1467005
15
25
Изобретение относится к конвейеро- троению, а именно к устройствам для павливания ленты конвейера в слуае ее обрьша, и может быть исполь овано на наклонньк конвейерах для дновременного улавливания одник стройством грузонесущей и холостой , етвей ленты конвейера.
Цель изобретения - повышение на- ежности работы путем одновременного лавливания рабочей и холостой ветвей
енты
На фиг. 1 изображено устройство для улавливания ленты конвейера в случае ее обрыва, вид сбоку на сЬиг, 2 - разрез на. фиг, U «а 3 узел установки оси подвески серег с закладными элементамиJ на Фиг, 4 - разрез Б-Б на фиг. 3. Устройство для улавливания ленты конвейера в случае ее обрыва состоит ,.r i жесткой рамы 1 , закрепленной на опорной, поверхности 2 конвейера З. На раме 1 смонтирован поворотный рычаг Л, размещенный под грузонесуш.еи вртвью .5 ленты и с зазором 6 относи- .г;льно нее. Рычаг 4 на раме 1 установлен с помощью оси. 7. На конце ры ;;ага 4. обращенном в сторону головной масти ;онвейера 3, закреплен фрикцион 5.ъм башмак 8 с наружной цилиндрической поверхностью выпуклой формы. На PpvroM конце рычага 4 установлены . гфотивовесы 9. Рычаг 4 в исходном положении зафиксирован стопором 1U. Над грузонесущей ветвью ленты Ь с зазором 11. допускающим свободный про- код ленты 5 с транспортируемым грузом 12 на раме 1 неподвижно закреплена фрикционная плита 13 криволинейной формы, вогнутой стороной обращенная к грузонесущей ветви 5 ленты конвеие ра, фрикционная плита 13 имеет про- . фи-пь, совпадающими с профилем фрикци- онного башмака 8
На поворотном рычаге 4 закреплена лополнитальная фрикционная лента 14 кривоо1инейной формы, обращенная выпуклостью вниз. Плита 14 установлена с зазором 15 над холостой ветвью 1Ь ленты конвейера. На рычаге 4 с помощью шарнира 17 подвешены две серьги 18 охватывающие холостую ветвь Ib HeUic зазорами 19. Серьги 18 в своей нижней части соединены горизон тальной балкой 20, размещенной с зазором 21 под холостой ветвью 16 лен ты Бапка 20 имеет выпуклую цилинд30
5
30
35
40
рическую поверхность 22, обращенную к холостой ветви ленты.
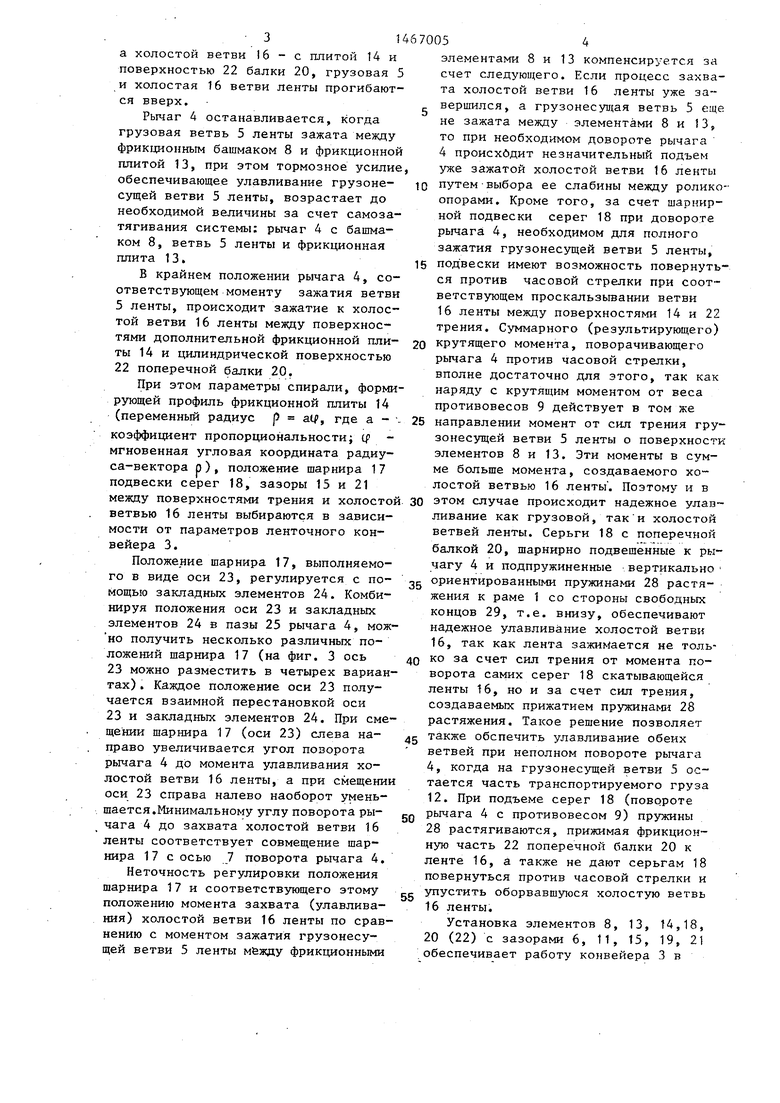
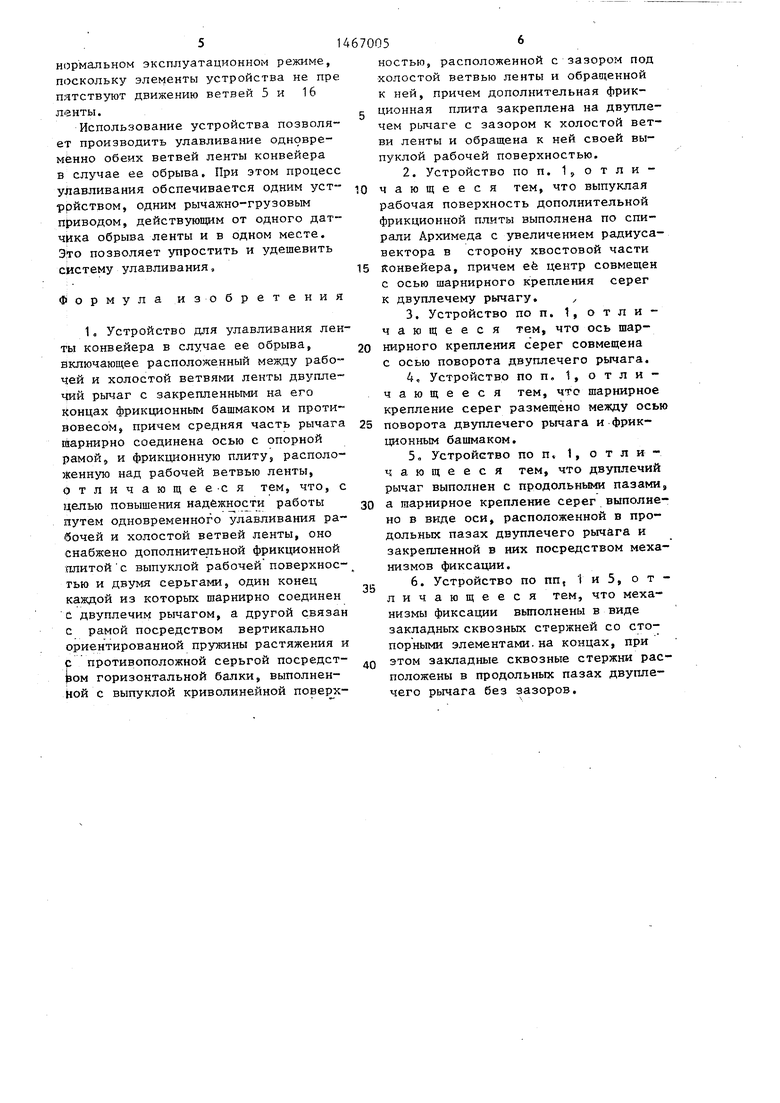
Профиль фрикционной плиты 14 выполнены по спирали Архимеда с центром спирали, совпадающем с осью шарнира 17 подвески серег 18, и увеличением радиуса-вектора р при-его вращении в сторону хвостовой части конвейера. Шарнир 17 подвески серег 18 может быть размещен мевду осью 7 поворота рычага 4 и фрикционным бащмаком 8. Шарнир 17 подвески серег 18 может быть выполнен в виде оси 23, размещенной в продольных ирореэях рычага 4 с возможностью фиксации. Ось 23 с& per 18 может быть фиксирована с по- МОШ.ЫО механизма фиксации в виде закладных элементов 24, вьшолненных в виде сквозных стержней, размещенных в продольны/, пазах 25 рычага « снабженных стопорными элементами 26 . и 27 на концах. Серьги 18 с поперечной балкой 20, шарнирно подвешенные к,, поворотному рычагу 4, следует подпружинить ориентированными вертикальными пружинами 28 растяжения к раме 1 со стороны свободного конца 29,
т.е. внизу.
Устройство работает следующим образом.
При обрыве ленты конвейера ее гру- зонесуи ая ветвь 5 и холостая ветвь 16 под действием составляющей силы тяжести начинают двигат ся вниз по роликоопорам. От датчика обрыва ленты (не показан) срабатывает стопор 10 Рычаг 4 освобождается и под действием веса противовесов 9 начинает поворачиваться против часовой стрелки При этом фрикционный башмак В входит в контакт с двигающейся вниз грузонесущей ветвью 5 ленты, а дополнительная фрикционная плита 14 и балка 20 - с холостой ветвью 16 ленты. . фрикционная плита 14 входит в контакт с холостой ветвью 16 ленты за счет спирального, профиля плиты 14, а балка 20 своей цилиндрической поверхностью 22 - за счет подъема точки i подвеса серег 18 - шарнира 17 повороте рычага 4 против часовой
стрелки.,
При дальнейшем повороте рычага ч под действием крутящего момента, соз- 3 даваемого противовесами 9, а также разности между моментами сил трения, возникающими .по поверхностям контакта грузонесущей ветви 5 с башмаком 8,
3
а холостой ветви 16 - с плитой 14 и поверхностью 22 балки 20, грузовая 5 и холостая 16 ветви ленты прогибаются вверх.
Рьпаг 4 останавливается, когда грузовая ветвь 5 ленты зажата между фрикционным башмаком 8 и фрикционной плитой 13, при этом тормозное усилие, обеспечивающее улавливание грузоне- сущей ветви 5 ленты, возрастает до необходимой величины за счет самозатягивания системы: рьтаг 4 с башмаком 8, ветвь 5 ленты и фрикционная плита 13.
В крайнем положении рычага 4, соответствующем моменту зажатия ветви 5 ленты, происходит зажатие к холостой ветви 16 ленты между поверхностями дополнительной фрикционной плиты 14 и цилиндрической поверхностью 22 поперечной балки 20.
При этом параметры спирали, формирующей профиль фрикционной плиты 14 (переменный радиус р аср, где а - - коэффициент пропорциональности; (f - мгновенная угловая координата радиуса-вектора р), положение шарнира 17 подвески серег 18, зазоры 15 и 21 между поверхностями трения и холостой ветвью 16 ленты выбираются в зависимости от параметров ленточного конвейера 3.
Положение шарнира 17, выполняемо14670054
элементами 8 и 13 компенсируется за счет следующего. Если процесс захва та холостой ветви 16 ленты уже за- g вершился, а грузонесущая ветвь 5 ещ не зажата между элементами 8 и 13, то при необходимом довороте рычага 4 происхйдит незначительный подъем уже зажатой холостой ветви 16 ленты 10 путем-выбора ее слабины между ролик опорами. Кроме того, за счет шарнир ной подвески серег 18 при довороте рычага 4, необходимом для полного зажатия грузонесущей ветви 5 ленты, 15 подвески имеют возможность повернуть ся против часовой стрелки при соответствующем проскальзьшании ветви 16 ленты между поверхностями 14 и 22 трения. Суммарного (результирующего) 20 крутящего момента, поворачивающего рычага 4 против часовой стрелки, вполне достаточно для этого, так как наряду с крутящим моментом от веса противовесов 9 действует в том же 25 направлении момент от сил трения гру зонесущей ветви 5 ленты о поверхност элементов 8 и 13. Эти моменты в сумме больше момента, создаваемого холостой ветвью 16 ленты . Поэтому и в 30 этом случае происходит надежное улан лизание как грузовой, так и холостой ветвей ленты. Серьги 18 с поперечной балкой 20, щарнирно подвешенные к ры чагу 4 и подпружиненные вертикально
. J «-mii-ak «lui , J.J4, 1 rirVClJl ij П
ГО в виде оси 23, регулируется с по- ориентированными пружинами 28 растяМППТТЧТП Чя Vrr Tttrt TV orT v iiLrmi- T3 О ,fi,-, .
мощью закладных элементов 24. Комбинируя положения оси 23 и закладных элементов 24 в пазы 25 рычага 4, мож- но получить несколько различных положений шарнира 17 (на фиг. 3 ось 23 можно разместить в четырех вариантах) . Каждое положение оси 23 получается взаимной перестановкой оси 23 и закладных элементов 24. При смещении шарнира 17 (оси 23) слева направо увеличивается угол поворота рычага 4 до момента улавливания холостой ветви 16 ленты, а при смещении оси 23 справа налево наоборот уменьшается.Минимальному углу поворота рычага 4 до захвата холостой ветви 16 ленты соответствует совмещение шарнира 17с осью 7 поворота рычага 4. Неточность регулировки положения шарнира 17 и соответствующего этому положению момента захвата (улавливания) холостой ветви 16 ленты по сравнению с моментом зажатия грузонесущей ветви 5 ленты мЬжду фрикционными
жения к раме 1 со стороны свободных концов 29, т.е. внизу, обеспечивают надежное улавливание холостой ветви 16, так как лента зажимается не толь- 40 ко за счет сил трения от момента поворота самих серег 18 скатывающейся ленты 16, но и за счет сил трения, создаваемых прижатием пружинами 28 растяжения. Такое решение позволяет
45 также обспечить улавливание обеих ветвей при неполном повороте рычага 4, когда на грузонесущей ветви 5 остается часть транспортируемого груза 12. При подъеме серег 18 (повороте
gQ рычага 4 с противовесом 9) пружины 28 растягиваются, прижимая фрикционную часть 22 поперечной балки 20 к ленте 16, а также не дают серьгам 18 повернуться против часовой стрелки и
55 упустить оборвавшуюся холостую ветвь 16 ленты.
Установка элементов 8, 13, 14,18, 20 (22) с зазорами 6, 11, 15, 19, 21 .обеспечивает работу конвейера 3 в
,
4670054
элементами 8 и 13 компенсируется за счет следующего. Если процесс захвата холостой ветви 16 ленты уже за- g вершился, а грузонесущая ветвь 5 еще не зажата между элементами 8 и 13, то при необходимом довороте рычага 4 происхйдит незначительный подъем уже зажатой холостой ветви 16 ленты 10 путем-выбора ее слабины между ролике- опорами. Кроме того, за счет шарнирной подвески серег 18 при довороте рычага 4, необходимом для полного зажатия грузонесущей ветви 5 ленты, 15 подвески имеют возможность повернуться против часовой стрелки при соответствующем проскальзьшании ветви 16 ленты между поверхностями 14 и 22 трения. Суммарного (результирующего) 20 крутящего момента, поворачивающего рычага 4 против часовой стрелки, вполне достаточно для этого, так как наряду с крутящим моментом от веса противовесов 9 действует в том же 25 направлении момент от сил трения грузонесущей ветви 5 ленты о поверхности элементов 8 и 13. Эти моменты в сумме больше момента, создаваемого холостой ветвью 16 ленты . Поэтому и в 30 этом случае происходит надежное улан- лизание как грузовой, так и холостой ветвей ленты. Серьги 18 с поперечной балкой 20, щарнирно подвешенные к рычагу 4 и подпружиненные вертикально
. J «-mii-ak «lui , J.J4, 1 rirVClJl ij П
ориентированными пружинами 28 растя ориентированными пружинами 28 растя .
жения к раме 1 со стороны свободных концов 29, т.е. внизу, обеспечивают надежное улавливание холостой ветви 16, так как лента зажимается не толь- 0 ко за счет сил трения от момента поворота самих серег 18 скатывающейся ленты 16, но и за счет сил трения, создаваемых прижатием пружинами 28 растяжения. Такое решение позволяет
5 также обспечить улавливание обеих ветвей при неполном повороте рычага 4, когда на грузонесущей ветви 5 остается часть транспортируемого груза 12. При подъеме серег 18 (повороте
Q рычага 4 с противовесом 9) пружины 28 растягиваются, прижимая фрикционную часть 22 поперечной балки 20 к ленте 16, а также не дают серьгам 18 повернуться против часовой стрелки и
5 упустить оборвавшуюся холостую ветвь 16 ленты.
Установка элементов 8, 13, 14,18, 20 (22) с зазорами 6, 11, 15, 19, 21 .обеспечивает работу конвейера 3 в
нормальном эксплуатационном режиме, поскольку элементы устройства не пре пятствуют движению ветвей 5 и 16
ленты.
Использование устройства позволяет производить улавливание одновременно обеих ветвей ленты конвейера в случае ее обрыва. При этом процесс улавливания обспечивается одним уст- ррйством, одним рычажно-грузовым приводом, действующим от одного датчика обрыва ленты и в одном месте. Это позволяет упростить и удешевить систему улавливания,
Формула и 30 бретения
1, Устройство для улавливания ленты конвейера в случае ее обрыва, включающее расположенный между рабочей и холостой ветвями ленты двуплечий рычаг с закрепленными на его концах фрикционным башмаком и противовесом, причем средняя часть рычага шарнирно соединена осью с опорной рамой, и фрикционную плиту, расположенную над рабочей ветвью ленты, отличающее-с я тем, что, с целью повышения надёжности работы путем одновременного улавливания рабочей и холостой ветвей ленты, оно снабжено дополнительной фрикционной :гшитой с выпуклой рабочей поверхностью и двумя серьгами, один конец каждой из которых шарнирно соединен U двуплечим рычагом, а другой связан с рамой посредством вертикально ориентированной пружины растяжения и с противоположной серьгой посредст- ом горизонтальной балки, выполненной с выпуклой криволинейной поверх4670056
ностью, расположенной с зазором под холостой ветвью ленты и обращенной к ней, причем дополнительная фрикционная плита закреплена на двуплечем рычаге с зазором к холостой ветви ленты и обращена к ней своей выпуклой рабочей поверхностью.
2. Устройство по п. 1s. отли- 10 чающееся тем, что выпуклая рабочая поверхность дополнительной фрикционной плиты выполнена по спирали Архимеда с увеличением радиуса- вектора в сторону хвостовой части 15 конвейера, причем её центр совмещен с осью шарнирного крепления серег к двуплечему рычагу. ,
3.Устройство по п. 1, отличающееся тем, что ось шар20 нирного крепления серег совмещена с осью поворота двуплечего рычага.
4,Устройство по п. 1, отличающееся тем, что шарнирное крепление серег размещено между осью
25 поворота двуплечего рычага и фрикционным башмаком.
5« Устройство по п. 1, отличающееся тем, что двуплечий рычаг выполнен с продольными пазами,
30 а шарнирное крепление серег выполнено в виде оси, расположенной в продольных пазах двуплечего рычага и закрепленной в них посредством механизмов фиксации.
6. Устройство по пп, 1 и 5, отличающееся тем, что механизмы фиксации вьтолнены в виде закладных сквозных стержней со сто- пор ными элементами, на концах, при
40 этом закладные сквозные стержни расположены в продольных пазах двуплечего рычага без зазоров.
35
S-Б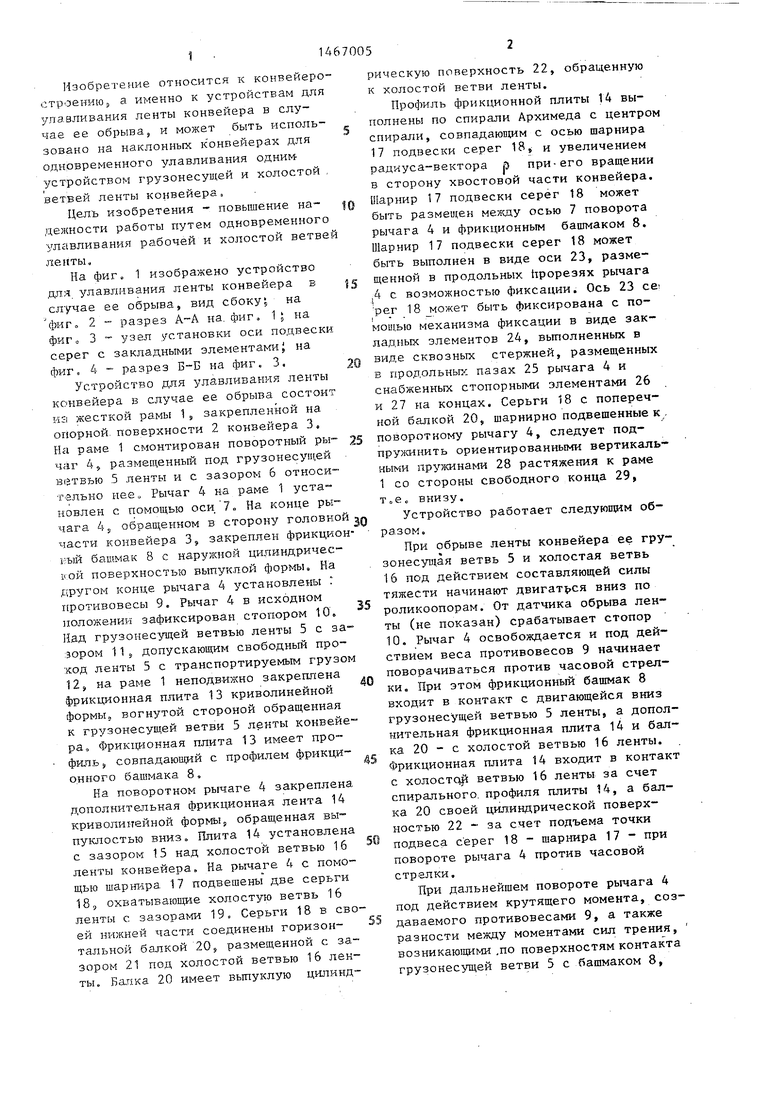
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1988 |
|
SU1590423A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| ЛОВИТЕЛЬ ЛЕНТЫ КОНВЕЙЕРА | 1991 |
|
RU2030345C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1997 |
|
RU2130888C1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ В СЛУЧАЕ ЕЕ ОБРЫВА | 1992 |
|
RU2043284C1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2352510C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЛЕНТЫ КОНВЕЙЕРА В СЛУЧАЕ ЕЕ ОБРЫВА | 1991 |
|
RU2043283C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПРИСПОСОБЛЕНИЯМИ ДЛЯ УЛАВЛИВАНИЯ ЛЕНТЫ | 1992 |
|
RU2019481C1 |
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342301C1 |
Изобретение относится к конвейе- ростроению и .повышает надежность ра- .боты устр-ва путем одновременного улавливания рабочей и холостой ветвей ленты. Устр-во для улавливания ленты конвейера в случае ее обрыва включает расположенный между рабочей и холостой ветвями ленты двуплечий рычаг (Р) 4 и фрикционную плиту СФП) а 13, расположенную над рабочей ветвью J ленты на раме t. На одном конце F , обращенном в сторону головной части конвейера 3, закреплен фрик- ционный башмак 8 с наружной цилиндрической поверхностью выпуклой формы. На другом конце Р 4 установлены противовесы 9. На двуплечем Р 4 закреплена дополнительная ФП 14 с зазором 15 к холостой ветви 16 конвейера. На Р 4 с помощью шарнира подвешены две серьги, соединенные в низкней части горизонтальной балкой 20. При обрыве .ленты срабатывает стопор 10. При этом Р 4 поворачивается под действием противовесов 9. Фрикционный башмак 8 входит в контакт- с грузонесущей ветвью 5 ленты, а дополнительная ФП 14 и балка 20 - с холостой ветвью 16 ленты. Когда грузовая ветвь 5 ленты будет зажата между фрикционным башмаком 8 и ФП 13, остановится Р 4. В крайнем положении Р 4 произойдет зажатие холостой ветви 16 меяоду ФП 141 и поперечной поверхностью балки 20. 5 з.п. ф-лы, 4 ил. ff 5 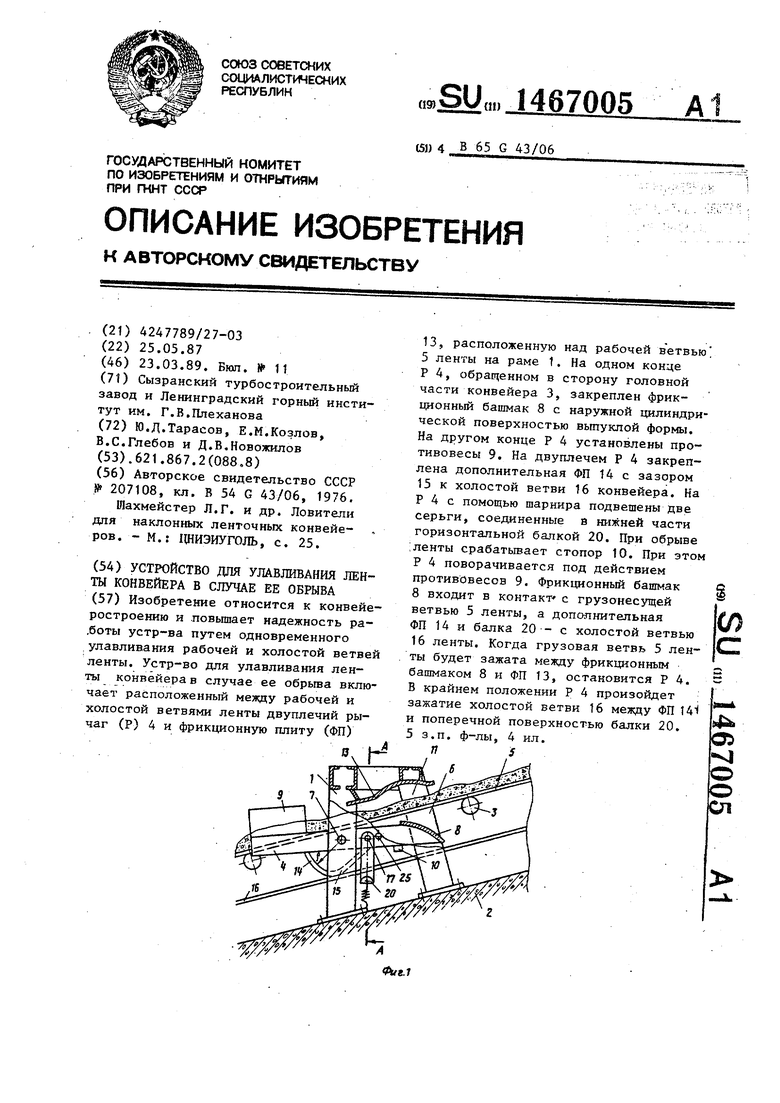
Фие.З
Редактор И.Шулла
Фи- г.
Составитель М.Ляпина
Техред М.Ходанич Корректор Л.Пилипенко
27
у&
