Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для построения системы управления приводами трехколечными шарикоподшипниками в гироскопических приборах.
Известен гирополукомпас – гироагрегат ГА-6, входящей в состав курсовой системы ГМК-1, с системой вращающихся подшипников (Акиндеев Ю.А., Воробьев В.Г., Карчевский А.А., Магнусов В.С., Селезнев Б.В., Шихер И.С. Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. М.: Машиностроение, 1989, стр. 344). ГА-6 содержит астатический трехстепенной гироскоп с вертикальной осью наружной рамы, систему горизонтальной коррекции, состоящую из последовательно соединенных жидкостного маятникового чувствительного (закреплен на гироузле), выключателя коррекции и коррекционного двигателя, ротор которого закреплен на оси наружной рамы. Азимутальная коррекция моментная, состоит из широтного потенциометра, расположенного в пульте управления и подключенного к коррекционному мотору, ротор которого закреплен на оси подвеса гироузла, а статор – на наружной раме. Для уменьшения трения в оси подвеса гироузла применены трехколечные шарикоподшипники, у которых средние кольца приводятся во вращение в разные стороны двумя двигателями с редукторами с заданной частотой вращения. Изменение направления вращения двигателей осуществляется узлом реверса электромеханического или электронного типа.
Недостатком гирополукомпаса ГА-6 с системой вращающихся шарикоподшипников является с одной стороны громоздкость конструкции блока реверса, с другой стороны – отсутствие устройства, которое позволяет изменять периоды реверса индивидуально для каждого двигателя при настройке при изготовлении и в процессе эксплуатации при регламентных работах.
Известен гирополукомпас с аналитической азимутальной коррекцией взятый за прототип (Патент № 2799738 Российская Федерация, МПК G01C 19/54 (2006.01), СПК G01C 19/54 (2023.05). Гирополукомпас с аналитической азимутальной коррекцией: №2023112849: заявл. 18.05.2023: опубл. 11.07.2023/ Кривошеев С. В., Стрелков А.Ю., Гилемханов Р.И., заявитель "Казанский национальный исследовательский технический университет им. А.Н. Туполева - КАИ", Бюл. №20) который содержит трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенному на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а также указатель ортодромического курса, микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса. В приборе влияние остаточного небаланса компенсируется аналитически, когда проводят регламентные работы.
Недостатком прототипа является пониженная точность из-за отсутствия системы осреднения моментов трения в опорах подвеса гироузла.
Техническим результатом изобретения является повышение точности формирования ортодромического курса, путем осреднения момента трения в опорах гироузла.
Технический результат достигается тем, что в гирополукомпасе, содержащем трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, указатель ортодромического курса и микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а первый выходной порт соединен с указателем ортодромического курса, который аналитически формируется в микроконтроллере, новым является то, что в пульт управления дополнительно введены первый и второй задатчики периода реверса, подключенные на пятый, шестой входные порты микроконтроллера, задатчики моментов трения первого и второго шарикоподшипников, подключенные на седьмой и восьмой входные порты микроконтроллера, второй и третий выходные порты которого подключены к первому и второму управляющим входам аналогового коммутатора, первый и второй сигнальные выходы которого соединены с входами первого и второго двигателей размещенных на наружной раме гирополукомпаса, которые кинематически с помощью первого и второго редукторов соединены со средними кольцами первого и второго трехколечных шарикоподшипников, которые являются опорами подвеса гироузла, при этом сигнальный вход аналогового коммутатор подключен к выходу блока питания.
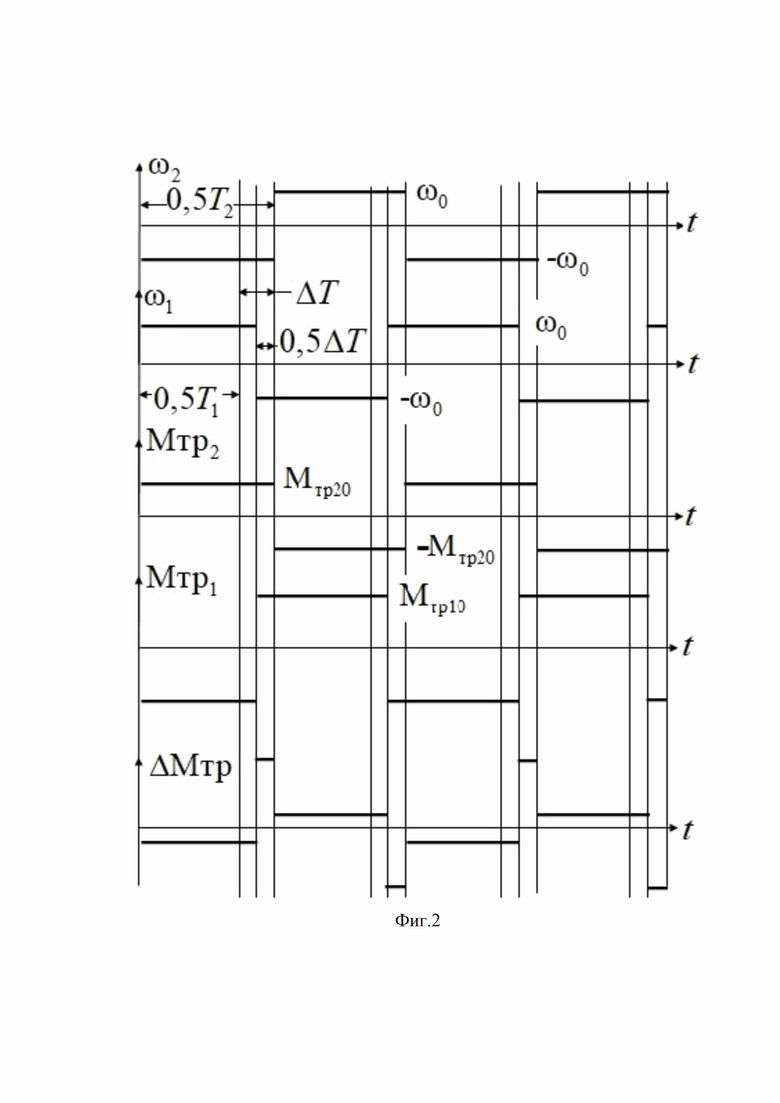
Построение гирополукомпаса поясняется структурно-кинематической схемой, приведенной на фиг. 1, и эпюрами вращения трехколечных шарикоподшипников, приведенной на фиг. 2, на которых приняты следующие обозначения:
1 – корпус;
2 – наружная рама;
3; 4 – полуоси подвеса наружной рамы;
5 – гироузел;
6; 7 – полуоси подвеса гироузла;
8 – маятниковый чувствительный элемент;
9 – выключатель коррекции;
10 – ротор коррекционного мотора горизонтальной коррекции;
11 – статор коррекционного мотора горизонтальной коррекции;
12 – ротор системного датчика угла;
13 – статор системного датчика угла;
14 – преобразователь аналог-код;
15 – микроконтроллер;
16 – пульт управления;
17 – задатчик широты;
18 – задатчик балансировочного сигнала;
19 –задатчик начального курса;
20 – указатель ортодромического курса;
21 – автопилот;
22 – первый задатчик периода реверса;
23 – второй задатчик периода реверса;
24 – блок питания;
25 – аналоговый коммутатор;
26 – первый двигатель;
27 –второй двигатель;
28 – первый трехколечный шарикоподшипник;
29 – второй трехколечный шарикоподшипник;
30 – первый редуктор;
31 – второй редуктор;
32 – задатчик момента трения первого шарикоподшипника;
33 – задатчик момента трения второго шарикоподшипника;
 вектор кинетического момента;
вектор кинетического момента;
 местная вертикаль;
местная вертикаль;
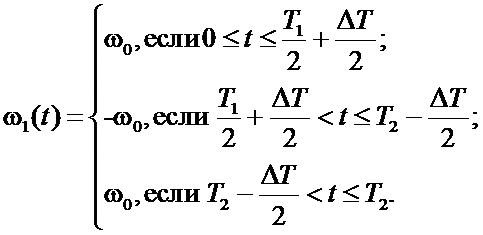
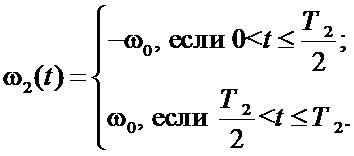
 угловые скорости вращения средних колец первого и второго трехколечных шарикоподшипников в функции времени;
угловые скорости вращения средних колец первого и второго трехколечных шарикоподшипников в функции времени;
 модуль угловой скорости вращения средних колец;
модуль угловой скорости вращения средних колец;
 время вращения среднего кольца первого шарикоподшипника в одну сторону;
время вращения среднего кольца первого шарикоподшипника в одну сторону;
 время вращения среднего кольца второго шарикоподшипника в одну сторону (соответствует полупериоду реверса);
время вращения среднего кольца второго шарикоподшипника в одну сторону (соответствует полупериоду реверса);
 разность времен вращения средних колец подшипников в одну сторону;
разность времен вращения средних колец подшипников в одну сторону;
 моменты трения в первом и втором трехколечных шарикоподшипниках в функции времени;
моменты трения в первом и втором трехколечных шарикоподшипниках в функции времени;
 модули моментов трения в первом и втором трехколечных шарикоподшипниках.
модули моментов трения в первом и втором трехколечных шарикоподшипниках.
В соответствии с фиг.1 гирополукомпас (ГПК) состоит из трехстепенного гироскопа с вертикальной осью наружной рамы, направленной по местной вертикали. Наружная рама 2 полуосями 3 и 4 кинематически установлена в опорах корпуса 1. Гироузел 5 с помощью полуосей 6 и 7 кинематически установлен в опорах наружной рамы 2, которые являются трехколечными шарикоподшипниками 28 и 29, средние кольца которых кинематически с помощью первого 30 и второго 31 редукторов соединены с осями первого 26 и второго 27 двигателей. Горизонтальная коррекция состоит из маятникового чувствительного элемента 8, который через размыкающий контакт выключателя коррекции 9 соединен со статором коррекционного мотора горизонтальной коррекции 11. Ротор коррекционного мотора горизонтальной коррекции 10 соединен с полуосью 4 подвеса наружной рамы 2. Системный датчик угла, например, синусно-косинусный трансформатор, является датчиком гироскопического курса и состоит из ротора 12, закрепленного на полуоси 3 наружной рамы 2, и статора 13, закрепленного на корпусе 1. Аналитическая азимутальная коррекция формируется программно в микроконтроллере 15 путем обработки сигналов статора системного датчика угла 13, прошедшего преобразование в двоичный код в преобразователе аналог-код 14, и задатчика широты 17, расположенного в пульте управления 16, которые соответственно подключены на первый и второй входные порты микроконтроллера 15. Установка начального ортодромического курса осуществляется задатчиком начального курса 19, подключенным на четвертый входной порт микроконтроллера 15. Компенсация постоянной составляющей небаланса осуществляется задатчиком балансировочного сигнала 18, подключенного на третий входной порт микроконтроллера 15. Указатель ортодромического курса 20 подключен к первому выходному порту микроконтроллера 15 (к этому выходному порту может быть подключен автопилот 21).
Управление первым 26 и вторым 27 двигателями осуществляется микроконтроллером 15, на пятый и шестой входные порты которого подключены первый 22 и второй 23 задатчики периода реверса, а на седьмой и восьмой входные порты соответственно подключены задатчики 32 и 33 моментов трения первого 28 и второго 29 шарикоподшипника. На второй и третий выходные порты микроконтроллера 15 поступают сигналы, управляющие аналоговым коммутатором 25, которые коммутируют управляющие напряжения первым 26 и вторым 27 двигателями с временными интервалами, сформированными задатчиками 22 и 23. Если двигатели 26 и 27 постоянного тока, то блок питания будет источником постоянного напряжения, если же двигатели 26 и 27 переменного тока, то блок питания будет двухфазным или трехфазным. В принципе для первого варианта можно использовать борт сеть постоянного тока, а для второго варианта – сеть трехфазного питания.
Точность определения ортодромического курса ГПК определяется угловой скоростью дрейфа наружной рамы 2 относительно своей оси подвеса, определяемой полуосями 3 и 4. Основными факторами, вызывающими дрейф, являются: момент небаланса и момент сил сухого трения в опорах подвеса гироузла 5, а также момент трения в токоподводах.
Для уменьшения трения в опорах подвеса применяют трехколечные шарикоподшипники 28 и 29 с управляемым по направлению моментом трения. Для этого средние кольца шарикоподшипников принудительно вращают в разные стороны с периодическим реверсированием направления вращения.
Управление двигателями 26 и 27 осуществляется микроконтроллером 15, при этом возможны два режима периодического вращения средних колец шарикоподшипников, которые связаны с соотношением моментов трения в каждом отдельно взятом шарикоподшипнике, которые являются паспортными данными, и перед сборкой прибора проверяются. Обычно подшипники подбираются парами по значениям моментов трения с определенным допуском (метод селективного подбора). При управлении двигателями важными параметрами являются угловые скорости вращения средних колец и период реверса. Обычно угловая скорость средних колец выбирается значительно больше максимальной угловой скорости вращения летательного аппарата в проекции на ось подвеса гироузла и составляет 1-2 оборота в секунду. Более важным параметром является период реверса изменения направления вращения средних колец шарикоподшипников. При этом в зависимости от соотношения моментов трения в шарикоподшипниках:

в микроконтроллере будет формироваться отдельная ветвь управления двигателями 26 и 27.
Симметричный режим вращения средних колец шарикоподшипников.
Реализуется, когда моменты трения пары шарикоподшипников практически одинаковы, т.е. и задаются они задатчиками 32 и 33. В этом режиме на первом 22 и втором 23 задатчиках периода реверса устанавливают одинаковые значения полупериодов
и задаются они задатчиками 32 и 33. В этом режиме на первом 22 и втором 23 задатчиках периода реверса устанавливают одинаковые значения полупериодов  Указанные значения поступают на пятый и шестой входные порты микроконтроллера 15 с встроенными преобразователями «аналог-код», одновременно начинается отсчет времени таймера, которое сравнивается с установленными значениями полупериодов. При достижении равенства
Указанные значения поступают на пятый и шестой входные порты микроконтроллера 15 с встроенными преобразователями «аналог-код», одновременно начинается отсчет времени таймера, которое сравнивается с установленными значениями полупериодов. При достижении равенства  где t-текущее время таймера, на втором и третьем выходных портах формируются, например, логические единицы, которые проступают на первый и второй управляющие входы аналогового коммутатора 25, и одновременно происходит программный сброс таймера в ноль и начинается новый отсчет времени. Эти сигналы производят такие переключения в аналоговом коммутаторе 25, чтобы на первый и второй сигнальные выходы подавались напряжения с блока питания 24 такого знака или фазы, чтобы двигатели 26 и 27 вращали средние кольца в разные стороны, например, у подшипника 28 влево, а у подшипника 29 вправо. При повторном выполнении условия на втором и третьем выходных портах формируются логические нули, которые проступают на первый и второй управляющие входы аналогового коммутатора 25, и одновременно происходит программный сброс таймера в ноль и начинается новый отсчет времени. Эти сигналы производят такие переключения в аналоговом коммутаторе 25, чтобы на первый и второй сигнальные выходы подавались напряжения с блока питания 24 такого знака или фазы, чтобы двигатели 26 и 27 вращали средние кольца в разные стороны, но теперь направление вращения у средних колец подшипников сменится на противоположное: у подшипника 28 вправо, а у подшипника 29 влево. И далее смена направлений вращения будет периодически повторяться в течение всего времени работы ГПК.
где t-текущее время таймера, на втором и третьем выходных портах формируются, например, логические единицы, которые проступают на первый и второй управляющие входы аналогового коммутатора 25, и одновременно происходит программный сброс таймера в ноль и начинается новый отсчет времени. Эти сигналы производят такие переключения в аналоговом коммутаторе 25, чтобы на первый и второй сигнальные выходы подавались напряжения с блока питания 24 такого знака или фазы, чтобы двигатели 26 и 27 вращали средние кольца в разные стороны, например, у подшипника 28 влево, а у подшипника 29 вправо. При повторном выполнении условия на втором и третьем выходных портах формируются логические нули, которые проступают на первый и второй управляющие входы аналогового коммутатора 25, и одновременно происходит программный сброс таймера в ноль и начинается новый отсчет времени. Эти сигналы производят такие переключения в аналоговом коммутаторе 25, чтобы на первый и второй сигнальные выходы подавались напряжения с блока питания 24 такого знака или фазы, чтобы двигатели 26 и 27 вращали средние кольца в разные стороны, но теперь направление вращения у средних колец подшипников сменится на противоположное: у подшипника 28 вправо, а у подшипника 29 влево. И далее смена направлений вращения будет периодически повторяться в течение всего времени работы ГПК.
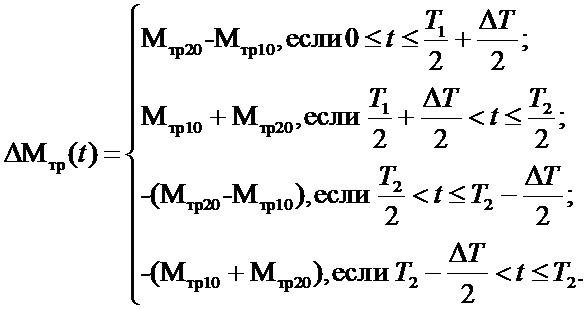
Математически изменение угловых скоростей средних колец подшипников  и создаваемых ими моментов трения
и создаваемых ими моментов трения  можно представить следующими выражениями
можно представить следующими выражениями
 ;
;  .
.
 ;
;  .
.
Суммарный момент трения в оси подвеса гироузла равен

и в идеальном варианте должен быть близок к нулю. В действительности моменты трения в первом и втором шарикоподшипниках не равны и картина осреднения моментов трения выглядит иначе.
Асимметричный режим вращения средних колец шарикоподшипников.
Реализуется, когда моменты трения пары шарикоподшипников отличаются. В этом режиме моменты трения  также задаются задатчиками 32 и 33. Рассмотрим вариант, когда
также задаются задатчиками 32 и 33. Рассмотрим вариант, когда  При этом на втором задатчике периода реверса 23 устанавливают значение период реверса
При этом на втором задатчике периода реверса 23 устанавливают значение период реверса  , а первый задатчик периода реверса 22 отключают, а его значение
, а первый задатчик периода реверса 22 отключают, а его значение  будет формироваться программно из условия равенства нулю дрейфа ГПК за полпериода, т.е. чтобы у ГПК дрейф за полупериод, обусловленный подшипником с меньшим моментом трения, полностью компенсировался дрейфом, который создается подшипником с большим моментом трения.
будет формироваться программно из условия равенства нулю дрейфа ГПК за полпериода, т.е. чтобы у ГПК дрейф за полупериод, обусловленный подшипником с меньшим моментом трения, полностью компенсировался дрейфом, который создается подшипником с большим моментом трения.
В соответствии с фиг.2, и правилом прецессии гироскопа суммарный дрейф за полупериод подшипника с меньшим моментом трения будет определяться формулой

Накладывая на величину дрейфа условие  получим выражение для определения
получим выражение для определения  и
и  в виде
в виде
 (1)
(1)
из которого следует, что если  то
то  а если
а если  то
то 
Пример.

 Таким образом
Таким образом 
В этом случае программно организуется таймер для большего периода реверса  .
.
Последовательность работы программы микроконтроллера будет следующей (рассмотрим для варианта  ):
):
1). Программа, анализируя соотношение между моментами трения и учитывая, что задан , переходит на вторую ветвь управления двигателями 27 и 28.
2). В соответствии с (1) формируются  и
и  и записываются в оперативную память.
и записываются в оперативную память.
3). Запускается системный таймер.
4). Одновременно на выходных портах два и три формируются, например, соответственно логическая единица и логический ноль, которые проступают на первый и второй управляющие входы аналогового коммутатора 25. Эти сигналы производят такие переключения в аналоговом коммутаторе 25, чтобы на первый и второй сигнальные выходы подавались напряжения с блока питания 24 такого знака или фазы, чтобы двигатели 26 м 27 вращали средние кольца в разные стороны, например, у подшипника 28 влево  , а у подшипника 29 вправо
, а у подшипника 29 вправо  .
.
5). При выполнении условия  на втором выходном порту формируется сигнал логического нуля, и аналоговый коммутатор изменяет направления вращения двигателя 26, а двигатель 27 продолжает вращаться в прежнем направлении. Вращение средних колец будет следующим: у подшипника 28 вправо
на втором выходном порту формируется сигнал логического нуля, и аналоговый коммутатор изменяет направления вращения двигателя 26, а двигатель 27 продолжает вращаться в прежнем направлении. Вращение средних колец будет следующим: у подшипника 28 вправо  , а у подшипника 29 остается прежним, т.е. вправо .
, а у подшипника 29 остается прежним, т.е. вправо .
6). При выполнении условия  системный таймер обнуляется и начинается новый отсчет времени. При этом на втором выходном порту остается сигнал логического нуля, а на третьем выходном порту формируется сигнал логической единицы. Аналоговый коммутатор изменяет направления двигателя 27, а двигатель 26 продолжает вращаться в прежнем направлении. Вращение средних колец будет следующим: у подшипника 28 останется вправо , а у подшипника 29 изменяется направление вращения, т.е. вправо
системный таймер обнуляется и начинается новый отсчет времени. При этом на втором выходном порту остается сигнал логического нуля, а на третьем выходном порту формируется сигнал логической единицы. Аналоговый коммутатор изменяет направления двигателя 27, а двигатель 26 продолжает вращаться в прежнем направлении. Вращение средних колец будет следующим: у подшипника 28 останется вправо , а у подшипника 29 изменяется направление вращения, т.е. вправо .
.
7). В следующий полупериод  управление двигателями будет осуществляться в подобной последовательности.
управление двигателями будет осуществляться в подобной последовательности.
Алгоритм управления средними кольцами шарикоподшипников.
В этом случае основная особенность будет состоять в построении алгоритма управления средним кольцом шарикоподшипника с большим моментом трения. При предположении, что  таким шарикоподшипником будет первый шарикоподшипник 28.
таким шарикоподшипником будет первый шарикоподшипник 28.
Математически изменение угловых скоростей средних колец подшипников и создаваемых ими моментов трения  за период реверса
за период реверса  можно представить следующими выражениями, которые графически представлены на фиг.2
можно представить следующими выражениями, которые графически представлены на фиг.2
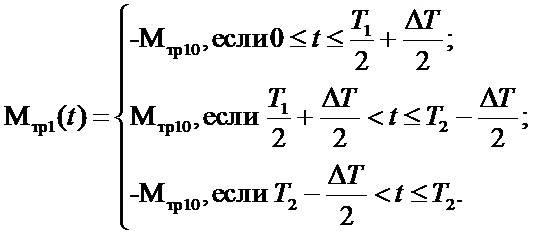
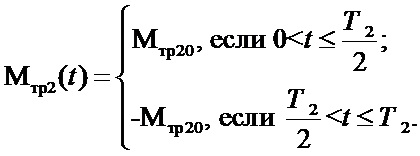
Суммарный момент трения в двух шарикоподшипниках
Оценим дрейф ГПК за период реверса  .
.
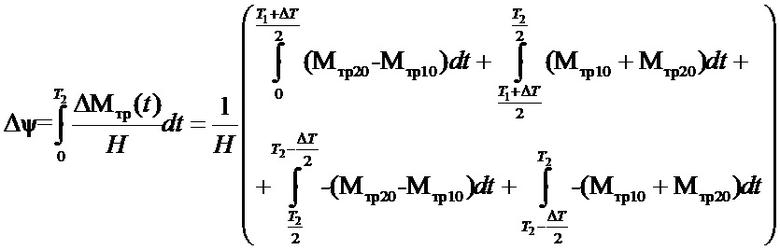

Таким образом, осредненный дрейф как за полупериод  так и период
так и период  равняется нулю.
равняется нулю.
Выводы.
1. Система управления трехколечными шарикоподшипниками на базе микроконтроллера позволяет реализовывать различные и более гибкие режимы осреднения моментов трения в осях подвеса гироскопических приборов, что способствует повышению точности.
2. Когда моменты трения в трехколечных шарикоподшипниках отличаются, то рационально управлять ими по схеме: шарикоподшипник с меньшим моментом трения имеет больший период реверса, чем шарикоподшипник с большим моментом трения; время, соответствующее разности между полупериодами реверса заполняется для шарикоподшипника с большим моментом трения индивидуальным реверсом, например, с полупериодом равным  , как это показано на фиг. 2.
, как это показано на фиг. 2.
3. Предложенную в гирополукомпасе схему реверс можно использовать и в других гироскопических приборах, например, в гировертикалях. Кроме того, предложенная схема позволяет исследовать влияние на дрейф различных периодов реверса с возможностью управлять дрейфом в режиме самонастройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Устройство для настройки выключателя коррекции, построенного на базе двух гироскопических датчиков угловых скоростей | 2024 |
|
RU2839681C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |

Изобретение относится к точному приборостроению, а именно к гироскопической технике. Гирополукомпас содержит трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, первый и второй задатчики периода реверса, задатчики моментов трения первого и второго шарикоподшипников, подключенные соответственно на второй–восьмой входные порты микроконтроллера, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла. Первый выходной порт микроконтроллера соединен с указателем ортодромического курса, который аналитически формируется в микроконтроллере, второй и третий выходные порты которого подключены к первому и второму управляющим входам аналогового коммутатора, первый и второй сигнальные выходы которого соединены с входами первого и второго двигателей, размещенных на наружной раме гирополукомпаса, которые кинематически с помощью первого и второго редукторов соединены со средними кольцами первого и второго трехколечных шарикоподшипников, которые являются опорами подвеса гироузла, при этом сигнальный вход аналогового коммутатора подключен к выходу блока питания. Технический результат - повышение точности формирования ортодромического курса, путем осреднения момента трения в опорах гироузла. 2 ил.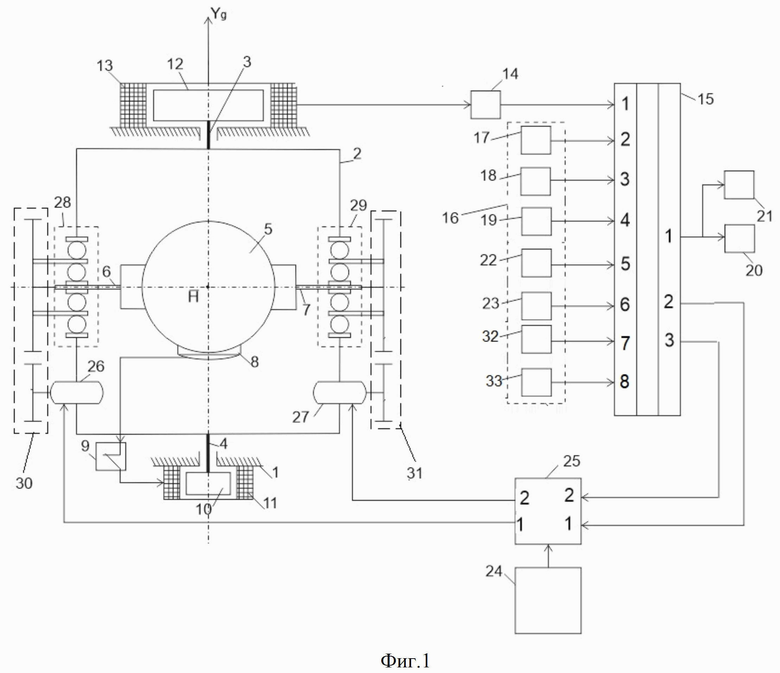
Гирополукомпас, содержащий трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, указатель ортодромического курса и микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а первый выходной порт соединен с указателем ортодромического курса, который аналитически формируется в микроконтроллере, отличающийся тем, что в пульт управления дополнительно введены первый и второй задатчики периода реверса, подключенные на пятый, шестой входные порты микроконтроллера, задатчики моментов трения первого и второго шарикоподшипников, подключенные на седьмой и восьмой входные порты микроконтроллера, второй и третий выходные порты которого подключены к первому и второму управляющим входам аналогового коммутатора, первый и второй сигнальные выходы которого соединены с входами первого и второго двигателей, размещенных на наружной раме гирополукомпаса, которые кинематически с помощью первого и второго редукторов соединены со средними кольцами первого и второго трехколечных шарикоподшипников, которые являются опорами подвеса гироузла, при этом сигнальный вход аналогового коммутатора подключен к выходу блока питания.
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Приспособление для предохранения от посадки судна на мель | 1926 |
|
SU5467A1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Демонстрационный гироприбор | 1983 |
|
SU1080191A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| US 4109391 A, 29.08.1978. | |||

