1
Изобретение относится к автоматизации добычи полезных ископаемых и может быть использовано при создании систем регулирования производительности драг.
i Цель изобретения - повышение точности определения производительности черпания при драгировании путем дополнительного учета соотноше- ния верхнего и нижнего продуктов грохочения.
Способ определения производительности черпания при драгировании включает измерение полезной мощности привода бочки и полезной мощности Привода транспортера. Последнюю пре- образуют в электрический сигнал, который сравнивают с электрическим сигналом, соответствующим удвоенной полезной мо1чности привода бочки, и ВЫ1 Ьабатывают разностный сигнал, велиCZ
f
чина которого пропорциональна производительности черпания, На фиг. I изображена схема устройства, поясняющего способ; на фиг. 2 - графическое пояснение способа определения производительности при ррагировании.
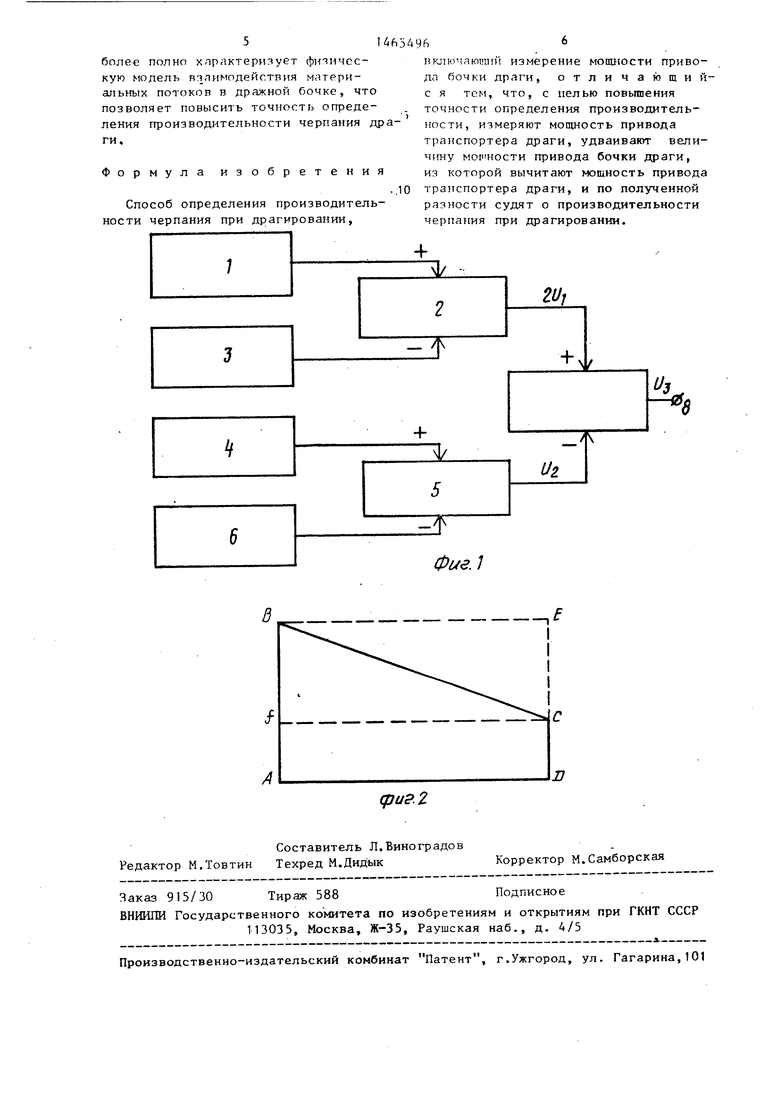
Отрезок АД на г. 2 соответствует длине бочки. Отрезок АВ соответствует величине поступающего объема горной массы через завалочный люк в бочку-. Отрезок СД - количество горной массы (верхний продукт), выходящий из бочки на транспортер (в отвал). Контур АВСД характеризует весь объем породы, находящийся в бочке, который определяет полезн то механическую мощность привода бочки, .равную разности между текущей мощностью и механической мощностью холостого хода. Контур ВЕС - объем
01
|i
;D о
3IA
вышедший из брчкн через перпороды
форированные листы на шлюзы, который в нагрузке бочки не участвует. Контур АГСД - объем породы, вышедший из бочки на транспортер, который определяет полезную механическую мощность привода транспортера, равную разности между текущей механической мощностью и механической мощностью холостого хода.
Если бы вся исходная горная масса проходила через бочку и выходила на транспортер, то производительность драги характеризовалась бы контуром АВЕД и соответственно полезной механической мощностью привода бочки. Но поскольку часть горной массы, характеризуемая контуром ВЕС, просеивается на щлюзы, следовательно, и не участвует в нагружении привода бочки, то в известных решениях о производительности черпания драги судят по полезной мощности привода бочки, т.е. по контуру АВСД,, При этом происходит неучет значительной части общего(объема горной массы (характеризуемой контуром ВЕС),обу- славливаюш 1Й низкую точность определения произво,цительности.
Учет этой массы можно произвести следующим образом.
Так как производительность черпания драги характеризуется площадью S прямоугольника АВЕД, состоящего из трапеции АВСД и треугольника ВЕС,
то
ВЕСПри. этом треугольник ВЕС треугольнику BCF, а площадь ника BCF можно определить ка
ДРСВ ВЕС
BCF
тогда
АЬСО
ABED ЛбСО A6CD PCI 2S :|gcD SApcD
Выражая площади геометрических фигур через соответствующие величины, получим
,.n,
где Q - производительность черпания драги, , Wj „- текущая полезная мощность
привода бочки, кВт; W - текущая полезная мощность
привода транспо зтера, кВт; К, К - коэффт1циенты пропорциональности, м /кВт-ч,
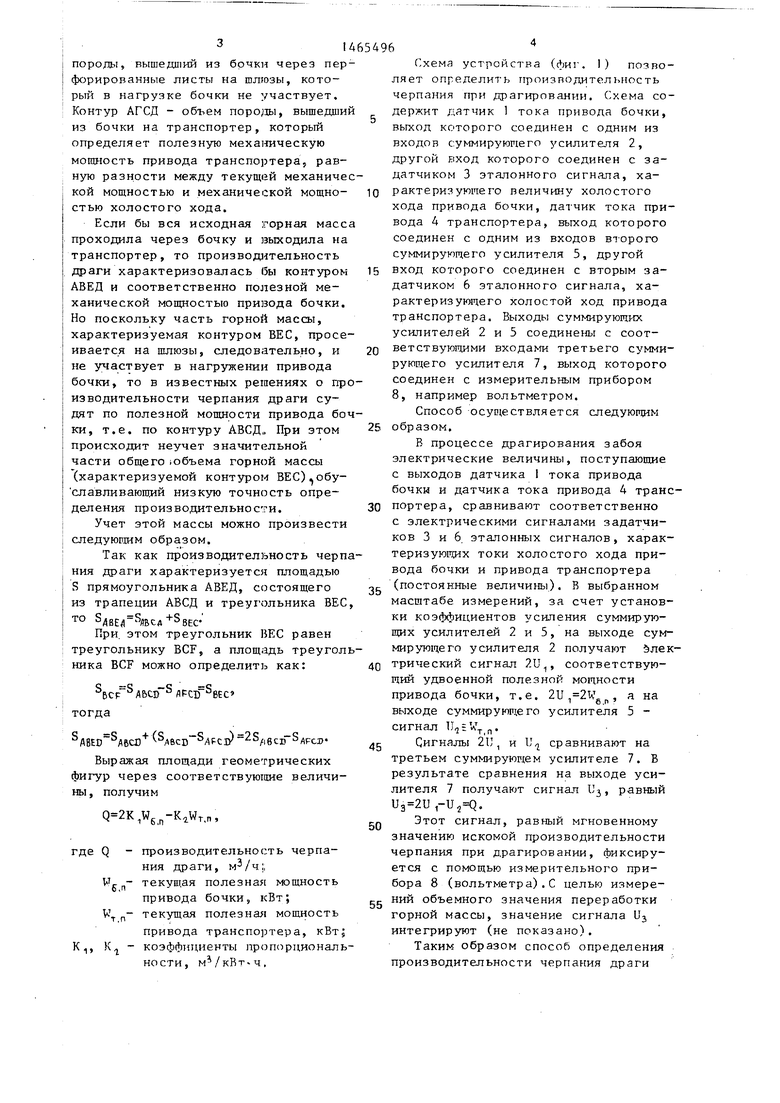
Схема устройства (фиг. ) позволяет определить гтронзподительность черпания при драгировании. Схема содержит датчик 1 тока привода бочки, выход которого соединен с одним из входов суммирующего усилителя 2, другой вход которого соединен с за- датчиком 3 эталонного сигнала, характеризуюиего величину холостого хода привода бочки, датчик тока привода 4 транспортера, выход которого соединен с одним из входов второго суммирующего усилителя 5, другой
вход которого соединен с вторым за- датчиком 6 эталонного сигнала, характер из укяде го холостой ход привода транспортера. Выходы суммирующих усилителей 2 и 5 соединены с соответствующими входами третьего суммирующего усилителя 7, выход которого соединен с измерительным прибором 8, например вольтметром.
Способ осуществляется следующим
образом.
В процессе драгирования забоя электрические величины, поступающие с выходов датчика 1 тока привода бочки и датчика тока привода 4 транспортера, сравнивают соответственно с электрическими сигналами задатчи- ков 3 и 6 эталонных сигналов, характеризующих токи холостого хода привода бочки и привода транспортера
(постоянные величины). В выбранном масщтабе измерений, за счет установки коэффициентов усиления суммирующих усилителей 2 и 5, на выходе суммирующего усилителя 2 получают йлектрический сигнал 2U, соответствующий удвоенной полезной мощности
5
привода бочки, т.е. 2U ,2Wg, а на выходе суммирующего усилителя 5 - сигнал U,€V.
Сигналы 2IJ, и и сравнивают на третьем суммирующем усилителе 7. В результате сравнения на выходе усилителя 7 получают сигнал U, равный U3 2U-U2 Q.
Этот сигнал, равный мгновенному значению искомой производительности черпания при драгировании, фиксируется с помощью измерительного прибора 8 (вольтметра).С целью измере- g НИИ объемного значения переработки горной массы, значение сигнала Uj интегрируют (не показано).
Таким образом способ определения производительности черпания драги
0
5I fi549fi
более полно характеризует фиянчсс- кую модель иплимодействия материальных потоков в дражной бочке, что позволяет повысить точность определения производительности черпания драги.
ч
Формула изобретения
Способ определения производительности черпания при драгировании,
0
iKjiK)4amirain измерение мощности привода бочки драги, о т л и чающий- с я тем, что, с целью повьппения точности определения производительности, измеряют мощность привода транспортера драги, удваивают вели- ч(шу моп ности привода бочки драги, из которой вычитают мощность привода транспортера драги, и по полученной разности судят о производительности черпания при драгировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Способ определения крепости грунта при драгировании | 1983 |
|
SU1129289A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Способ определения производительности черпания при драгировании | 1981 |
|
SU994628A2 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Устройство управления добычным комплексом драги | 1986 |
|
SU1434038A1 |
| Устройство управления процессом драгирования | 1987 |
|
SU1425273A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ЧЕРПАНИЯ ПРИ ДРАГИРОВАНИИ | 1971 |
|
SU299602A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Способ определения производитель-НОСТи чЕРпАНия пРи дРАгиРОВАНии | 1979 |
|
SU806818A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ЧЕРПАНИЯ ПРИ ДРАГИРОВАНИИ | 0 |
|
SU299602A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Цель изобретения - повьше- ние точности определения производительности черпания при драгировании путем дополнительного учета соотношения верхнего и нижнего продуктов грохочения | |||
| Измеряют мощность привода бочки драги и привода транспортера драги | |||
| Из удвоенной величины ьющности привода бочки вычитают мощность привода транспортера драги | |||
| Полученная разность пропорциональна производительности черпания при дра- гироватши | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
