Изобретение относится к машиностроению и может быть использовано, в частности, в роботостроении.
Цель изобретения - повьшение быст- родействия механизма.
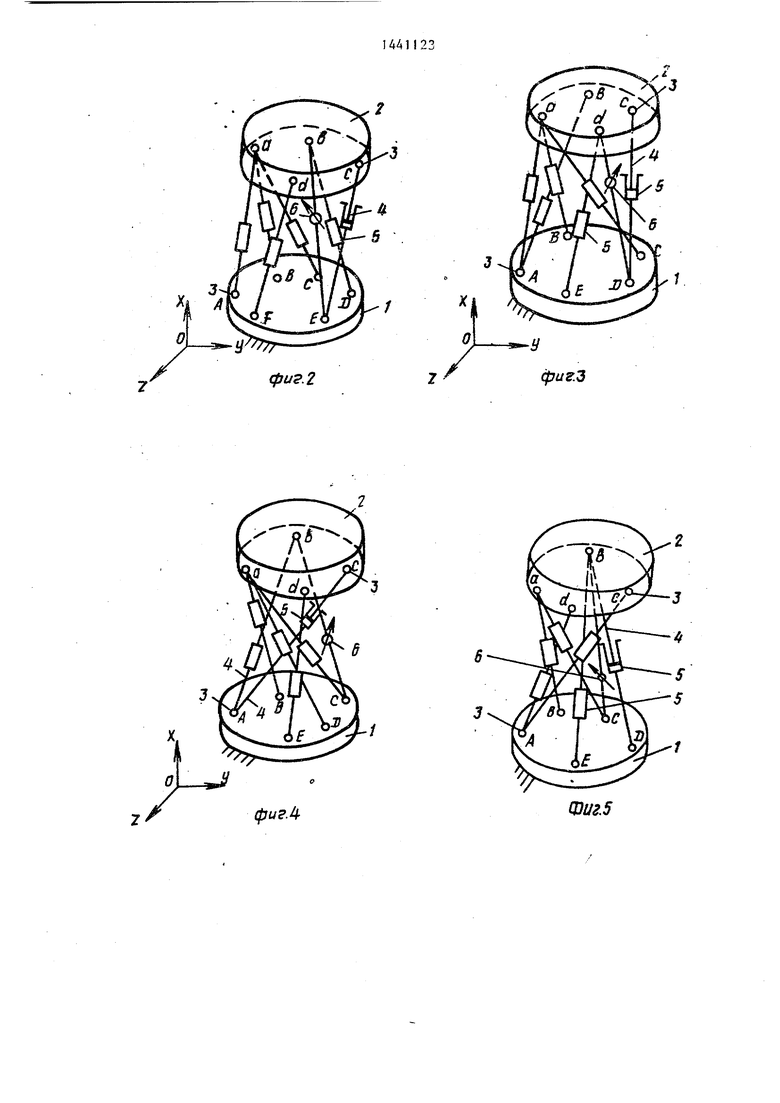
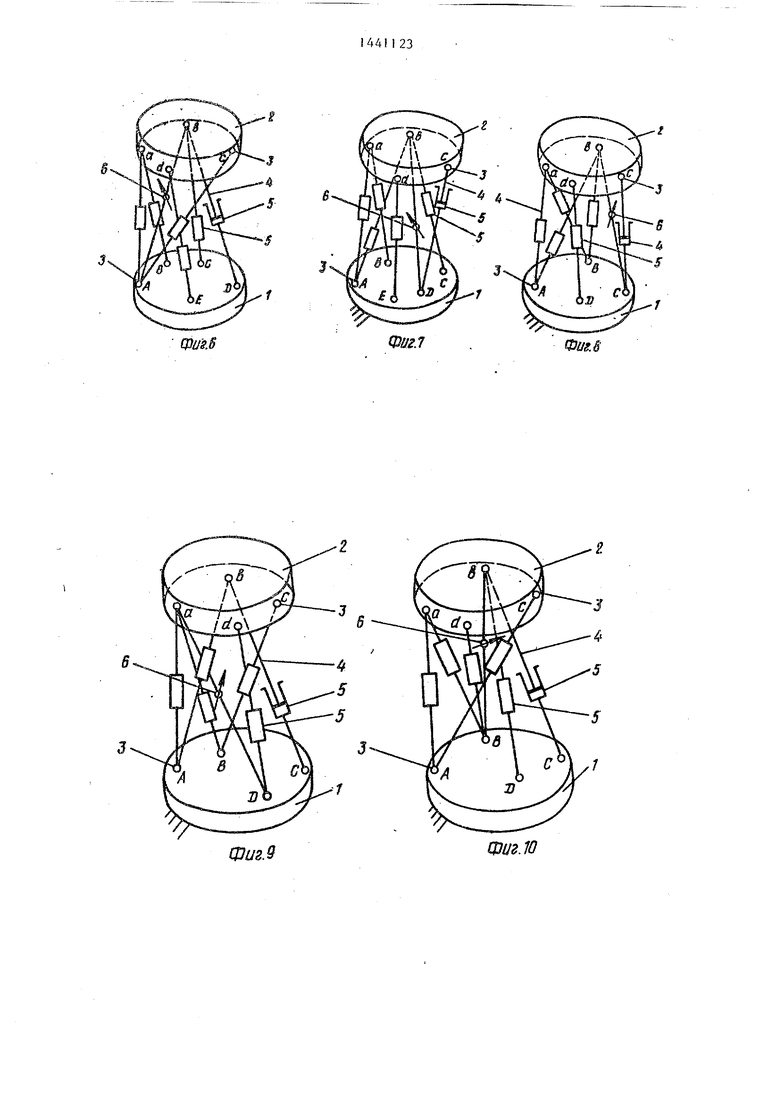
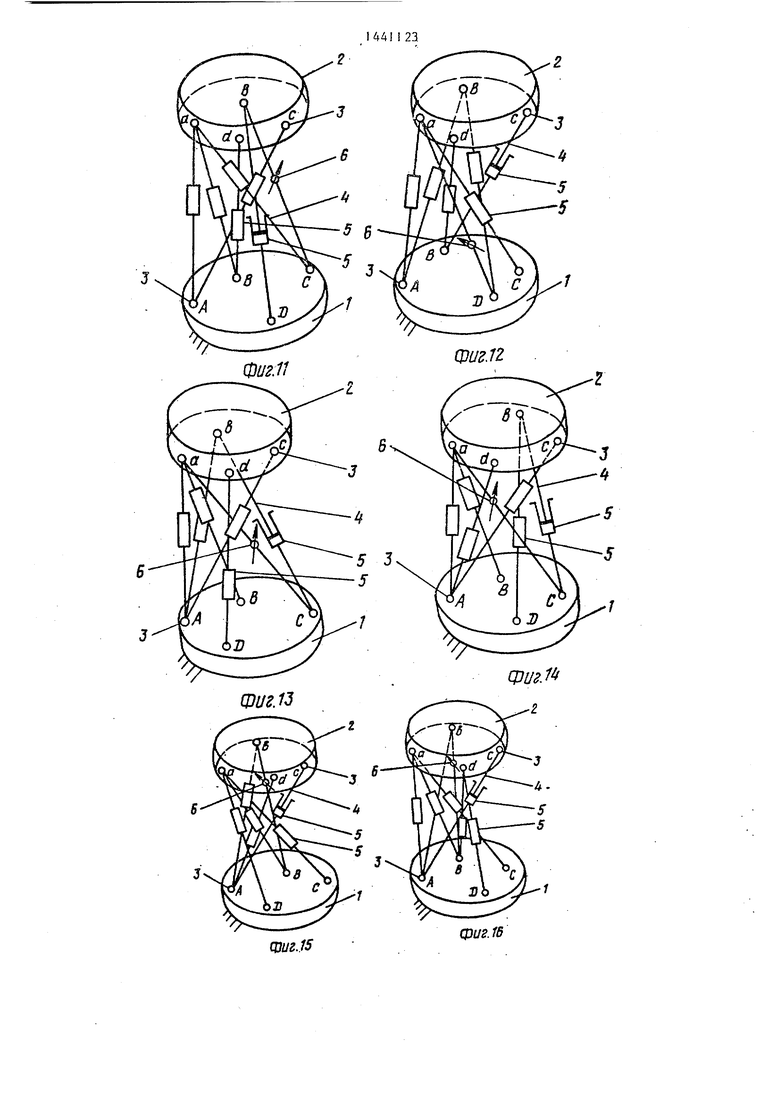
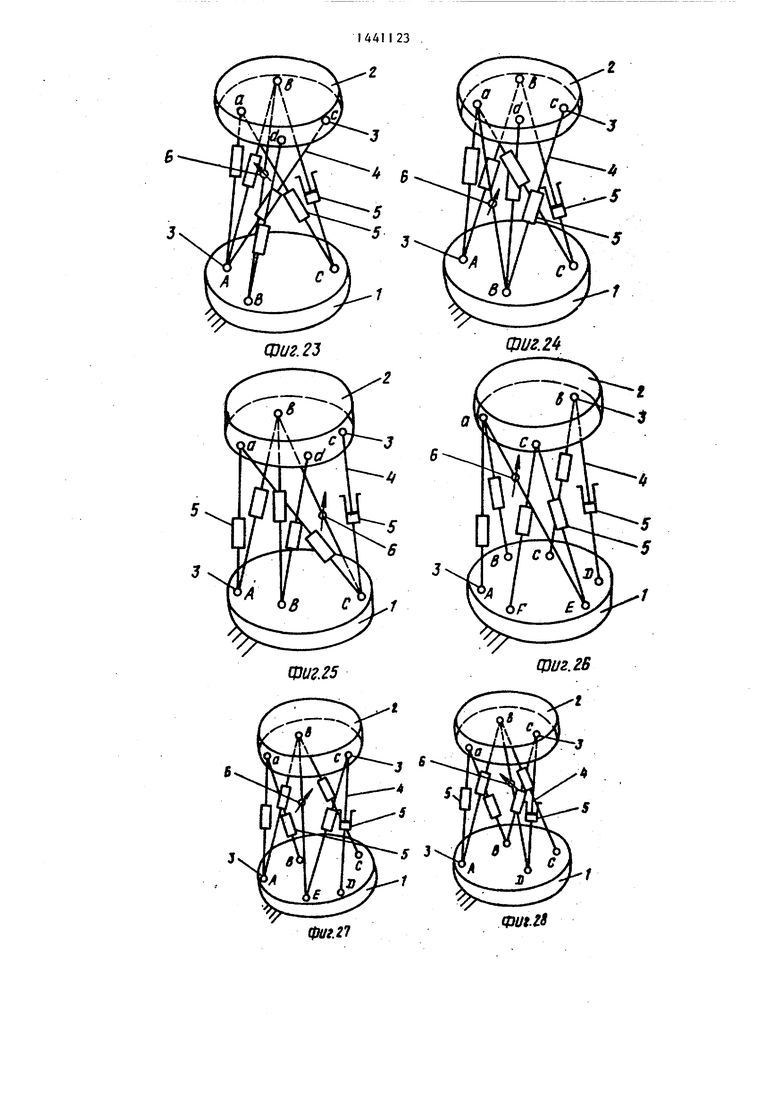
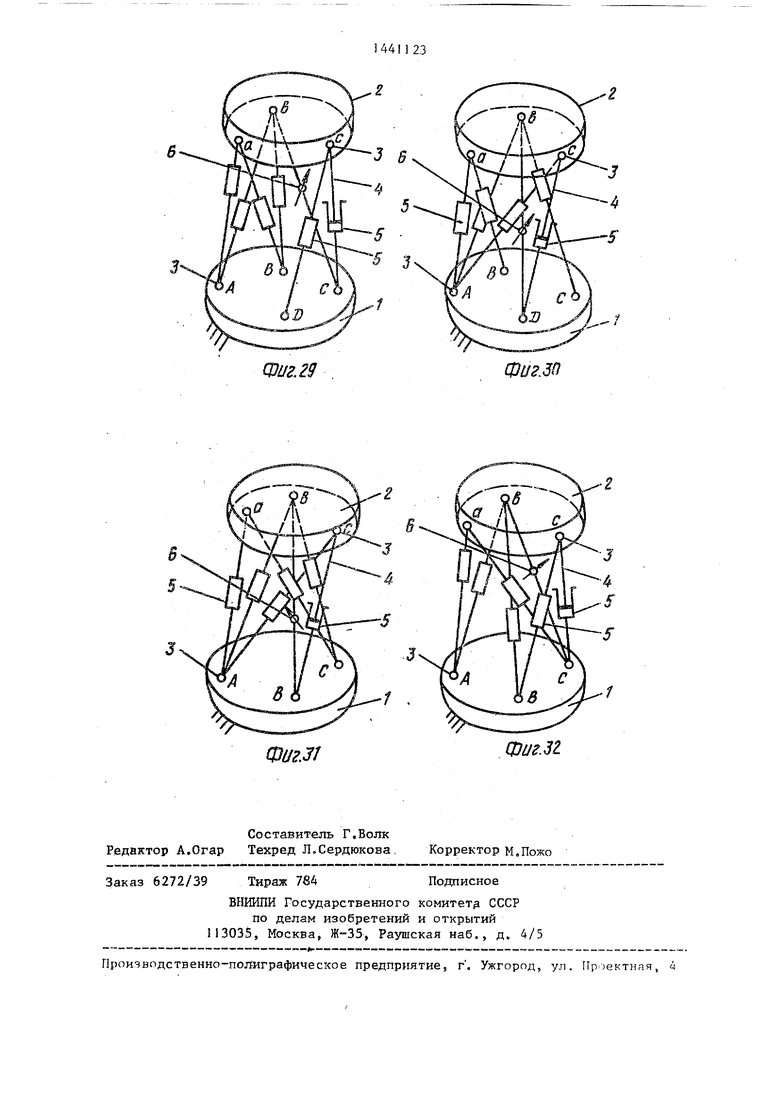
На фиг. 1-32 схематически изображен 1-координатный пространственный механизм, варианты исполнения.
Механизм состоит из основания 1 и подвижного звена 2, на которых размещены шарниры 3, через центры которых проходят оси шести тяг -4, снабженных регуляторами 5 длины. Число шарниров 3 подвижного звена 2 - три или четыре. Механизм снабжен измерителем 6 расстояния между центрами не соединенных тягой 4 одного шарнира 3 основания 1 и одного шарнира 3 подвижного звена 2, Оси измерителя 6 и оси тяг 4 расположены так, что через три шарнира 3 подвижного звена 2 проходят одна, две и три оси.
1-Координатный пространственный механизм работает следующим образом.
Для того, чтобЬт контролировать текущее положение подвижного звена 2, определяют координаты расположенных на нем шарниров 3 в неподвижной относительно основания 1 системе коорди- нат.
При этом в каждой из изображенных на фиг. 1-32-структур 1-координатного механизма измерителем 6 расстояния вьщеляют по числу шарниров 3 подвижного звена 2 три шти четыре тетраэдра и по известным координатам mapfoi- ров 3 основания 1, длинам тяг 4 и измеренной величине расстояния между шарйирами 3, основания 1 и подвижного звена 2, не соединенными тягой, последовательно определяют координаты центров шарниров 3 подвижного звена 2 в неподвижной системе координат. В механизме изображенном на фиг. 1, последовательно рассматриваются тетраэдры аАВЕ, bCDa, сРаЪ, dFac для определения соответственно координат точек а, Ъ, с, d на основании решения систем уравнений следующего вида:
r(X;-Xj%(Y;-YjS(Z,-Z«Nli |(Х;.Х„) -b(Yj-YjS(Z;-Z) l(Xj-X) (Y;-Yj +(Z;-Zj l
где (X,Y|,Z|) - искомые координаты точки a-jf или Ъ, или с, или d в зависимости от рассматриваемого тетраэдра;
(XK,, (x,Y«,z), (x,Y,z) координаты точек А, В, Е первого из рассматриваемых тетраэдров с, D, а - второго, РаЪ - третьего, Fac - четвертого тетраэдров;
1,1ц,1 - длины отрезков, соединяющих точку (X;, Y;,Z;) с (X,,Yk,Zj, (, (X,Y,Z) соответственно.
Формула изобретения
1-Координатный пространственный механизм, содержащий основание и подвижное звено, соединенные шарнирно с помощью шести тяг с соответствующими регуляторами их длины, при этом оси тяг проходят через центры трех или четырех шарниров подвижного звена, о т личающийся тем, что, с целью повышения быстродействия механизма, он снабжен измерителем расстояния между центрами одного из шарниров основания и одного из шарниров подвижного звена, которые не соединены тягой, а ось измерителя и оси тяг расположены так, что через шарниры подвижного звена проходят соответственно одна, две и три оси.
фи.2
фиг.З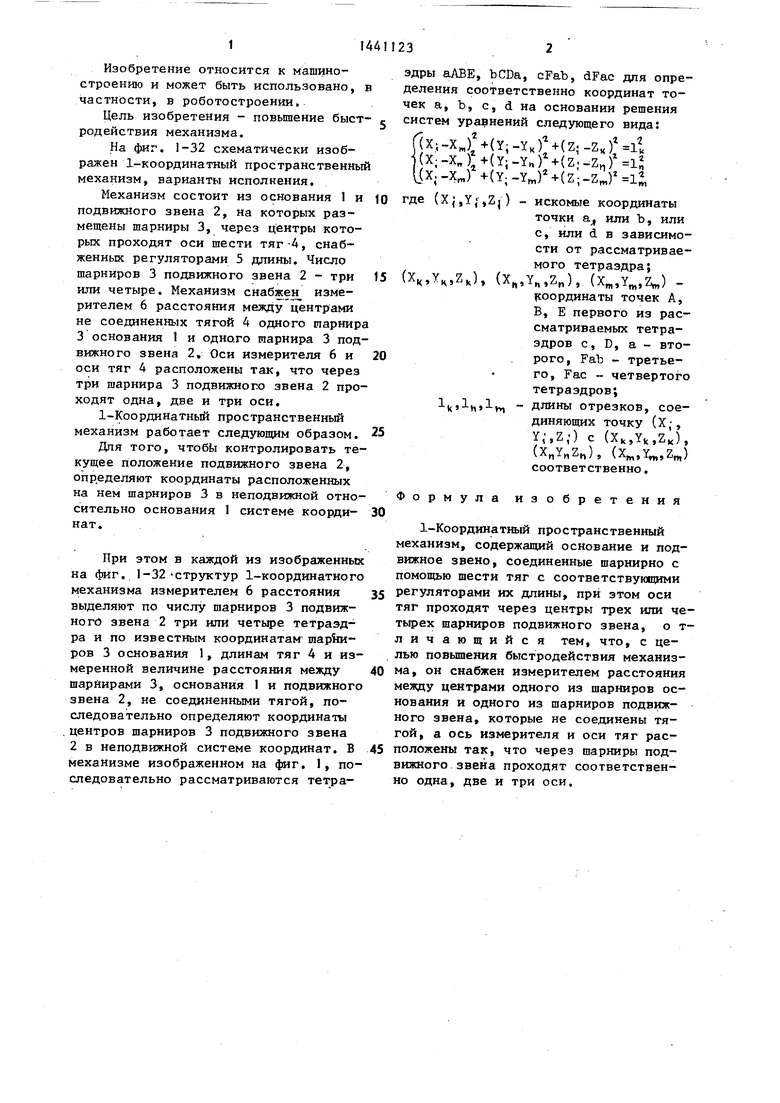
| название | год | авторы | номер документа |
|---|---|---|---|
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| L-координатный механизм | 1988 |
|
SU1563978A1 |
| Способ взаимного ориентирования осей вращения трех теодолитов | 1985 |
|
SU1318786A1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1303398A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОЗНОГО РАСПРЕДЕЛЕНИЯ В ОБЪЕКТЕ | 1989 |
|
SU1823194A1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство | 2018 |
|
RU2670142C1 |
| Способ определения погрешностей сборки редуктора | 1985 |
|
SU1464035A1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ТОЧЕК ОБЪЕКТА | 2000 |
|
RU2173445C1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |

Изобретение относится к машиностроению. Цель изобретения - повышение быстродействия механизма.Поставленная цель достигается тем, что 1-координатный пространственный механизм, содержащий основание 1 и подвижное звено 2, соединённые шестью тягами 4 с регуляторами их дпины 5, оси которых проходят через три или четыре шарнира 3 подвижного звена, -снабжен измерителем расстояния между центрами шарниров основания и подвижного звена, не соединенных тягой, при этом через три шарнира подвижного звена проходят соответственно одна, две и три оси тяг и измерителя. Определение текущих координат шарниров подвижного звена в неподвижной системе координат производится путем последова тельного решения систем из трех уравнений, связывающих коордннать: вершин и длины ребер трех или четырех тетра- здров, образуемых плоскостями,проходящими через оси тяг и измерителя, и отрезки, соединяющие центры ша.рни- ров основания и подвижного звена. 32 ил.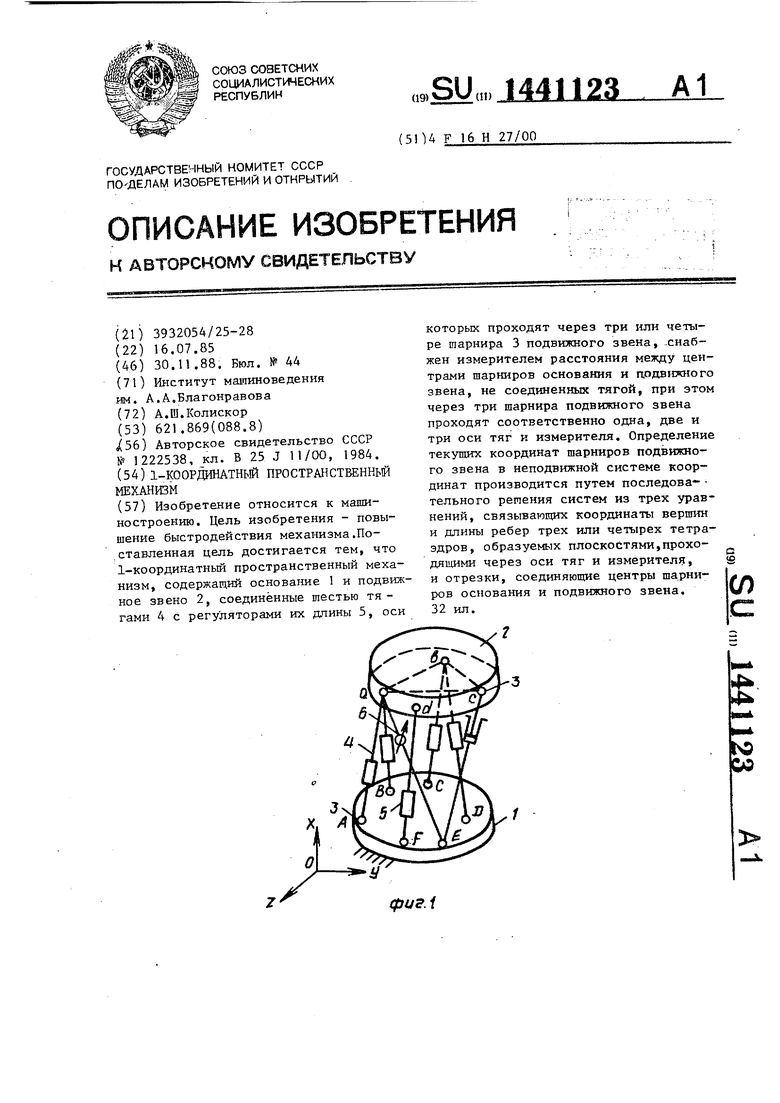
4-
Х фигЛ
Фиг.5
Физ.б
Фиг.9
Фиг.7
Фи«.§
Фиг.Ю
цзиг.15
фиг. f6
Cte W
WutSi
Фиг.20
Фи&гг
фиг.П
Фи1.18
Фиг. 29
Фиг.31
Фи2.3П
фигМ
| @ -Координатный пространственный механизм (его варианты) | 1984 |
|
SU1222538A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
