25
пассик 18. Выход предусилителя 9 сое- 20 чатой рейки 28, устанавливают торцо- динен через форм, эующее устройство
10с сигнальным входом измерителя 5 разности фаз. Указатель 7 направления тока состоит из поворотного корпуса 19, установленного в основном корпусе 20, индекса 21, жестко соединенного с поворотным корпусом 19, двигателя 22, с помощью которого через пассик 23 производят поворот корпуса 19 и индекса 21. Датчик 11 опор- 30 ного сигнала состоит из обтюратора, заслонка 24 которого жестко соединена с корпусой, фотоприемника 25 и источника 26 света, установленных на поворотном корпусе 19 указателя 7 направления тока и вращающихся совместно с корпусом 19. Выход датчика
11опорного сигнала через формирзпо- щее .устройство 12 соединен с входом измерителя 5 разности фаз, выход которого через схему 6 управления соединен с двигателем 22 указателя 7 направления тока. Основной корпус
20 и двигатели 17 и 22 жестко закреплены на кронштейне 27, который через ., зубчатую рейку 28 соединен со стойкой 29, укрепленной на основании 30, на котором установлен также двухкоординатный стол 31 с исследуемым объектом 2,
35
40
50
вую поверхность постоянного магнита 13 над проводящей поверхностью иссле дуемого объекта 2 на расстоянии до 1 мм. При взаимодействии проводника с током с полем постоянного магнита 13 в последнем возникают механические колебания с частотой возбуждают.. го тока. Эти колебания преобразуютс.я в электрический сигнал с помощью пьезоэлемента 15;, усиливаются пред- усилителем 9 и через формирующее уст ройство -10 поступают на вход измерителя 5 разности фаз. Постоянный магнит 13, пьезоэлемент 15 и пред- усилит.ель 9 вращаются с определенной частотой с .помощью двигателя 17j при этом вследствие неравномерной чувствительности датчика 8 магнитного пс- ля по углу поворота (см. дизграмг.у направленности фиг. 3, 4) на выходе предусилителя 9 формируется ампли- тудно-модулированный сигнал с несущей частотой, равной частоте протекающего через поверхность объекта 2 возбуждающего тока и частотой модуляции, равной удвоенной частоте вращения постоянного магнита 13 и пьезоэлемента 15. Сигнал с выхода : предусилителя 9 поступает в формиру- ющее устройство 10, где дополнительно усиливается, детектируется к огра ничивается, в результате на сигнальный вход измерителя 5 разности фаз действуют нормированные по амплитуде прямоугольные импульсы, длительность и частота следования которых определяется диаграммой направленности и частотой вращения датчика В магнитного поля.
Схема 6 управления предназначена для управления работой указателя 7 направления тока, а именно скоростью и направлением вращения шагового двигателя 22. Блок состоит из задающего генератора, коммутатора, преобразу- няцего унитарный -код в 4-фазную систему напряжения, -и усилителя мощнос25
20 чатой рейки 28, устанавливают торцо-
30
.,
35
0
0
5
вую поверхность постоянного магнита 13 над проводящей поверхностью исследуемого объекта 2 на расстоянии до 1 мм. При взаимодействии проводника с током с полем постоянного магнита 13 в последнем возникают механические колебания с частотой возбуждают..;- го тока. Эти колебания преобразуютс.я в электрический сигнал с помощью пьезоэлемента 15;, усиливаются пред- усилителем 9 и через формирующее устройство -10 поступают на вход измерителя 5 разности фаз. Постоянный магнит 13, пьезоэлемент 15 и пред- усилит.ель 9 вращаются с определенной частотой с .помощью двигателя 17j при этом вследствие неравномерной чувствительности датчика 8 магнитного пс- ля по углу поворота (см. дизграмг.у направленности фиг. 3, 4) на выходе предусилителя 9 формируется ампли- тудно-модулированный сигнал с несущей частотой, равной частоте протекающего через поверхность объекта 2 возбуждающего тока и частотой модуляции, равной удвоенной частоте вращения постоянного магнита 13 и пьезоэлемента 15. Сигнал с выхода : предусилителя 9 поступает в формиру- ющее устройство 10, где дополнительно усиливается, детектируется к огра ничивается, в результате на сигнальный вход измерителя 5 разности фаз действуют нормированные по амплитуде прямоугольные импульсы, длительность и частота следования которых определяется диаграммой направленности и частотой вращения датчика В магнитного поля.
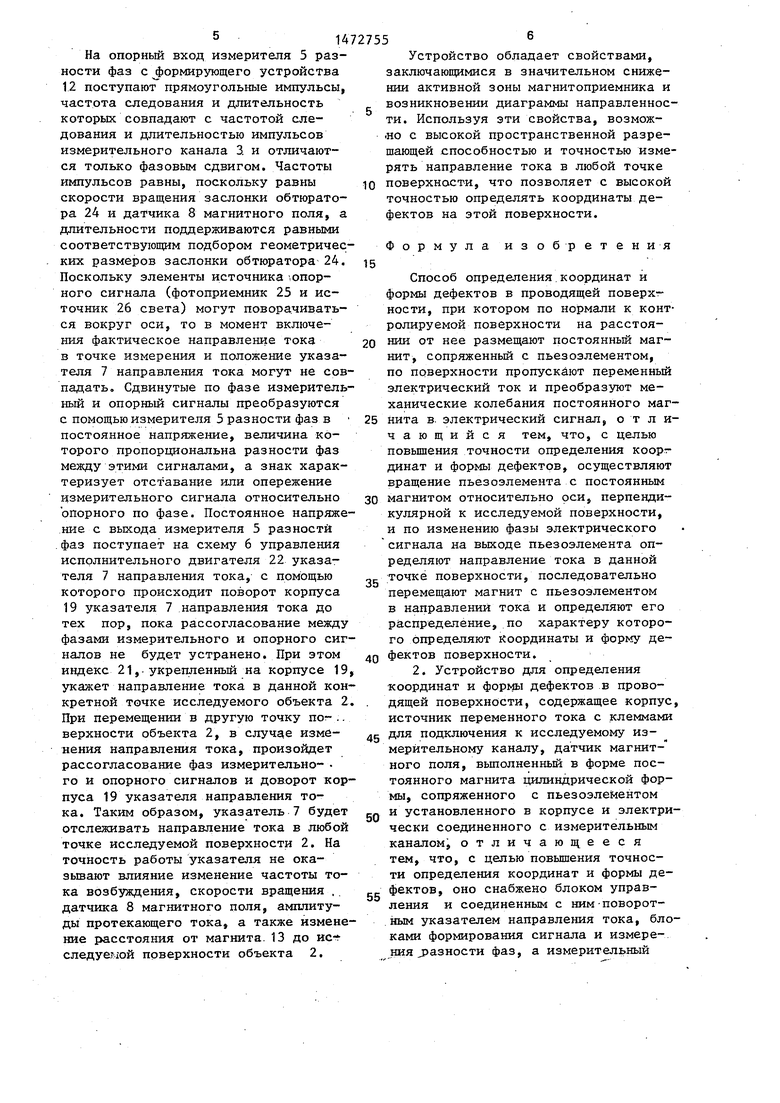
На опорный вход измерителя 5 нести фаз с ормирующего устройства 12 поступают прямоугольные импульсы, частота следования и длительность которых совпадают с частотой следования и длительностью импульсов измерительного канала 3. и отличаются только фазовым сдвигом. Частоты импульсов равны, поскольку равны скорости вращения заслонки обтюратора 24 и датчика 8 магнитного поля, а длительности поддерживаются равными соответствующим подбором геометрических размеров заслонки обтюратора 24. Поскольку элементы источника юпор- ного сигнала (фотоприемник 25 и источник 26 света) могут поворачиваться вокруг оси, то в момент включения фактическое направление тока в точке измерения и положение указателя 7 направления тока могут не совпадать. Сдвинутые по фазе измерительный и опорный сигналы преобразуются с помощью измерителя 5 разности фаз в постоянное напряжение, величина которого пропорциональна разности фаз между этими сигналами, а знак характеризует отставание или опережение измерительного сигнала относительно опорного по фазе. Постоянное напряжение с выхода измерителя 5 разности .фаз поступает на схему 6 управления исполнительного двигателя 22 указателя 7 направления тока, с помощью которого происходит поворот корпуса 19 указателя 7 направления тока до тех пор, пока рассогласование между фазами измерительного и опорного сигналов не будет устранено. При этом индекс 21,. укрепленный на корпусе 19, укажет направление тока в данной конкретной точке исследуемого объекта 2, При перемещении в другую точку по- .. верхности объекта 2, в случае изменения направления тока, произойдет рассогласование фаз измерительно- го и опорного сигналов и доворот корпуса 19 указателя направления тока. Таким образом, указатель 7 будет отслеживать направление тока в любой точке исследуемой поверхности 2. На точность работы указателя не ока- зьшают влияние изменение частоты тока возбуждения, скорости вращения ,. датчика 8 магнитного поля, амплитуды протекающего тока, а также изменение расстояния от магнита. 13 до иc следуег-юй поверхности объекта 2.
1472755
раз- Устройство обладает свойствами,
заключающимися в значительном снижении активной зоны магнитоприемника и возникновении диаграммы направленности. Используя эти свойства, возмож- -но с высокой пространственной разрешающей способностью и точностью измерять направление тока в любой точке поверхности, что позволяет с высокой точностью определять координаты дефектов на этой поверхности.
10
Формула изобретения
15
20
25
30
35
Способ определения.координат и формы дефектов в проводящей поверхности, при котором по нормали к контролируемой поверхности на расстоянии от нее размещают постоянный магнит, сопряженный с пьезозлементом, по поверхности пропускают переменный электрический ток и преобразуют механические колебания постоянного магнита в. электрический сигнал, отличающийся тем, что, с целью повышения точности определения коорг- динат и формы дефектов, осуществляют вращение пьезоэлемента с постоянным магнитом относительно оси, перпендикулярной к исследуемой поверхности, и по изменению фазы электрического сигнала на выходе пьезоэлемента определяют направление тока в данной точке поверхности, последовательно перемещают магнит с пьезоэлементом в направлений тока и определяют его распределение, по характеру которого определяют координаты и форму де40 фектов поверхности.
2. Устройство для определения координат и формы дефектов в прово. дящей поверхнйсти, содержащее корпус, источник переменного тока с клеммами для подключения к исследуемому измерительному каналу, датчик магнит- ного поля, выполненный в форме постоянного магнита цилиндрической формы, сопряженного с пьезоэлементом и установленного в корпусе и электрически соединенного с измерительным каналом, отличающ ееся тем, что, с целью повышения точности определения координат и формы дефектов, оно снабжено блоком управления и соединенным с ним-поворотным указателем направления тока, блоками формирования сигнала и измерения JP аз нос ти фаз, а измерительный
45
50
55
Формула изобретения
0
5
0
5
Способ определения.координат и формы дефектов в проводящей поверхности, при котором по нормали к контролируемой поверхности на расстоянии от нее размещают постоянный магнит, сопряженный с пьезозлементом, по поверхности пропускают переменный электрический ток и преобразуют механические колебания постоянного магнита в. электрический сигнал, отличающийся тем, что, с целью повышения точности определения коорг- динат и формы дефектов, осуществляют вращение пьезоэлемента с постоянным магнитом относительно оси, перпендикулярной к исследуемой поверхности, и по изменению фазы электрического сигнала на выходе пьезоэлемента определяют направление тока в данной точке поверхности, последовательно перемещают магнит с пьезоэлементом в направлений тока и определяют его распределение, по характеру которого определяют координаты и форму де0 фектов поверхности.
2. Устройство для определения координат и формы дефектов в проводящей поверхнйсти, содержащее корпус, источник переменного тока с клеммами для подключения к исследуемому измерительному каналу, датчик магнит- ного поля, выполненный в форме постоянного магнита цилиндрической формы, сопряженного с пьезоэлементом и установленного в корпусе и электрически соединенного с измерительным каналом, отличающ ееся тем, что, с целью повышения точности определения координат и формы дефектов, оно снабжено блоком управления и соединенным с ним-поворотным указателем направления тока, блоками формирования сигнала и измерения JP аз нос ти фаз, а измерительный
5
0
5
блок снабжен датчиком опорного сигнала в виде обтюратора, заслонка которого закреплена на корпусе датчика магнитного поля, который установлен с возможностью вращения относитель2755
8
но продольной геометрической оси стержня постоянного магнита, причем датчик опорного сигнала соединен через блок формирования сигнала с входом блока измерения разности фаз.

| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК МАССОВОГО РАСХОДА НА ОСНОВЕ ЭФФЕКТА КОРИОЛИСА | 2000 |
|
RU2272257C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК, СИСТЕМА КОНТРОЛЯ И СПОСОБ ВЫЯВЛЕНИЯ ОТКЛОНЕНИЙ ОТ НОРМЫ В ЭЛЕКТРОПРОВОДНЫХ МАТЕРИАЛАХ | 2013 |
|
RU2606695C2 |
| Первичный измерительный преобразователь вектора скорости течения | 1987 |
|
SU1812502A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОВОДИМОСТИ И ИМПЕДАНСА РАСТВОРОВ ЭЛЕКТРОЛИТОВ И БИОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 2021 |
|
RU2753465C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
| ДАТЧИК МАССОВОГО РАСХОДА НА ОСНОВЕ ЭФФЕКТА КОРИОЛИСА (ВАРИАНТЫ) | 2001 |
|
RU2277227C2 |
| УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МАССОВОГО РАСХОДА НА ОСНОВАНИИ ОБУСЛОВЛЕННОГО СИЛОЙ КОРИОЛИСА СДВИГА ФАЗ | 1999 |
|
RU2263284C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610931C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕТОДОМ МАГНИТНОЙ ИНДУКЦИОННОЙ ТОМОГРАФИИ | 1996 |
|
RU2129406C1 |

Изобретение может быть использовано для определения мест коротких замыканий в печатных платах. Способ определения координат и формы дефектов (Д) в проводящей поверхности реализован в устройстве. Для повышения точности определения вращают пьезоэлемент 15 с постоянным магнитом (ПМ) 13 относительно оси, перпендикулярной к исследуемой поверхности объекта 2, которую возбуждают возбудителем 1 переменного тока. По изменению фазы электрического сигнала на измерителе 5 разности фаз определяют направление тока с помощью указателя направления тока в данной точке поверхности. Перемещают последовательно ПМ 13 в направлении тока и определяют его распределение, по характеру которого находят координаты и определяют форму Д. Изобретение повышает точность определения координат Д. 2 с.п. ф-лы, 5 ил.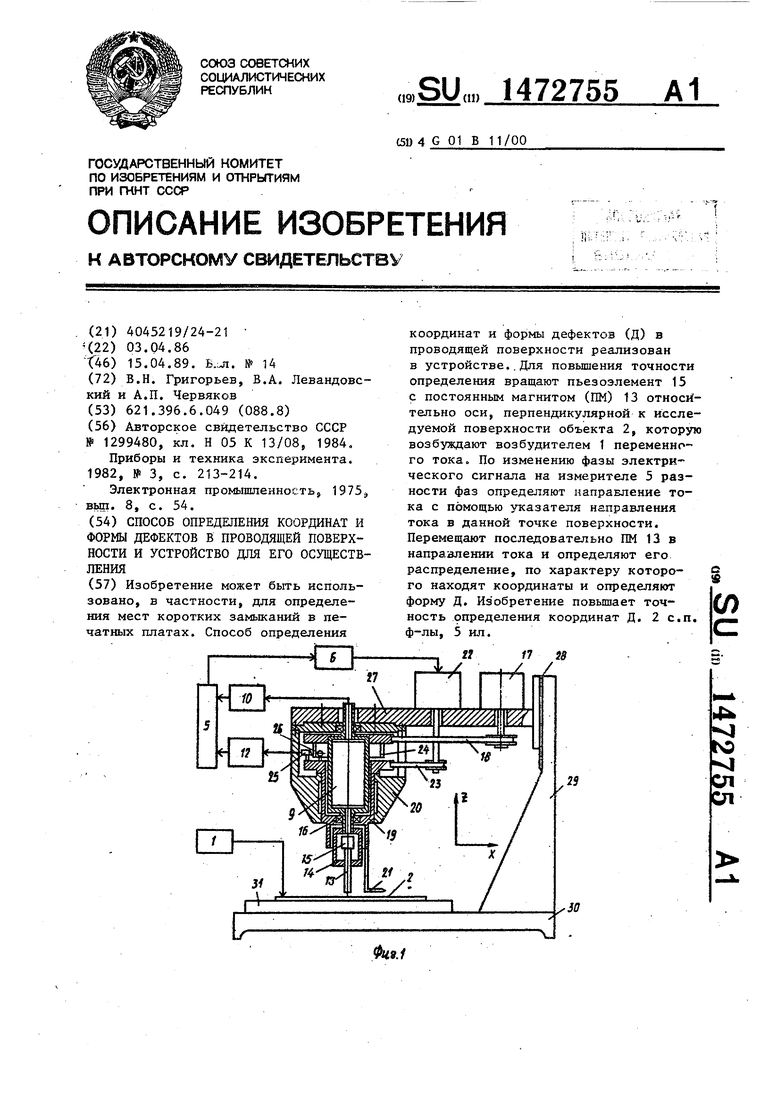
11
н
2000
Вь/х. МЗ
1000
72
П
сриг.2
ByJ
0,01 110
Фиг. 5
too 1Ш
(7л/)
мм
| Авторское свидетельство СССР № 1299480, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приборы и техника эксперимента | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Кулиса для фотографических трансформаторов и увеличительных аппаратов | 1921 |
|
SU213A1 |
| Электронная промышленность, 1975j вып | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
