у. (О а.еТ-ф аЛ-айМхШаШаЗ . «-.A. fUv+ nnOaa/xfiT. WT.
KCOS(GV- noc)(t -X/x(iT0)/T0),
(O
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамических процессов в системах автоматического управления | 1979 |
|
SU866566A1 |
| Система для моделирования динамических процессов в системах автоматического управления | 1985 |
|
SU1260980A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ | 1990 |
|
RU2031434C1 |
| Устройство для определения корреляционных характеристик случайного процесса | 1984 |
|
SU1164742A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| Управляемый фильтр | 1981 |
|
SU970644A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| Устройство для оценки отношения корреляционных моментов | 1984 |
|
SU1164741A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
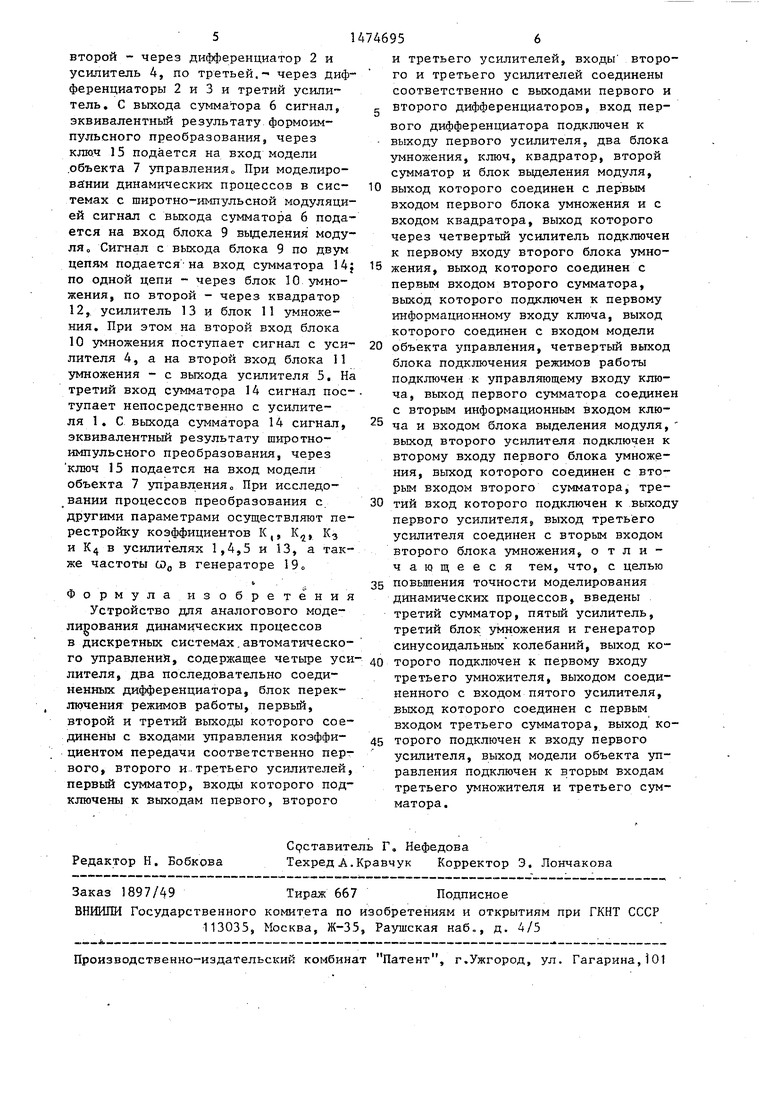
Изобретение относится к вычислительной аналоговой технике. Цель изобретения - повышение точности моделирования динамических процессов. Устройство содержит первый, второй, третий и четвертый усилители 1,4,5 и 13, первый и второй дифференциаторы 2 и 3, первый и второй сумматоры 6 и 14, первый и второй блоки умножения 10 и 11, блок 8 переключения режимов работы, модель объекта управления 7, блок 9 выделения модуля, квадратор 12 и ключ 15. Поставленная цель достигается тем, что в устройство введены пятый усилитель 17, третий блок 18 умножения и генератор 19 синусоидальных колебаний. 1 ил.
где C00 - 2/iT/T0 - частота квантования
по времени;
-- i
существенному искажению входного
сигнала.
Эе/х(1Т0)/Т0 - длительность импуль- Ряд в правой части выражения (1) са для 1-го периода, 4Q можно аппроксимировать его первым зависящая от ампли- членом (п 0) , а все остальные члены ряда считать помехой, вызванной квантованием сигнала по времени в широтно-импульсном модуляторе.
туды входного сигнала x(iT0); v Эе - коэффициент пропорт
циональности.
Из выражения (1) следует, что процесс квантования по времени и последующего формирования широтно- модулированных импульсов в дискретной системе управления приводит к
45,
При учете ллшь первого члена и осуществляется моделирование исследуемой системы по полезному сигналу.
Выражение сигнала помехи можно записать в виде:
чп
f; (t) - азе
К
nЈ0 L
+ 5isJi&± HW ollo /xiiTЈl( г.-i
0V nQ0)(iT)/cos ЦЫ,, ncyioj .
раскладывая тригонометрические функции, стоящие в числителях дробей выражения (2), в ряд Маклорена и ог
При учете ллшь первого члена и осуществляется моделирование исследуемой системы по полезному сигналу.
Выражение сигнала помехи можно записать в виде:
(2)
раничиваясь двумя членами ряда, получают выражение для помехи в следующем виде:
314746954
f. (t) cosU.t. cosn«0t |°-X /x(iT) 4-(cos CO x x
x costuo0t) + I|-9e%(iT0)/™(cos04f cosnQ0t) .
Поскольку это выражение для. сигнала помехи соответствует случаю, когда на вход импульсного элемента поступает гармонический сигнал ви- оо
да x(t) а cosw-xt, вольном входном сигн
10
записать
ГТг
f;(t) 29eX.U(t)cosnQ0t - Tr-9e/x(iT0)/-r-(x(t)cosnQ0t)
H 1UЈat
-%%(iTj/|-Ј X t)c08tlUet) .
Для того, чтобы получить выражение для сигнала помехи, справедливое для любого момента времени, в выражении (4) величину x(iT0), являющуюся выходным сигналом экстраполя- тора нулевого порядка, заменяют ее приближенным выражением вида
°° Гт
fT(t) (t)cosiuaet - f-as/xCt) - J-x(t)
n-
j i--, 2.
« 3- (t)cosnQatJ + i|-9ea/x(t) - |°-x(t) +
+ -|-x(t)/.
л
(t)cosnC00t|j .
В основу разработки структуры предлагаемого технического решения положено выражение (6)„ Его анализ показывает, что для моделирования сигнала помехи необходимо сформиро вать сигнал вида 2x(t) cos nW0t и подвергнуть его тому же преобразованию, что и полезный сигнал, причем, как показывают исследования, достаточно учитывать в сигнале помехи первую гармонику (п 1).
Устройство работает следующим образом.
С блока 8 переключения режимов работы в зависимости от моделирования процессов формоимпульсного или широтно-импульсного преобразования на вход ключа 15 подают сигнал, по Которому через ключ 15 пропускается сигнал или с выхода сумматора 6 (при моделировании процессов формоимпульсного преобразования), или с выхода сумматора 14 (при моделировании систем с ШИМ) и устанавливают значения коэффициентов К2, Кэ,
К 4 и К5 в усилителях 1,4,5,13
и 17.
При моделировании динамического процесса в САУ с ШИМ значения коэфда x(t) а cosw-xt, то при произвольном входном сигнале x(t) можно
10
записать
(4)
x(iT0)x(t) - -x(t) + -|-x(t). (5)
Окончательное выражение для сигнала помехи с учетом представления (5) имеет вид
t -x(t)/,
(6)
0
5
0
5
К Т0/2;
5
фициентов устанавливаются К( Х;
5 К4 эе и К5 2. При моделировании динамического процесса в САУ с формеимпульсным преобразованием устанавливают значения коэффициентов К,, К и К-, а значение коэффициента принимают , Значение коэффициента К . произвольно о
Устройство содержит генератор 19 синусоидальных колебаний с частотой С00 2fr/T0 и единичной амплитудой
При включении устройства сигнал с выхода модели объекта поступает на второй вход третьего блока 18 умножения и на второй вход третьего сумматора 16„ На первый вход третьего блока 18 умножения поступает сигнал cost00t с генератора 19 Сигнал с выхода блока 18 поступает на первый вход пятого усилителя 17, на выходе которого формируется сигнал помехи 2x(t)coscJ0t. Этот сигнал поступает на первый вход третьего сумматора 160 Сигнал с выхода сумматора 16 усиливается и по трем цепям подается на входы сумматора 6: по одной цепи - непосредственно, по
51
второй - через дифференциатор 2 и усилитель 4, по третьей,- через дифференциаторы 2 и 3 и третий усилитель. С выхода сумматора 6 сигнал, эквивалентный результату формоим- пульсного преобразования, через ключ 15 подается на вход модели объекта 7 управления0 При моделировании динамических процессов в системах с широтно-импульсной модуляцией сигнал с выхода сумматора 6 подается на вход блока 9 выделения модуля Сигнал с выхода блока 9 по двум цепям подается на вход сумматора 14$ по одной цепи - через блок 10 умножения, по второй - через квадратор 12, усилитель 13 и блок 11 умножения. При этом на второй вход блока 10 умножения поступает сигнал с усилителя 4, а на второй вход блока 11 умножения - с выхода усилителя 5. На третий вход сумматора 14 сигнал поступает непосредственно с усилителя 1 . С выхода сумматора 14 сигнал, эквивалентный результату широтно- импульсного преобразования, через ключ 15 подается на вход модели объекта 7 управления При исследовании процессов преобразования с другими параметрами осуществляют перестройку коэффициентов К,, К, К3 и К4 в усилителях 1,4,5 и 13, а также частоты ID0 в генераторе 19
о
Формула изобретения
Устройство для аналогового моделирования динамических процессов в дискретных системах автоматического управления, содержащее четыре усилителя, два последовательно соединенных дифференциатора, блок переключения режимов работы, первый, второй и третий выходы которого соединены с входами управления коэффициентом передачи соответственно первого, второго и третьего усилителей, первый сумматор, входы которого подключены к выходам первого, второго
746956
и третьего усилителей, входы второго и третьего усилителей соединены соответственно с выходами первого и с второго дифференциаторов, вход перО
вого дифференциатора подключен к выходу первого усилителя, два блока умножения, ключ, квадратор, второй сумматор и блок выделения модуля,
Ю выход которого соединен с дервым входом первого блока умножения и с входом квадратора, выход которого через четвертый усилитель подключен к первому входу второго блока умно15 жения, выход которого соединен с первым входом второго сумматора, выход которого подключен к первому информационному входу ключа, выход которого соединен с входом модели
20 объекта управления, четвертый выход блока подключения режимов работы подключен к управляющему входу ключа, выход первого сумматора соединен с вторым информационным входом клю25 ча и входом блока выделения модуля, выход второго усилителя подключен к второму входу первого блока умножения, выход которого соединен с вторым входом второго сумматора, тре30 тий вход которого подключен к выходу первого усилителя, выход третьего усилителя соединен с вторым входом второго блока умножения, отличающееся тем, что, с целью
35 повышения точности моделирования динамических процессов, введены третий сумматор, пятый усилитель, третий блок умножения и генератор синусоидальных колебаний, выход ко40 торого подключен к первому входу третьего умножителя, выходом соединенного с входом пятого усилителя, выход которого соединен с первым входом третьего сумматора, выход ко45 торого подключен к входу первого усилителя, выход модели объекта управления подключен к вторым входам третьего умножителя и третьего сумматора.
| Устройство для моделирования динамических процессов в системе автоматического регулирования пневмодвигателя | 1974 |
|
SU524196A1 |
