идеального редуктора в системе координат коорди- натно-измерительной машины и получе ную разность принимают за качество зацепления передачи,
t
Фиг,1
ведомого валов контролируемого редуктора, Сравнивают полученные данные с координатами центров крайних тор- g цобых сечений валов идеального редуктора в системе координат коорди- натно-измерительной машины и полученг- ную разность принимают за качество зацепления передачи,
« - t
Таблица
Таблица 2
14,353
. ва/t . KO/ieca
г
Ba/i VJ tfCfldflKa
(
Cr
4%v.
.v
/V
УН
f
/
fll
8W.(f
