7 3 8ГОП757
;о
со
Од
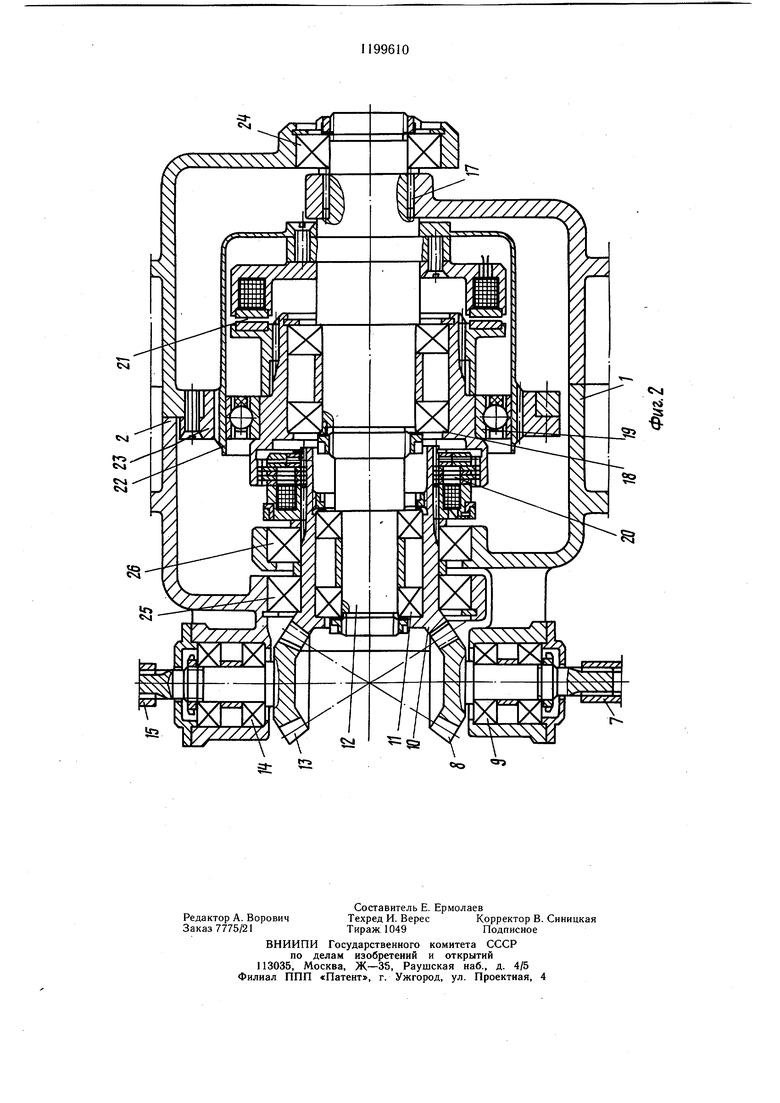
Фаг. 7 /ff Изобретение относится к машиностроению и может быть использовано в робототехнике. Целью изобретения является увели-чение грузоподъемности манипулятора путем уменьшения габаритов и массы шарниров, достигаемого установкой конических колес на быстроходных валах и ликвидацией редуктора между двигателем и первым шарниром. На фиг.1 показана кинематическая схема манипулятора; на фиг.2 - шарнир манипулятора в продольном разрезе, обший вид. Манипулятор содержит неподвижное звено 1, подвижные звенья 2-4 и схват 5. На основании 1 закреплен двигатель 6, связанный посредством торсионного вала 7 с ведущим зубчатым колесом 8 первого шарнира, соединяющего звенья 1 и 2. Зубчатое колесо 8 установлено на подшипниковых опорах 9 на звене 1 и зацепляется с ведомым зубчатым колесом 10, смонтированным на подшипниковых опорах И на валу 12 шарнира и зацепляющегося, в свою очерефь, с зубчатым колесом 13, установленным на подшипниках 14 на ведомом звене 2 и связанным с торсионным валом 15, соединенным с ведущим зубчатым колесом 16 следующего шарнира. На валу 12, жестко связанном шлицами 17 со звеном 1, смонтирован на подшипниковых опорах 18 генератор 19 волн с возможностью соединения при помощи электро.магнитной муфты 20 с ведомым зубчатым колесом 10, а при помощи электромагнитной муфты 21 - с валом 12 и связанным с .ним гибким колесом 22, зацепляющимся с жестким колесом 23, неподвижно закрепленным на ведомом звене 2, опирающимся через подшипниковые опоры 24 и 25, зубчатое колесо 10 и подшипники 11 на вал 12. В свою очередь, вал 12 имеет вторую опору на звено 2 через подшипники 11, зубчатое колесо 10 и подшипник 26. Оси шарниров (т.е. оси валов 12) могут
оыть расположены в одной плоскости, в перпендикулярных или в пересекающихся плоскостях, что расширяет зону достигаегиости манипулятора.
Манипулятор работает следующим образом.
В исходном положении манипулятора подается напряжение на катушки возбуждения электромагнитных муфт 21 и отключаются
или один из всех.
При повороте всех звеньев или одного из них в обратном направлении включаются электромагнитные муфты 20 и реверсируется вращение, двигателя 6. После этого производится отключение муфты 21 и включение муфт 20, чем сообщается генератору 19 волн обратное вращение, приводящее к реверсированию поворота ведомых звеньев. электромагнитные муфты 20 всех шарниров. При этом генераторы 19 волн соединяются с гибкими колесами 22, волновые редукторы заклиниваются, лишая возможности перемешения ведомых звеньев относительно ведуших и манипулятор превраш,ается в жесткую систему. При включении двигателя 6 получает враш,ение торсионный вал 7 и связанное с ним ведуш,ее зубчатое колесо 8, от которого враш,ение получают зубчатые колеса 10 и 13, торсионный вал 15 и ведущее зубчатое колесо 16 следуюш,его шарнира и т.д., т.е. одновременно получают вращение и вращаются при всех режимах работы манипулятора торсионные валы и зубчатые колеса всех шарниров. Для поворота всех звеньев 2-4 одновременно или только одного из них отклю.чаются все муфты 21 или одна муфта 21 и подается напряжение на обмотки катушек возбуждения муфт 20. Происходит соединение ведомого зубчатого колеса 10 и генератора 19 волн, вследствие чего он получает вращение. Вращаясь, генератор 19 волн деформирует гибкое колесо 22, которое сообщает вращение жесткому колесу 23, связанному с ведомым звеном 2, получающим поворотное движение в плоскости относительно звена 1. Если муфты 21 отключены во всех шарнирах, а муфты 20 включены во всех шарнирах, то одноверменно получают поворотное движение все ведомые звенья 2-4 и т.д. При включении в работу только одного шарнира или двух при неподвижных остальных щарнирах процесс проходит аналогично. При повороте звена 2 поворачивается и связанное с ним ведомое зубчатое колесо 13, что должно быть учтено при определении угловой скорости торсионного вала 15 и ведущего зубчатого колеса 16. Таким образом, при п.овороте всех звеньев в одном направлении одновременно могут работать или все шарниры, или несколько
CNJ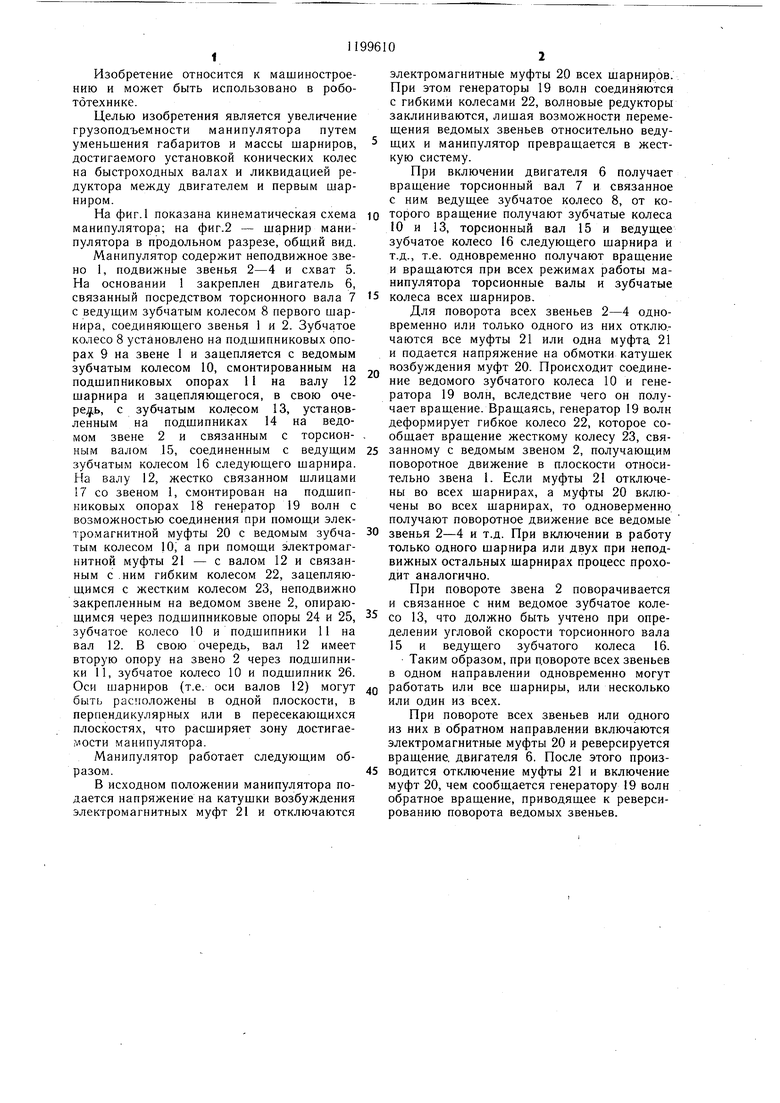
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Шарнир манипулятора Полетучего | 1980 |
|
SU885002A1 |
| Приводной сферический шарнир | 1989 |
|
SU1646863A1 |
| Шарнир манипулятора | 1980 |
|
SU882735A1 |
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Модуль промышленного робота | 1985 |
|
SU1294600A1 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
МАНИПУЛЯТОР, содержащий основание с установленным на нем двигателем, кинематически связанным с механической рукой, состоящей из звеньев, соединенных между собой шарнирами, каждый из которых включает волновой редуктор, коническую передачу с ведущим, промежуточным и ведомым колесами и управляющие элементы, причем первое звено механической руки связано с основанием, а последнее - с захватным устройством, и торсионные валы, отличающийся тем, что, с целью увеличения грузоподъемности манипулятора, управляющие элементы выполнены в виде электромагнитных муфт и установлены по две на валу, коаксиальном оси каждого щарнира, с возможностью соединения генератора волн с промежуточным колесом конической передачи, смонтированным на валу, коаксиальном оси щарнира, и с гибким колесо волнового редуктора, жесткое колесо которого жестко связано с ведомым звеном механической руки, а ведущее колесо конической передачи смонтировано на ведущем звене, при этом ведомое колесо конической передачи установлено на ведомом звене с возможностью взаимодействия с промежуточ® ным колесом, а конические передачи всех щарниров связаны между собой и с двигателем торсионными валами.
| Манипулятор | 1980 |
|
SU891425A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
