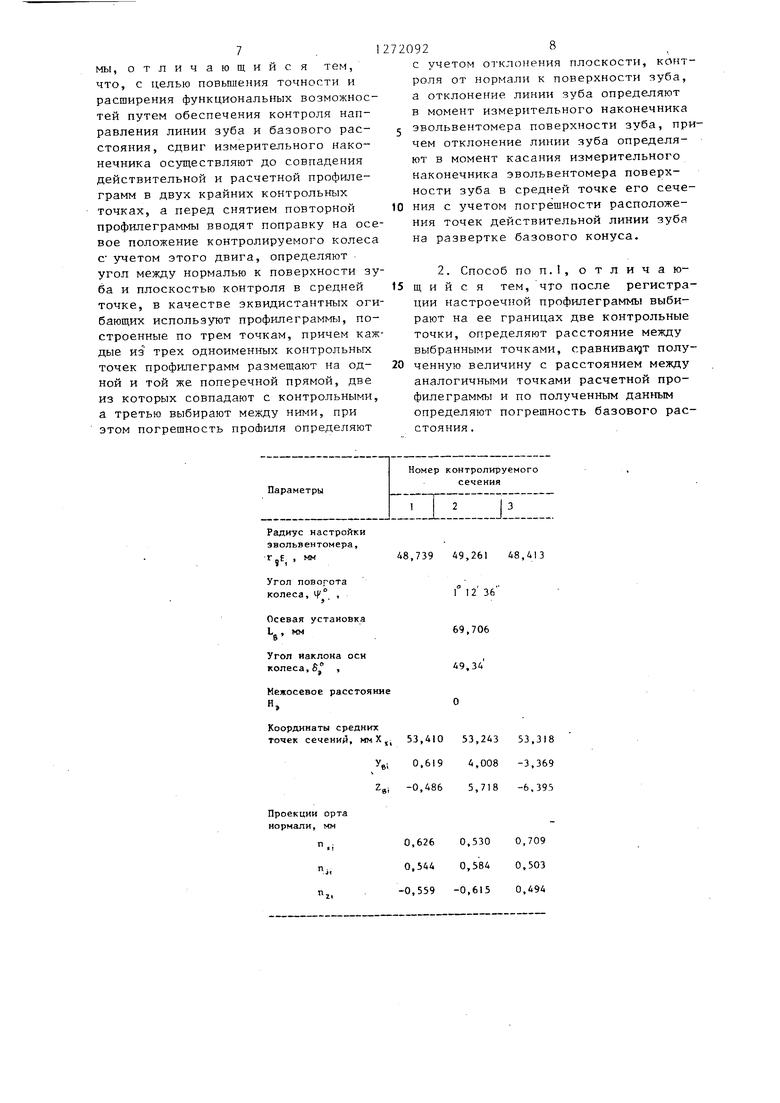
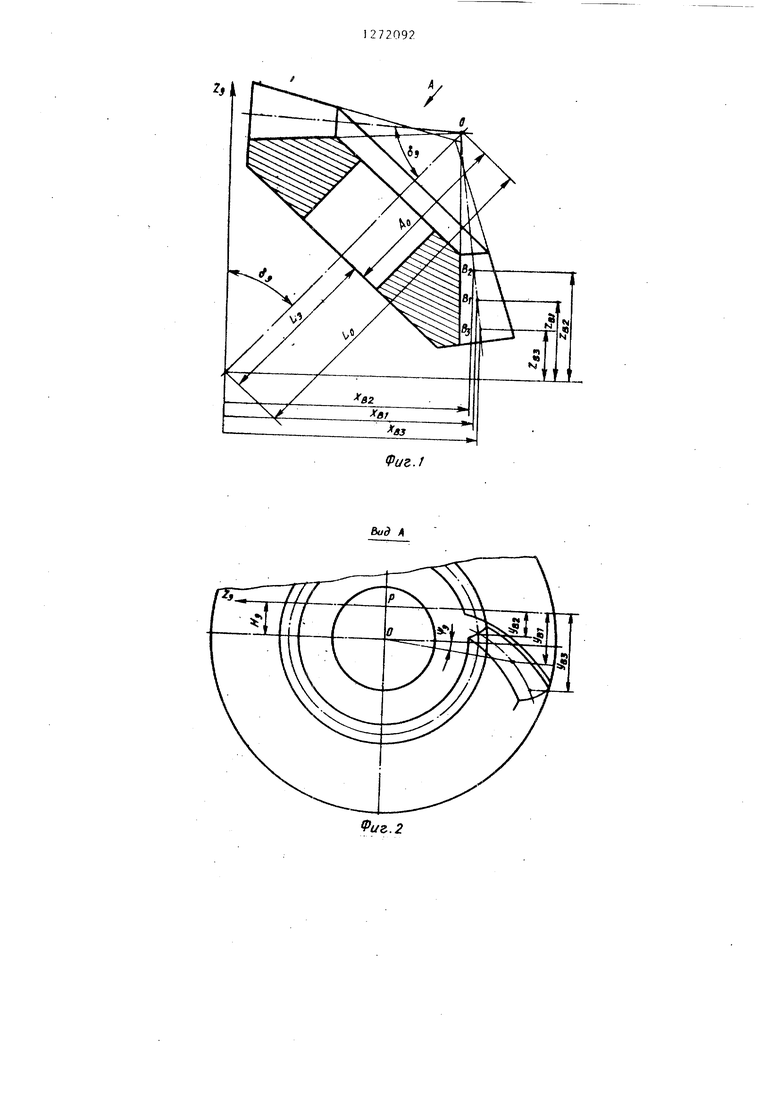
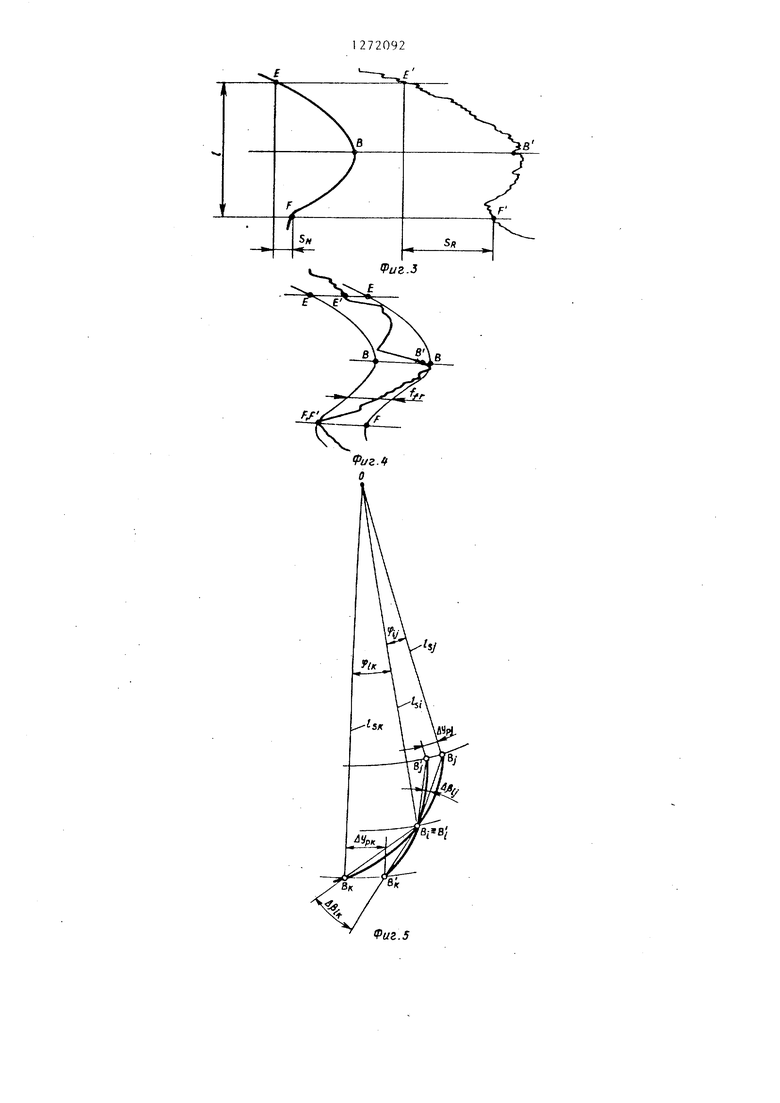
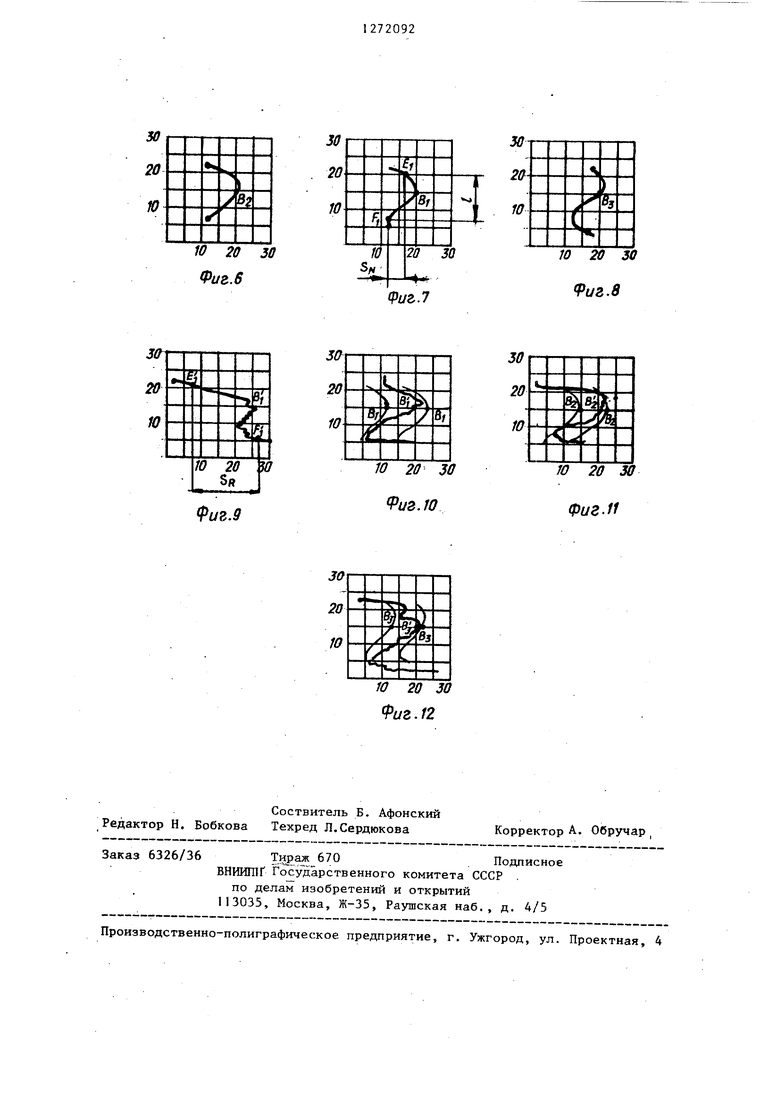
Изобретение относится к машиностроению, а именно к средствам и ме тодам измерения зубчатых колес. Цель изобретения - повъпление точности и расширение функциональнь х возможностей путем обеспечения контроля направления линии зуба и базового расстояния. На фиг. I изображено зубчатое колесо в системе координат Х, Z.; на фиг. 2 - вид А на фиг. 1; на фиг.З схема для определения . поперечных расстояний действительной и расчетной профилеграмм; на фиг, 4 схема, поясняющая порядок определения погрешности профиля.; на фиг. 5 - расчет ная схема для определения погреишости направления линии зуба; на фиг.68 - графики профилеграмм, построенные по расчетным данным в трех сечениях; на фиг. 9 - график реальной профилеграммы, полученный до внесения поправки в осевое положение: контролируемого колеса; на фиг,10-12 графики реальных профилеграмм, полученных после внесения поправки в осе вое положение контролируемого колеса. Реализуется способ на эвольвентомере, где контролируемое колесо уста навливают в исходное положение. Параметры, определяющие исходное положение, предварительно рассчитываются Способ осуществляется следующим образом. По результатам контроля на эвольвентомере определяются погрешности профилей зуба зубчатого колеса, погрешности линии зуба и базовое рассто яние, характеризующее положение контролируемой поверхности зуба относительно базовой поверхности зубзатого колеса. Для этого предварительно рас считывают профилеграммы номинальной поверхности зуба и строят расчетные профилеграммы. В качестве исходных данных при расчете профилеграмм используют наладку зубообрабатывлпщего станка на операции обработки поверхностей зубьев, аряду с расчетом профилегрлмм определяют оптимальные значения параметров уста новки контролируемого зубчгт зго коле са на эвольвентомере: угол 8 яаклона оси колеса к ог.и эвольвентомера, расстояние М между осями, осевой размер L и у1ол ЦX a p a к т e p и з у ю щии угловое положение -зубчатого коле 2 своей оси. Основ ой радиус настройки эвольвентомера также определяют расчетом. Оптимизап.ию параметров Li , И, LJ и-Ч проводят по критерию минимизации ширины профилеграмм (отклонений профилей от соответствугоишх эвольвент). Затем на эвольвентомере записьгоают профилегpaMt-fbj одного или нескольких сечений контролируемого зубчатого колеса и сравнивают их с построенными по результатам расчетов соответствующими рофилеграммами номинальной поверхости зуба и по результатам сравнения вычисляют отклонение а А базового расстояния А контролируемого зубатого колеса от его номинального значения А . Порядок расчета отклонения дА следующий: определяют поперечные расстояния 3 и S между граничньпми точками Е , F и Е, F реальной (записанной) и расчетной профилеграммами (фиг. 3J , при этом продольное расстояние F должно быть одинаковым для обеих профилеграмм; вычисляют погрешность л А по формуле -А EiL:-f - lSblSbb i2E l It 1. pj . s:inS. .cos p угол наклона линии зуба в где я средней расчетной точке; угол профг-шя зуборезного инструмента :; межосевой угол оправки (фиг. 1); поперечные расстояния между граничными точками реальной и расчетнс1Й профилеграмм соответственно; продольное расстояние между гргн тчными точками; основной радиус настройки эвольвентомера; V U - маспгтабы увеличения по продольной и поперечной осям профилеграмм. Другим способом определения погрешности л А базового расстояния является предварительное определение поправки U основного радиуса настройки эвольвентомера, обеспечивающего наилучшее приближение реальных проф1шеграмм к соответствующим рас-. четным (совпадение их в двух контрольных точках) и последующий расчет погрешности .лА по фор, ,A.if .г„. п , а 1 Sj.n 0 Определив погрешность лА базовог расстояния (описанными выше способа ми), изменяют положение контролируе мого зубчатого колеса относительно измерительного наконечника. Это выполняют одним из следующих способов изменяют осевую установку зубчатого колеса на наклонной оси путем внесе ния поправки л.-. L. - L, гдеL - расчетное значение осевой установки (фиг, 1); L - новое значение осевой установки;изменяют основной радиус настройки эвольвентомера, вычислив предварительно поправку ьгор; по формуле : t sinS а// . ЛА -7т- -г--- -- г- (+) 7T+ tg2oi /cos pr Изменив относительное положение контролируемого зубчатого колеса и измерительного наконечника, вновь записьгоают профилетраммы тех же (ил других) сечений поверхности зуба, сравнивая которые с расчетными, опр деляют погрешность профиля .. Для этого на осях записаннь1х профилеграм строят соответствующие расчетные про филеграммы так, что записанная профилеграмма укладывается между двумя расчетными, а последние касаются ее слева и справа в пределах граничных точек (фиг. 4). Поперечное расстояни между расчетными профилеграммами при нимают за искомую погрешность профиля fj. Аналогичные построения прово дят для всех остальных контролируемых сечений. Найденныетаким образом погрешнести профилей пересчитывают в отклонения контролируемой поверхности зуба по нормали к ней. Для этого пог решности профилей умножают на косинус угла между нормалью к поверхности и плоскостью контроля: ffrh fH cosy.,, где f - найденная погрешность профиля i -го сечения; Т. угол между, нормалью к поверхиости и плоскостью кон троля в средней точке i -го сечения. . Для определения отклонений линии зуба регистрируют перемещения измери тельного наконечника при переходе от одного контролируемого сечения к дру гому. Номинальная величина перемещения измерительного нлконечника в .дроекциях на оси коорли))ат X, У, Z (фиг. I и 2) определяется расчетом. При переходе от сечения к сечению устанавливают номинальные величины перемещений вдоль осей Z и X, а координату У определяют в момент касания измерительного наконечника с поверхностью зуба в средней точке В соответствующего Сечения. Далее, определяют значения угловых разностей между этими точками и находят погрешности расположения точек действительной линии зуба на развертке базового конуса (фиг. 5): Ч- arcsin lll-r sinS, )tgg -arcsin (L,-X, , cosS,)tga/ Y Ibl-Sin u .v P X, cosS;-Y, tpc. -Z, sinS, 6 где P.JJ - длина образующей базового конуса от вершины до точки Bj ; 5 - угол при вершине базового конуса; 6i, Bi BJ у 7 .- номинальные значения коорди нат средних точек В; и В1 -л расчетных сечений; , осевая и угловая установки контролируемого колеса на эвольвентомере (фиг. 1); ЛУ,, - разность коорд1нат У.- средних точек В- 1-го сечения фактической и номинальной поверхности зуба; Ы - угол профиля. Выбирая вблизи расчетной точки Вдве близлежащие точки В- и В и заменяя фактическую и номинальную линии зуба ломаными в в в. и В В. В- . J к I J находят погрешность угла наклона фактической линии зуба др. -0,5-(др, . ), (8) где д,. .c2s:fiL :...lii)L . -2is,4, а для др. формулу получают из формулы f9) заменой индекса J/ . Пример. На эвольвентомере проводился контроль выпуклой стороны кругового зуба конического зубчатого колеса, имеющего следующие параметры: число зубьев Z 27; внеш7 . мы, отличающийся тем, что, с целью повьпдения точности и расширения функциональных возможнос тей путем обеспечения контроля направления линии зуба и базового расстояния, сдвиг измерительного наконечника осуществляют до совпадения действительной и расчетной профилеграмм в двух крайних контрольных точках, а перед снятием повторной профилеграммы вводят поправку на осе вое положение контролируемого колеса С учетом этого двига, определяют угол между нормалью к поверхности зу ба и плоскостью контроля в средней точке, в качестве эквидистантных оги бающих используют профилеграммы, построенные по трем точкам, причем каж дые из трех одноимен -П1 х контрольных точек профилеграмм размещают на одной и той же поперечной прямой, две из которых совпадают с контрольными а третью выбирают между ними, при этом погрешность пpoФIiля определяют 928 с учетом отклонения плоскости, контроля от нормали к поверхности зуба, а отклонение линии зуба определяют в момент измерительного наконечника эвольвентомера поверхности зуба, причем отклонение линии зуба определяют в момент касания измерительного наконечника эвольвентомера поверхности зуба в средней точке его сечения с учетом погрешности расположения точек действительной линии зуба на развертке базового конуса. 2. Способ по п., отличающ и и с я тем, что после регистрации настроечной профилеграммы выбирают на ее границах две контрольные точки, определяют расстояние меткду выбранными точками, сравнивакзт полученную величину с расстоянием между аналогичными точками расчетной профилеграммы и по полученным данным определяют погрешность базового расстояния .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля профилей зубьев зубчатых колес | 1991 |
|
SU1772588A1 |
| Способ контроля профиля зуба колеса | 1985 |
|
SU1427158A1 |
| ЭВОЛЬВЕНТОМЕР ДЛЯ ИЗМЕРЕНИЯ ПРОФИЛЯ ЗУБЬЕВШЕСТЕРЕН | 1972 |
|
SU335522A1 |
| Способ контроля профиля зубьев зубчатых колес | 1990 |
|
SU1733911A1 |
| Способ контроля зубчатых колес с внутренним зацеплением | 1988 |
|
SU1610233A1 |
| Способ обработки зубьев зубчатых колес дисковым лезвийным инструментом | 2021 |
|
RU2763831C1 |
| Способ определения кинематической погрешности зубчатых колес | 1984 |
|
SU1220425A1 |
| Способ контроля радиального биения зубчатого венца | 1987 |
|
SU1476303A1 |
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| Способ определения координат точеклиНии зАцЕплЕНия B пРибОРАХ для КОМп-лЕКСНОгО ОдНОпРОфильНОгО КОНТРОлязубчАТыХ КОлЕС | 1979 |
|
SU853361A1 |
Изобретение относится к машиностроению, а именно к средствам и методам контроля зубчатых колес. Цель изобретения - повьппение точности и расширение функциональных возможностей путем обеспечения контроля направления линии зуба н базового расстояния. Для осуществления способа используется звольвентомер, на котором контролируемое колесо устанавливается в расчетном исходном положенин. Сдвиг измерительного наконечника осуществляют до совпадения действительной и расчетной профилеграмм в двух крайних расчетных точках, а перед снятием повторной профштеграммы вводят поправку в осевое положение контролируемого колеса с учетом сдвига измерительного наконечника. В качестве эквидистантных используют профилеграммы, построенные по трем точкам, две из которых совпадают с контрольными, а третью выбирают между ними. Погрешность профиля определяют с учетом отклонения плоскости i контроля от нормали к поверхности зуба. Отклонение линии зуба опреде(Л ляют в момент касания измерительного наконечника эвольвентомера поверхности зуба в средней точке его сечения с учетом погрешности расположения точек действительной линии зуба на развертке базового конуса. Кроме того, Ю повьш1ение точности может быть достиг нуто путем введения поправки на погю решность базового расстояния. 1 з.п. ф-лы, 12 ил.
Радиус настройки эвольвентомера, Г,Е, , м«
Угол повогота колеса, ф. ,
Осевая установка L, мм
Угол наклона оси колеса, J5j° ,
Межосевое расстояние И,
Координаты средних точек сечений, ммХ
Проекции орта нормали, мм
/ei Z,i
0,626 0,530 0,709
0.544 0,584 0,503
-0,559 -0,615 0,494
| Dill Е | |||
| Messung von geradverzahnten kleinkegelradern | |||
| - Feingeratetechnik, 23, 6, 1974, 3,276270. |
