t
Изобретение относится к землеройным машинам и может быть использовано в качестве сменного оборудования дня производства земляных работ, в стесненных условиях, в частности, на .реконструкции действующих промьшшен- ных предприятий.
Целью изобретения является расширение технологических возможно/стей за счет обеспечения поворота ковша в стесненных условиях.
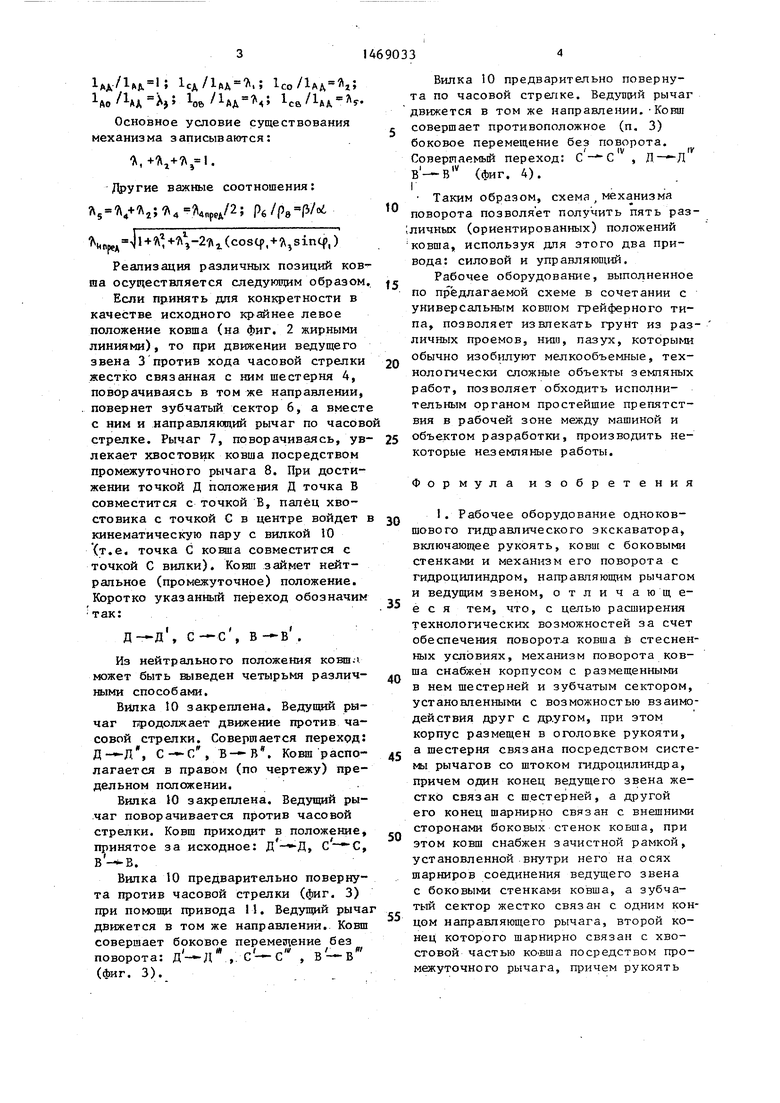
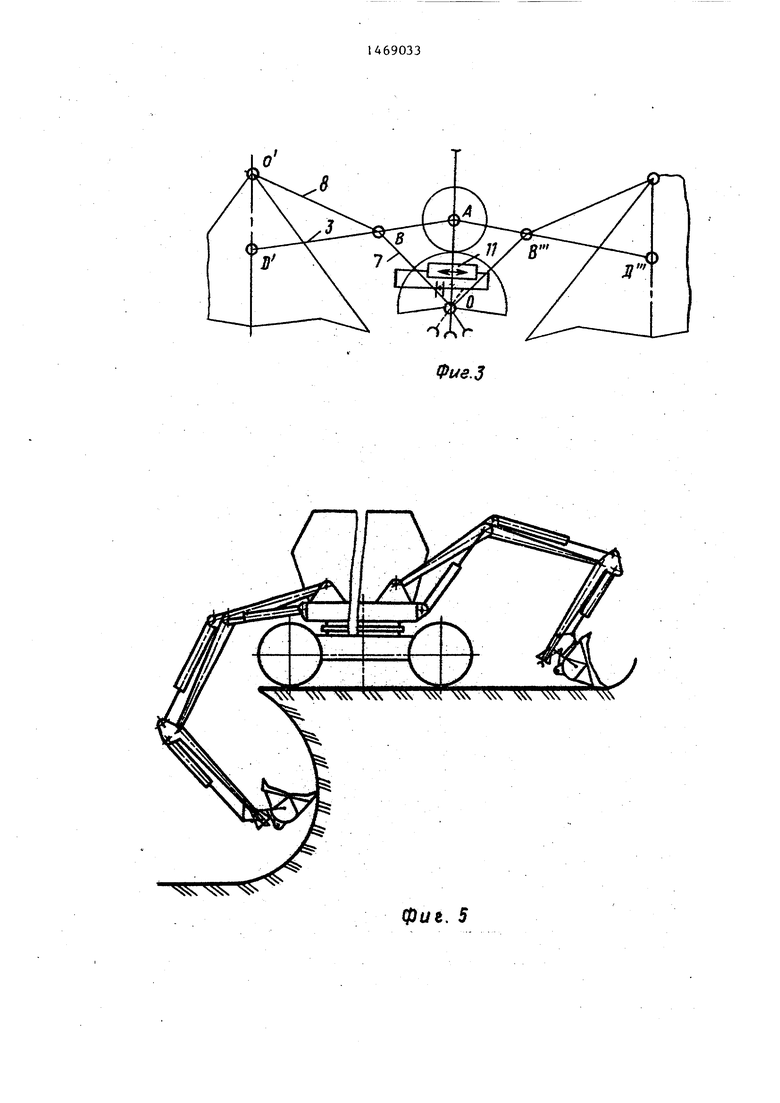
На фиг. 1 изображено рабочее оборудование, оснащенное ковшом, общий вид; на фиг. 2 - кинематическая схем механизма поворота ковша в трех ос- новных позициях; на фиг. 3 - то же, в двух дополнительных позициях; на фиг. 4 - общая кинематическая схема .рабочего оборудования; на фиг. 5 - технологическая схема копания одно- временно на двух уровнях с одной установки экскаватора; на фиг. 6 - экскаватор в режиме манипулятора.
, Рабочее оборудование включает ков 1, в полости которого шарнирно уста- новлена зачистная рамка 2 (фиг. 4) таким образом, что центр ее поворота совпадает с центром кривизны днища корпуса ковша. Плоскость рамки располагается в плоскости ведущего рычага 3, внутри его контура и жестко скрепляется с ним посредством, цапф шарнира поворота, выходящих на боковины конпа. Таким образом, рама ведущего рычага и зачистная рамка образуют единую конструкцию, что обеспечивает достаточную жесткость
всей системе и позволяет производить автоматическую очистку ковша при его Повороте относительно ведущего рычага. Второй конец ведущего звена 3 жестко соединяется с шестерней 4 механизма поворота (фиг. 2 и 4),установленной с возможностью вращения в корпусе 5 и входящей в зубчатое за- цеплейие с зубчатым сектором 6, шарнирно установленным в том же корпусе.
К центральному валу сектора жест- ко крепится направляющий рычаг 7, который посредством промежуточного рычага 8 шарнирно связан с хвостовой частью корпуса ковша. В торцовой части рукояти 9 и соосно с ней установлена упорная вилка 10, которая в зависимости от требований, предъявляемых к функциональным возможностям оборудования, может быть установлена жестко, либо с возможностью поворота вокруг поперечной оси и снабжена индивидуальным приводом 11 (фиг. 3).
В первом случае реализуются три щ едельных позиции ковша (фиг. 2), во втором - пять (фиг. 2 и 3). Шесте ня 4 может быть различными способами соединена со штоком силового гидроцилиндра 12 (например, на фиг. 4 - посредством рычагов 13-15). Основные соотношения параметров механизма в безразмерных единицах. Для этого разделяют все линейные параметры на длину одного из них, например звена АД. Тогда имеем:
IAA/IA U IcA/lftA.; 1со/1АА г;
IAO/IAA X,; ice/lAA Основное условие существования механизма записываются:
-А,+ A.. важные соотношения:
A5 V 2; A4 4np.A/2; Рб/Р8 Р/°
t,ftpeA |l V -27 i(cosCf, + i,sinCf,)
Реализация различных позиций ковша осуществляется следуют 1м образом
Если принять для кон1фетности в качестве исходного крайнее левое положение ковша (на фиг, 2 жирными линиями), то при движении ведущего звена 3 против хода часовой стрелки жестко связанная с ним шестерня 4, поворачиваясь в том же направлении, повернет зубчатый сектор 6, а вмест с ним и направляющий рычаг по часов стрелке. Рычаг 7, поворачиваясь, ув лекает хвостовик ковша посредством промежуточного рычага 8. При достижении точкой Д положения Д точка В совместится с точкой В, палец хвостовика с точкой С в центре войдет кинематическую пару с вилкой Ш (т.е. точка С конпа совместится с точкой С вилки). Ковш займет нейтральное (промежуточное) положение. Коротко указанный переход обозначим так:
Д-д . С-с , В .
Из нейтрального положения ковш.- , может быть Нзшеден четырьмя различ- ными способами.
Вилка 10 закреплена. Ведущий рычаг щзодолжает движение против часовой стрелки. Совершается переход: д-д, , В-В. Ковш распо- лагается в правом (по чертежу) предельном положении.
Вилка 10 закреплена. Ведущий ры- .чаг поворачивается против часовой стрелки. Ковш приходит в положение принятое за исходное: , ,
в - В.
Вилка Ш предварительно повернута против часовой стрелки (фиг. 3) при помоши привода 11. Ведущий рыча движется в том же направлении. Ковш совершает боковое переме дение без поворота: д -Д ,. с -с , в --в (фиг. 3).
Вилка 10 предварительно повернута по часовой стрелке. Ведупсий рычаг движется в том же направлении.-Ковш совершает противоположное (п. 3) боковое перемещение без поворота.
Совершаемый переход: С в -в (фиг. 4).
с Д-Д
o
0 5 о
Q
дЗ
„
,
Таким образом, схема, механизма поворота позволяет получить пять раз- ;личных (ориентированных) положений ковша, используя для этого два привода: силовой и управляющий,
Рабочее оборудование, выполненное по предлагаемой схеме в сочетании с универсальным ковшом грейферного типа, позволяет извлекать грунт из различных проемов, ниш, пазух, которыми обычно изоб1шуют мелкообъемные, технологически сложные объекты земляных работ, позволяет обходитъ исполнительным органом простейшие препятствия в рабочей зоне между машиной и объектом разработки, производить некоторые неземляные работы.
Формула изобретения
1. Рабочее оборудование одноковшового гидравлического экскаватора, включающее рукоять, ковш с боковыми стенками и механизм его поворота с гидроцилиндром, направляюш;им рычагом и ведущим звеном, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения поворота ковша в стесненных условиях, механизм поворота ковша снабжен корпусом с размещенными в нем шестерней и зубчатым сектором, установленными с возможностью взаимодействия друг с др.угом, при этом корпус размещен в оголовке рукояти, а шестерня связана посредством систе- мы рычагов со штоком гидроцилиндра, причем один конец ведущего звена жестко связан с шестерней, а другой его конец шарнирно связан с внешними сторонами боковых стенок ковша, при этом ковш снабжен зачистной рамкой, установленной внутри него на осях шарниров соединения ведущего звена с боковыми стенками ковша, а зубчатый сектор жестко связан с одним концом направляющего рычага, второй конец которого шарнирно связан с хвостовой частью кО Вша посредством промежуточного рычага, причем рукоять
имеет устанрвленную в ее торцовой части упорную вилку.
2. Рабочее оборудование по п. 1, отличающееся тем, что упорная вилка установлена с возможностью образования незамкнутой кинематической пары с осью шарнира соединения промежуточного рычага с хвостовой частью ковша.
3. Рабочее оборудование по п. 1, отличающееся тем, что упорная вилка установлена с возможностью ограниченного поворота относительно поперечной оси.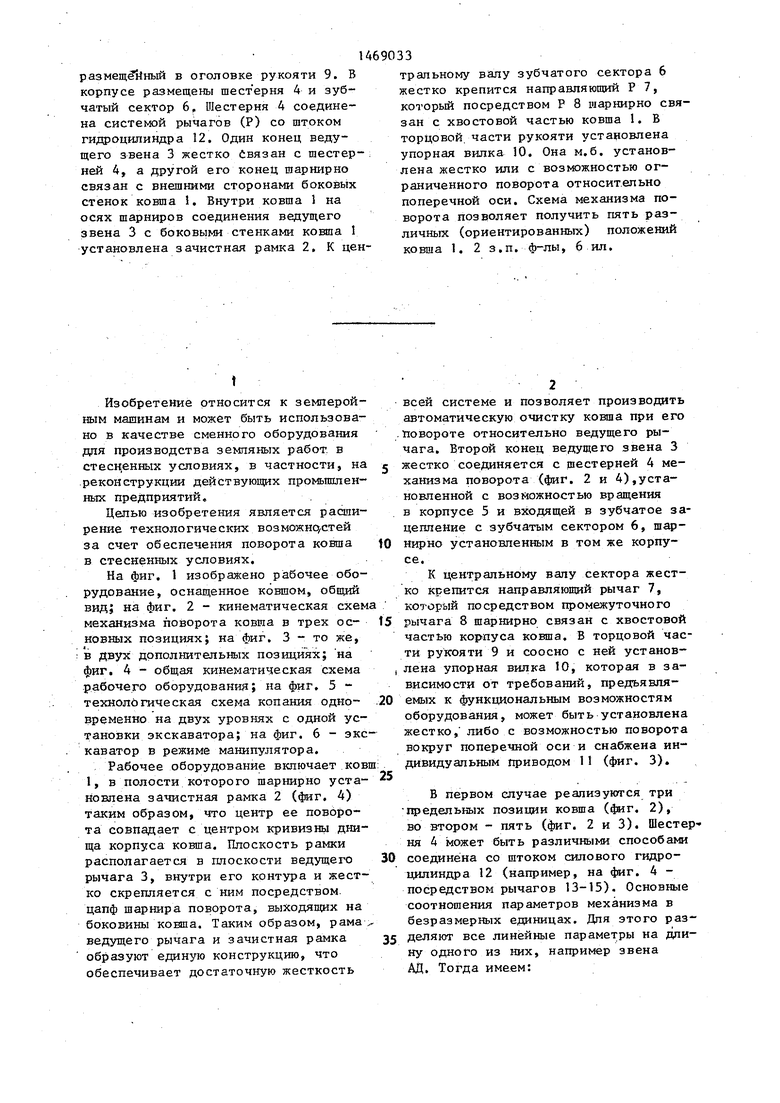
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ КРЫШЕК РАЗГРУЗОЧНЫХ ЛЮКОВ ВАГОНА-ХОППЕРА | 2008 |
|
RU2375221C1 |
| Рабочее оборудование одноковшового экскаватора | 1987 |
|
SU1506032A1 |
| Одноковшовый экскаватор с обратной лопатой | 1983 |
|
SU1164369A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1986 |
|
SU1432143A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU238413A1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| Механизм управления гидравлическим экскаватором | 1982 |
|
SU1027352A1 |

Изобретение относится к землеройным малинам. Цель - расширение технологических возможностей за счет обеспечения поворота ковша в стесненных условиях. Рабочее оборудование одноковшового гидравлического экскаватора включает рукоять 9, ковш 1 и механизм поворота ковша 1. Последний включает ведущее звено 3 и корпус.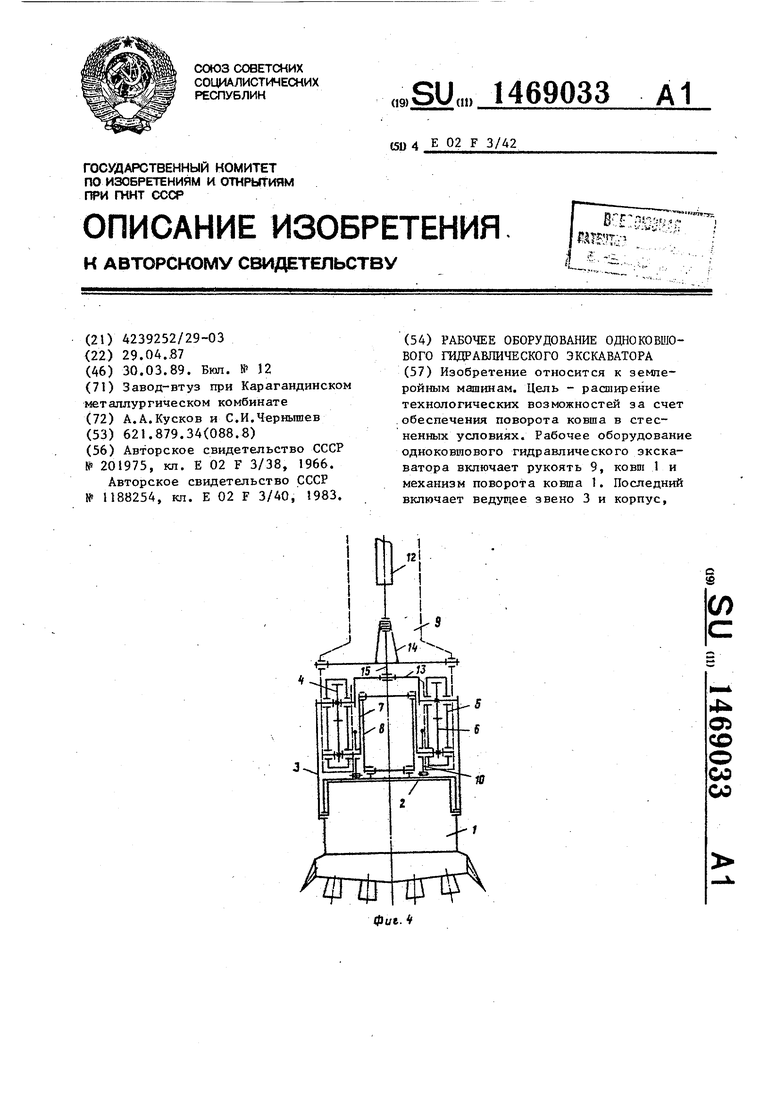
Фи&.2
N
Фие.З
ф4/е. 5
Фиг.б
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU201975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
