Известные гироскопические указатели азимута, содержащие гироскоп с горизонтально расположенной осью ротора, торсионный подвес гироузла к следящей раме, следящую систему и индукционный датчик, не обеспечивают высокой точности определения азимутального положения объекта.
В предлагаемом указателе повышение точности определения азимутального положения объекта достигнуто тем, что кожух гироскопа связан с наружным кольцом плоскими пружинами. На оси наружного кольца установлены принудительно вращаемые .вокруг свои.х осей щесть роликов, по три у каждого конца вертикальной оси. Ролики расположены один по отношению к другому под углом 120° и прижаты к цилиндрическим полуосям наружного кольца. Подобная установка роликов компенсирует моменты трения.
Для предотвращения образования на цилиндрической оси лунок платформы, на которых укреплены ролики, снабжены приводом для принудительного вращения вокруг цилиндрических осей Чтобы создать одинаковые моменты вокруг полуосей наружной рамки от силы трения роликов, один верхний и один нижний ролики должны быть прижаты к полуосям регулируемыми пружинами, а для трения роликов оси их должны быть наклонены к образующей цилиндра на такой угол, чтобы вектор результирующей скорости роликов относительно цилиндра совпадал с его образующей. Демпфирование колебаний оси ротора в азимуте происходит в силу того, что следящая система выполнена запаздывающей (скорость ее отработки пропорциональна ynv рассогласования между ней и гироскопом).
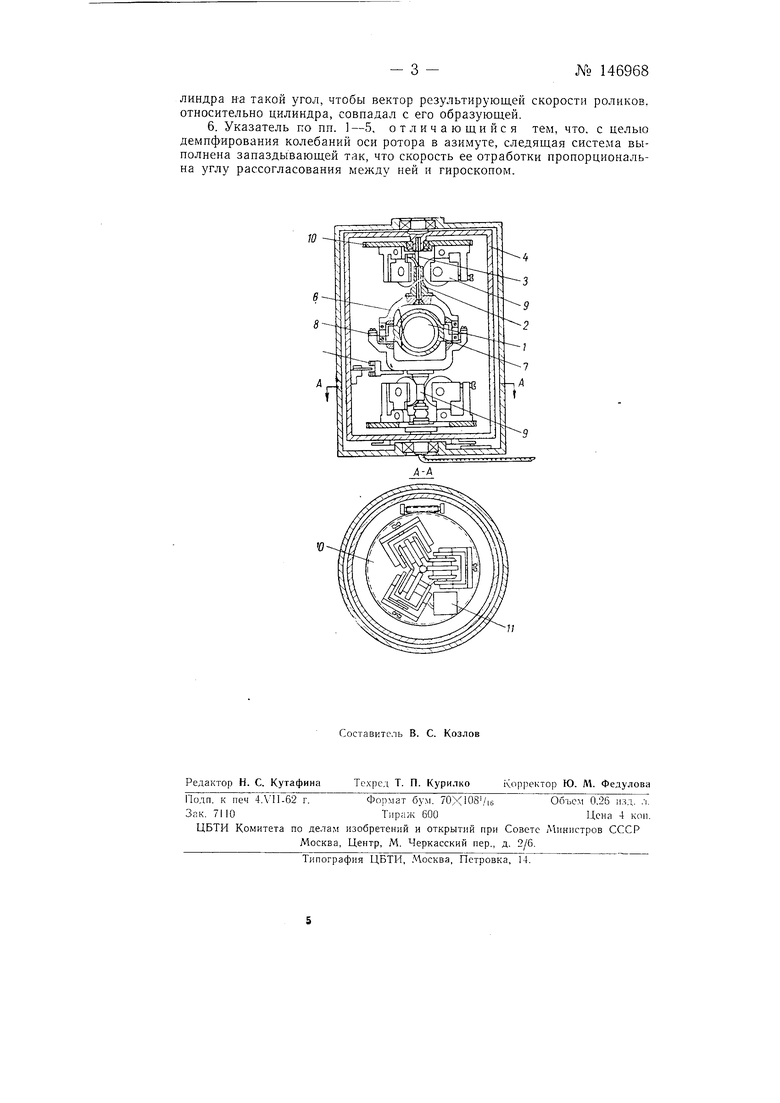
На чертеже приведена конструкция описываемого устройства
Гироскопический указатель азилгута содержит riipocKon с г тизон тально расположенной осью /. Ось -2 наружного кольца установлена
№ 146968- 2 вертикально, и весь Г| роузел подвешен ка торсионе 3, Bepxiinii конец которого, укрепленный в следящей раме 4, имеет возможность свободно поворачиваться iBOKpyr вертикальной оси и с помощью индукционного датчика 5, размещенного на наружной рамке 6 гирокомпаса, следить за положением последнего. Кожух 7 гироскопа с помощью плоских пружин 8 связан с наружным кольцом, что повыщает точность опреде ления азимутального положения исследуемого объекта. Для ко.мпенсации мо.ментов трения на оси 2 наружного кольца установлены принудительно вращаемые вокруг своих осей шесть роликов 9, по три у каждого конца вертикальной оси. Ролики 9 расположены один по отнощению другого под угло.м 120° и прижаты к цилиндр ическим полуосям наружного кольца. Регулируя силы поджатия роликов 9, добиваются такого положения, чтобы моменты трения, накладываемые верхними л нижни.ми роликами, были равны и взаимно компенсировались. .
Ролики 9 укреплены на платформах 10, снабженных приводо.м //, служащим для принудительного вращения в разные стороны с малой одинаковой постоянной угловой скоростью вокруг цилиндрических осей, вследствие чего устраняется возможность образования на цилиндрической оси 2 лунок, создающих дополнительные вредные момешы. Создание одинаковых моментов вокруг полуосей наружного кольца от силы трения роликов 9 достигнуто тем, что один .верхний и один нижний ролики прижаты к полуосям регулируемыми пружинами, не указанными ва чертеже.
В качестве варианта компенсации действия моментов трения верхних и нижних роликов предложено оси роликов 9 наклонять к образующим цилиндра на такой угол, чтобы вектор результирующей скорости роликов относительно цилиндра совпадал с его образующей. Для демпфирования колебаний оси ротора в азимуте с;1едящая систе.ма предложенного устройства выполнена запаздывающей так, что скорости ее обработки пропорциональны углу рассогласования между ней и гироскопом.
Предмет изобретения
1.Гироскопический указатель азимута, содержащий гироскоп с горизонтально расположенной ОСЬЕО ротора, торсионный подвес гироузла к следящей раме, следящую систему и индукционный датчик, отличающийся тем, что, с целью повыщения точности определения азимутального положения объекта, кожух гироскопа связан с наружным кольцом плоскими пружинами.
2.Указатель азимута по п. 1, о т л и ч а ю щ и и с я тем, что, с целью компенсации моментов трения, на оси наружного кольца установлены принудительно вращаемые вокруг своих осей щссть роликов, по три у каждого конца вертикальной оси, расположенных одии по отпошеникт к другому под углом 120° и прижатых к цилиндрическим полуосям наружного кольца.
,3. Указатель по пп. 1 и 2, о т л и ч а ю и; и и с я тем, что, с целью предотвращения образования на цилиндрической оси лунок, платформы, на которых укреплены ролики, снабжены приводом для принудительного вращения вокруг цилиндрических осей.
4. Указатель по пп. 1-3, отл и ч а ю щ и и с я тем, что, с целью создания одинаковых моментов вокруг полуосей нарулсной рамки от силы трения роликов, один верхний и один нижний ролики прижаты к полуосям регулируемыми пружинами.
о. Указатель по пп. 1-4, отличающийся тем, что, с цель:о снижения трения роликов, оси роликов наклонены к образующей циомтеТкнГп ° ° результирующей скоро сти роликов, относительно цилиндра, совпадал с его образующей
де „иг„гкГ.„;го p-oi-j;: ,«сле/„ ;г„„вГг
-Г.Т raS Z ViVя Г;VoLrr - °- ° - № 146968
| название | год | авторы | номер документа |
|---|---|---|---|
| Гироскопический указатель крена железнодорожных или иных вагонов | 1947 |
|
SU71757A1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| ГИРОТАХОМЕТР | 2008 |
|
RU2367962C1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОПТИЧЕСКОЙ ОСИ В ПРОСТРАНСТВЕ | 1986 |
|
SU1841049A1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| ЦЕНТРИФУГА | 1993 |
|
RU2065779C1 |
О
