1 6
I /
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Привод вагонного генератора | 1983 |
|
SU1134444A1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2009 |
|
RU2405993C1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |

Изобретение относится к машиностроению и может быть использовано в робототехнике. Целью изобретения является улучшение динамических характеристик при одновременном упрощении обслуживания за счет снижения уровня шума и уменьшения инерционности подвижных звеньев. При включении основного привода 6 движение передается через ведущий шкив 9 на ведомый шкив 12 через ремень 13. Ведомое звено 2 при этом поворачивается относительно основания 1 вдоль продольной оси шарнира, в котором установлен волновой редуктор, генератор волн которого жестко связан с ведомым шкивом 12. Аналогично от дополнительных приводов 6-8 движение независимо передается на ведомые звенья 3 и 4 за счет ременных передач, которые имеют промежуточные сдвоенные шкивы, установленные подвижно на выходных валах предшествующих шарниров. Захватное устройство 5 манипулятора при этом занимает определенное положение в пространстве. 2 ил.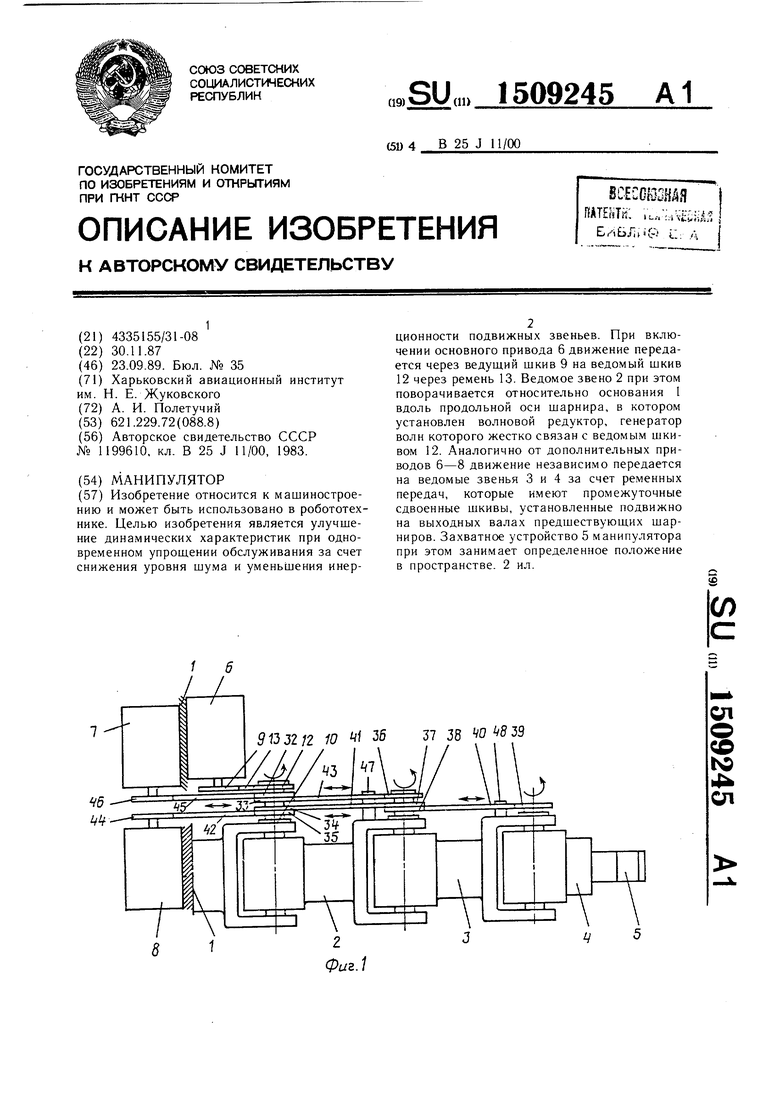
513J2/2 10 4i 36 37 38 W 39
5
8
2
Фиг.1
СП
о ;о
N9
4
сл
Изобретение относится к машиностроению и может быть иснользовано в робототехнике.
Целью изобретения является улучшение динамических характеристик при одновременном упрощении обслуживания за счет снижения уровня шума и уменьшения инерционности подвижных звеньев.
На фиг. 1 показана схема манипулятора с тремя шарнирами, вид сверху; на фиг. 2 - шарнир, соедипяюш.ий стойку с первым подвижным звеном, продольный разрез.
Манипулятор содержит основание 1 и шарнирно связанные с ним звенья 2-4. Со звеном 4 связано захватное устройство 5. На основании 1 установлены приводы 6-8. На валу основного привода 6 закреплен ве- дупи|й 1ПКИВ 9, а на цапфе 10, жестко свя- занпой с основанием 1, смонтирован на под- шигп1ике 11 ведомый шкив 12, связанный например, зубчатым ремнем 13 со шкивом 9. Шкив 12 посредством переходника 14 и вала 15 соединен с общим кулачком 16 генераторов 17 и 18 волн волного редуктора, установленных внутри гибкого зубчатого колеса 19, на которое снаружи насажено гибкое зубчатое колесо 20, имеющее такое же число зубьев, как и гибкое колесо 19, но отличающееся коэффициентом смешения зубьев. Генератор 17 волн предназначен для деформирования гибкого колеса 19 и взаимодействует с ним неподсредственно, а генератор 18 Bo:iH предназначен для деформирования гибкого колеса 20 и взаимодействует с ним через гладкую оболочку гибкого колеса 19. Оба гибких колеса 19 и 20 неподвижно связаны с валом 21 шарнира и за- цеплепы с жесткими колесами 22 и 23 соответственно, неподвижно закрепленными в расточке ведомого звена 2 шарнира. Вал 21 с одной стороны соединен с основанием 1, а с другой стороны онирается на него через подшипники 24 и 25 общего кулачка 16 генераторов волн и подшипник 26. На вал 21 ншрнира опирается через подшипники 27 и 28, общий кулачок 16 и подшипники 24 и 25 ведомое звено 2. С валом 21, а значит, и с гибкими колесами 19 и 20 связан статор 29 электромагнитной муфты-тормоза, якорь 30 которой шлицами 31 соединен с обш;им кулачком 16 генераторов волн.
Устройство всех шарниров манипулятора является аналогичным, отличие заклю- чается в количестве подшипников и шкивов на цапфе 10. Так, для первого шарнира, сое- диняюшего основание 1 и ведомое звено 2, на цапфе 10 смонтировано пять подшипников и соответственно пять шкивов 12 и 32- 35. Промежуточные шкивы 32 и 33, 34 и 35, имеют обшую ступицу, т.е. они сдвоены и вращаются с одинаковой частотой.
На цапфе следующего от основания 1 шарнира, т.е. соединяющего звенья 2 и 3,
смонтированы на подшипниковых опорах только три шкива 36-38. Причем шкив 36 является ведомым для этого шарнира и соединен с генераторами волн волнового редуктора, а шкивы 37 и 38 являются промежуточными. Цапфа третьего шарнира несет на себе только один подшипник и один ведомый шкив 39, связанный с генераторами волн волнового редуктора своего шарнира. Ведомый
шкив 39 ремнем 40 связан с промежуточным шкивом 38, смонтированным на цапфе предыдущего шарнира, имеюш,им обш,ую ступицу со шкивом 37 и связанным, в свою очередь, ремнем 41 со шкивом 34, имеющим общую ступицу со шкивом 35, связанным ремнем 42 со шкивом 44, насаженным на вал привода 8. Аналогично ведомый шкив 36 второго шарнира связан ремнем 43 со шкивом 33 первого шарнира, имеюшим обшую ступицу со шкивом 32, а последний связан
0 ремнем 45 с ведущим шкивом 46, насаженным на выходной вал дополнительного привода 7. На звеньях 2 и 3 закреплены дополнительно введенные кронштейны 47 и 48 с натяжными роликами (не показаны) для
5 натяжения ремней. Передаточное отношение всех ременных зубчатых передач равно единице, а подшипники, смонтированные на них шкивы, ремни имеют одинаковые параметры для всех ременных передач, что значительно упрошает и удешевляет конструк0 цию манипулятора.
Манипулятор работает следующим образом.
В исходном положении манипулятора, если он не нагружен полезной нагрузкой, его звенья удерживаются от перемещений с по5 мошью тормозов на постоянных магнитах, имеющихся в двигателях. При работе манипулятора все его шарниры могут включать-, ся одновременно или два из них, или один независимо от остальных. Например, для
0 поворота звена 2 относительно основания 1 на требуемый угол включается основной привод 6, вследствие чего получает вращение с частотой выходного вала привода ведущий щкив 9, приводящий во вращение через, ремень 13 ведомый щкив 12 и связанные с ним
переходник 14, вал 15 и общий кулачок 16 генераторов 17 и,18 волн, которые при вращении деформируют гибкие колеса 19 и 20. При этом зацепленные с ними жесткие колеса 22 и 23 получают замедленное вращение и
Q сообщают его связанному с ними ведомому звену 2, которое может поворачиваться в плоскости в любом направлении в зависимости от направления вращения вала привода. Для поворота на требуемый угол звена 3 относительно звена 2 включается дополни5 тельный привод 7, приводящий во вращение шкив 46 и через ремень 45 сдвоенные промежуточные щкивы 32 и 33, передающие вращение через ремень 43 на ведомый зубчатый 36 шарнира, соединяющего звенья 2 и 3. От шкива 36 осуществляется привод волнового редуктора аналогично предыдущему щарниру.
Для поворота на требуемый угол звена 4 относительно звена 3 включается привод 8, который через шкивы 44 и 35, 34 и 37, 38 и 39, связанные соответственно ремнями 42, 41 и 40, включает в работу волновой редуктор шарнира приводящий в движение звено 4.
Поворот подвижных звеньев 2-4 может осуществляться одновременно в одном или разных направлениях за счет реверсирования двигателей.
Если под нагрузкой необходимо надежно зафиксировать в требуемом положении ведомое звено, например 2, относительно основания 1, то на катущку обмотки возбуждения электромагнитной муфты подается напряжение, вследствие чего якрь 30, скользя по шлицам 31, притягивается к статору муфты и происходит соединение генераторов 17 и 18 волн с гибкими колесами 19 и 20, приводящее к потере волновым редуктором подвижности и к взаимной фиксации звеньев. Аналогично при включении электромагнитных муфт всех шарниров весь манипулятор превращается в неподвижное звено, т.е. стойку.
Предлагаемый манипулятор имеет модульную схему, состоит из набора одинаковых элементов и узлов, поэтому обладает простой, экономичной конструкцией. За счет применения точных регулируемых двигателей, бесшумных зубчатых ременных передач, допускающих высокие скорости, и волновых зубчатых передач с двумя гибкими колесами, обладающих высокой нагрузочной способностью и кинематической точностью и обеспечивающих малые габариты и массу шарниров, манипулятор может быть скоростным, а значит, и высокопроизводительным, имеет высокую точность позиционирования при минимальном числе датчиков, хорошую управляемость и бесшумность. При этом он прост для обслуживания и ремонта.
Формула изобретения
Манипулятор, содержащий основание с установленным на нем основным приводом,
кинематически связанным с механической рукой, состоящей из ведущих и ведомых звеньев, связанных между собой посредством щарниров, каждый из которых включает волновой редуктор с управляющим элементом,
0 входной вал которого кинематически связан с приводом и жестко связан с генератором волн, а выходной вал - с ведомым звеном, причем первое ведущее звено механической руки жестко связано с основанием, а последнее ведомое звено - с захватным устройством, отличающийся тем, что, с целью улучшения динамических характеристик при одновременном упрощении обслуживания за счет снижения уровня щума и уменьшения инерционности подвижных звеньев, он снаб0 жен дополнительными приводами, число которых равно числу шарниров, жестко установленными на основании и кинематически связанными при помощи дополнительно введенных ременных передач с входными валас ми соответствующих волновых редукторов, при этом дополнительно введенные ременные передачи имеют ведущие промежуточные и ведомые шкивы, причем ведущие шкивы этих передач жестко установлены на выходных валах основного и дополнительных при0 водов, промежуточные шкивы выполнены сдвоенными и подвижно расположены на входных валах волновых редукторов, кроме последнего, считая от основания, а ведомые шкивы жестко установлены на входных валах волновых редукторов, при этом ведомый
5 щкив первого после основания шарнира связан посредством ремня с ведущим шкивом основного привода, а все остальные ведомые шкивы связаны посредством ремней через соответствующие промежуточные шкивы с
Q ведушими шкивами, причем на всех ведущих звеньях жестко установлены дополнительно введенные кронштейны с натяжными роликами, которые кинематически связаны с соответствующим ремнем, связанным с ведомым щкивом.
QO
| Манипулятор | 1983 |
|
SU1199610A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
