(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1
Изобретение относится к вычисли- тельной технике, а именно j аналоговым вычислительным устройств 1м, применяемым для моделирования дискретных систем, и может быть использовано при исследовании ди 1амических процессов в дискретных системах управления (ДСУ) с широтно-импульсной модуляцией и в системах с амплитудно-импульсной модуляцией, в которых осуществляется формоимпульсное преобразование.
Известно устройство для моделирования динамических процессов в системе автоматического регулирования пневмодвигателя, содержащее блок моделирования пневморегулятора,блок моделирования силового дроссельного клапана, блок моделирования пневмодвигателя и блок моделирования тахометра 1 .
Однако это устройство может быть использовано для моделирования лишь непрерывных систем управления.
Наиболее близким техническим ре- , шением к изобретению является система для моделирования динамических процессов в системах автоматического управления, содержащее усилители, .сумматор, последовательно соединенные
первый и второй дифференциаторы и блок переключения 2.
Недостаток известного устройства заключается в том, что область применения его ограничена возможностями моделирования ; инейных дискретных систем управления с амплитудно-импулБсной модуляцией при прямоугольной и многотактной формах импульсов.
10 Нсшичие в известном устройстве только линейных элементов принципиально исключает возможность его использования для юделирования процессов в системах с широтно-импульсной 1 эду15 ляцией, которые являются существенно нелинейными.
Цель изобретения - расширение области применения путем обеспечения возможности моделирования динамичес20ких процессов в ДСУ с широтно-импульсным преобразователем без перестройки структуры этого устройства.
. Указанная цель достигается тем, что в устройство для моделирования
25 динамических процессов в системах автоматического управления, содержащее три усилителя, два последовательно соединенных дифференциатора, блок переключения, соединенный с первыми
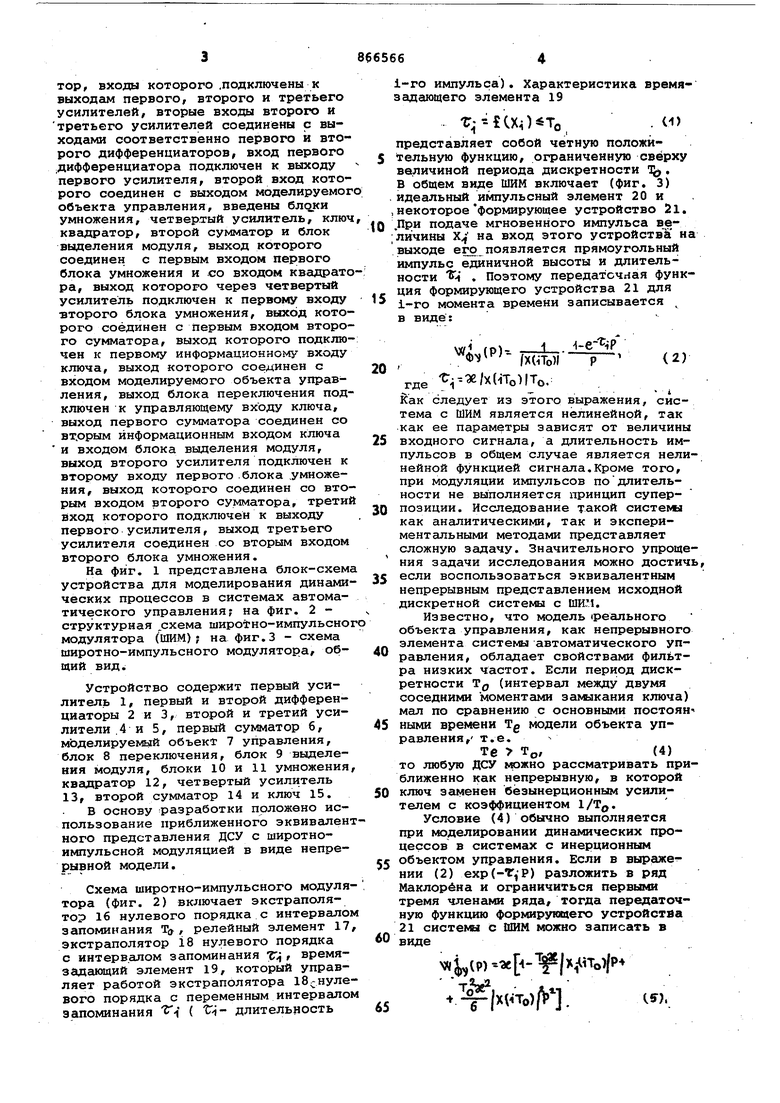
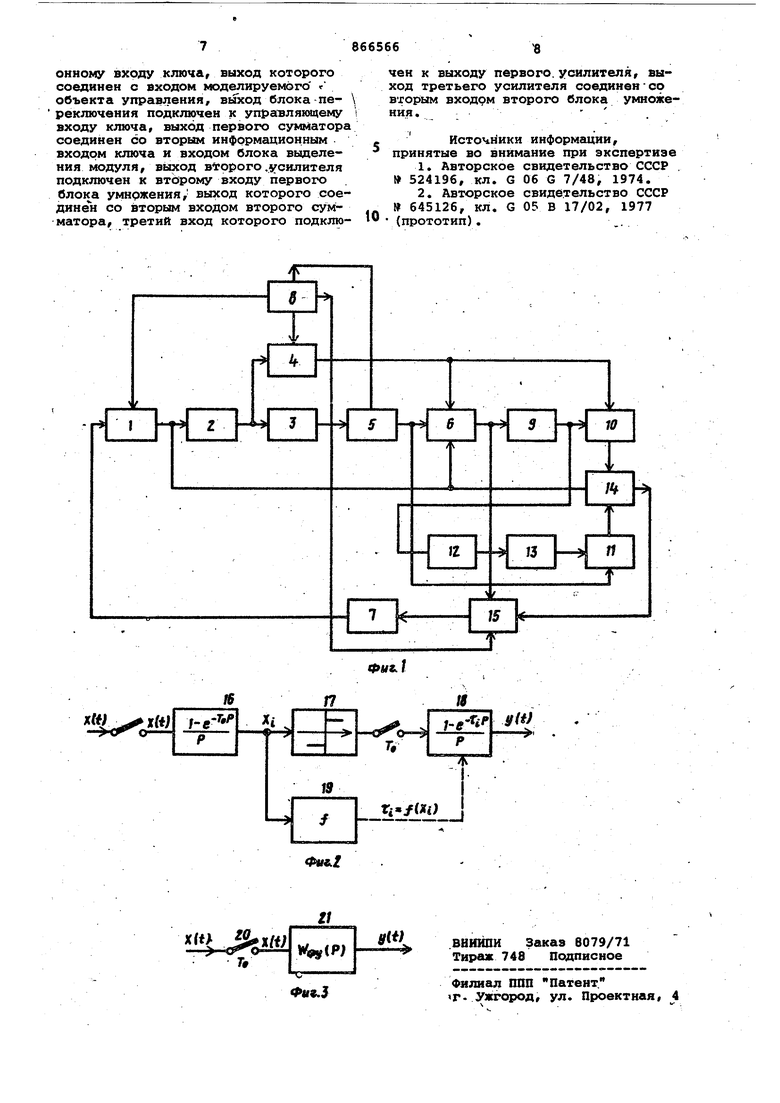
30 входами усилителей, и первый сумматор, входы которого .подключены к выходеи первого, второго и третьего усилителей, вторые входы второго и третьего усилителей соединены с выхода 4и соответственно первого и второго дифференциаторов, вход первого .дифференциатора подключен к выходу первого усилителя, второй вход которого соединен с выходом моделируемог объекта управления, введены умножения, четвертый усилитель, ключ квс1дратор, второй сумматор и блок выделения модуля, выход которого соединен с первым входом первого блока умножения и со входом квадрато ра, выход которого через четвертый усилитель подключен к первому входу второго блока умножения, ВЕ1Шбд которого соединен с первым входом второго сумматора, выход которого подклю чен к первому информационному входу ключа, выход которого соединен с входом моделируемого объекта управления, выход блока переключения подключен к управляющему входу ключа, выход первого сумматора соединен со вт,орым информационным входом ключа и входом блока выделения модуля, выход второго усилителя подключен к второму входу первого блока умножения, выход которого соединен со вторым входом второго сумматора, третий вход которого подключен к выходу первого усилителя, выход третьего усилителя соединен со вторым входом второго блока умножения. На фиг. 1 представлена блок-схем устройства для моделирования динами ческих процессов в системах автоматического управления; на фиг. 2 структурная схема широтсно-импульсно модулятора (ШИМ); на фиг.З - схема широтно-импульсного модулятора, общий вид. Устройство содержит первый усилитель 1, первый и второй дифференциаторы 2 и 3, второй и третий усилители .4 и 5, первый сумматор 6, мЬделируемый объект 7 управления, блок 8 переключения, блок 9 выделения модуля, блоки 10 и 11 умножения квадратор 12, четвертый усилитель 13, второй сумматор 14 и ключ 15. В основу разработки положено использование приближенного эквивалент ного представления ДСУ с широтноимпульсной модуляцией в виде непрерывной модели. Схема широтно-импульсного модулятора (фиг. 2) включает экстраполятор 16 нулевого порядка с интервалом запоминания Тд , релейный элемент 17 экстраполятор 18 нулевого порядка с интерв.алом запоминания T-j, времязадающий элемент 19, который управляет работой экстраполятора 18-нулевого порядка с переменным интервалом запоминания ( длительность i-го импульса). Характеристика времязадающего элемента 19 )To . (1) представляет собой четную положительную функцию, ограниченную сверху величиной периода дискретности 1. В общем виде ШИМ включает (фиг. 3) идеальный импульсный элемент 20 и некотороеформирующее устройство 21. .При подаче мгновенного импульса величины на вход этого устройств на выходе его появляется прямоугольный импульс единичной высоты и длительности Ki . Поэтому передаточная функция формирующего устройства 21 для 1-го момента времени записывается в виде: где TO. Как следует из этого выражения, система с ШИМ является нелинейной, так как ее параметры зависят от величины входного сигнала, а длительность импульсов в общем случае является нелинейной функцией сигнёша.Кроме того, при модуляции импульсов по длительности не выполняется принцип суперпозиции. Исследование такой системы как аналитическими, так и экспериментальными методами представляет сложную задачу. Значительного упрощения задачи исследования можно достичь, если воспользоваться эквивалентным непрерывным представлением исходной дискретной системы с ШИ-М. Известно, что модель феального объекта управления, как непрерывного элемента системы автоматического управления, обладает свойствами фильтра низких частот. Если период дискретности TQ (интервал между двумя соседними моментами замыкания ключа) мал по сравнению с основными постоян ными времюни Tg модели объекта управления,- т.е. Те TO,(4) то любую ДСУ кюжно рассматривать приближенно как непрерывную, в которой ключ Зс1менен безынерционным усилителем с коэффициентом l/T. Условие (4) обычно выполняется при моделировании динамических процессов в системах с инерционным объектом управления. Если в выраже НИИ (2) ехр(-Т,Р) разложить в ряд Маклорёна и ограничиться первыми тремя членами ряда/ тогда передаточную функцию формирующего устройства 21 систекы с ШИМ можно записать в виде ivtP))h ; |XTO/VT. 4ff), Коэффициенты этой передаточной функ ции остаются постоянными лишь в пределах одного периода дискретност Сигнал на выходе формирующего устройства 21 системы с ЩИМ в течение каждого периода дискретности будет определяться выражением )- Tr| io / |хито)(((п|То 1-1-я)То. б Для того, чтобы получить выражение для сигнала на выходе ШИМ, сира ведливое на всем участке времени, в выражении (6) величину X(iTe), явл ющуюся выходным сигналом экстраполя тора 16 нулевого порядка, заменим ее приближенным выражением: т -г X(iTo)-X (-t) f-Ш X сиОкончательно будем иметь (t)- x(t)- чи)хШ/хШ . )x(M-Tic-t)xa)). п Таким образом, сигнал на выходе широтно-импульсного модулятора может быть приближенно описан нелинейным дифференциальным уравнением 2-го порядка. Устройство работает следующим образом. С блока 8 переключения в зависимости от моделирования процессов фор моимпульсного или широтно-импульсного преобразования, во-первых, на вход ключа 15 подают сигнал, по которому через ключ 15 пропускается сигнал или с выхода сумматЪра 6. (пр моделировании процессов формоимпуль ного преобразования), или с выхода сумматора 14 (при моделировании сис тем с ШИМ), во-вторых, устанавливаю соответствующие значения коэффициен тон К,, К,, К, и К4 в усилителях 1, 4,. 5 и 13. при моделировании дин мического процесса в САУ с ШИМ значения коэффициентов устанавливаются равиыми:, .Л, , , Кд-.-эеД При включении систекш сигнал с выхо да моделируемого объекта. управления усиливается и по трем цепям подается на входы сумматора б: по одн цепи - непосредст.венно, по второй через дифференциатор 2 и усилитель 4, по-третьей - через дифференциато ры 2 , 3 И третий усилитель 5. С выхода сумматора 6 сигнал, эквивалентный результату формоимпульсного преобразования, через ключ 15 подается на вход моделируемого объекта 7 управления. При моделировании динамических процессоь в системах с ШИМ сигнал с выхода сумматора 6 подается на вход блока 9выделения модуля. Сигнгш с выхода блока 9 по двум цепям подается на вход сумматора 14: по одной цепи - через блок умножения 10, по второй - через квадратор 12, усилитель 13 и блок умножения 11. При этом на второй вход блока умножения Ю поступает сигнал с усилителя 4, а иа второй вход блока умножения 11 - с выхода усилителя 5. На. третий вход сумматора 14 сигнал поступает непосредственно с усилителя 1. С выхода сумматора 14 сигнал, эквивалентный результату широтноимпульсного преобразования, через ключ 15 подается на вход моделируемого объекта 7 управления. При исследовании процессов преобразования с другими параметрами осуществляют перестройку коэффициентов К,К2, К ,и JC 4 в усилителях 1, 4, 5 и 13. Поскольку устройство без каких-либо изменений структуры может быть использовано при моделировании как формо-импульсного, так и широтноимпульсного преобразования, то тем самым расширяе.т.ся область его применения. Формула изобретения Устройство для моделирования динамических процессов в системах автоматического управления, содержащее три усилителя, два последовательно,соединенных дифференциатора, блок переключения, соединенный с первыми входами усилителей и первый сумматор, входы которого подключены к выходам первого, второго и третьего усилителей, вторые входы второго и третьего усилителей соединены с выходами соответственно пераого и второго дифференциаторов, вход первого дифференциатора подключен к выходу первого усилителя, второй вход которого соединен с выходом моделируемого объекта управления, отличающееся тем, что, с целью расширения области применения устройства, оно содержит блоки умножения, четвертый усилитель, ключ, квадратор, второй сумматор и блок выделения модуля, выход «{оторого соединен с первым входом первого блока умножения и со входом квадратора, выход которого через четвертый усилитель под1спючен к первому входу второго блока умножения, выход которого соединен с первым входом второго сумматора, выхоД которого подключен к первому информационному входу ключа, выход которого соединен с входом моделируемого объекта управления, вкГход блока переключения подключен к упра вляющему входу ключа, выход первого сумматора соединен со вторым информационным входом ключа и входом блока выделения модуля, выход второго .усилителя подключен к втброму входу первого блока умнржения, выход которого соедине со вторым входом второго сумматора, третий вход которого подключен к выходу первого, усилителя, выход третьего усилителя соединенсо вторым входрм второго блока умножения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР . 524196, кл. G 06 G 7/48, 1974,
2.Авторское свидетельство СССР 645126, кл, G 05 В 17/02, 1977
(прототип),..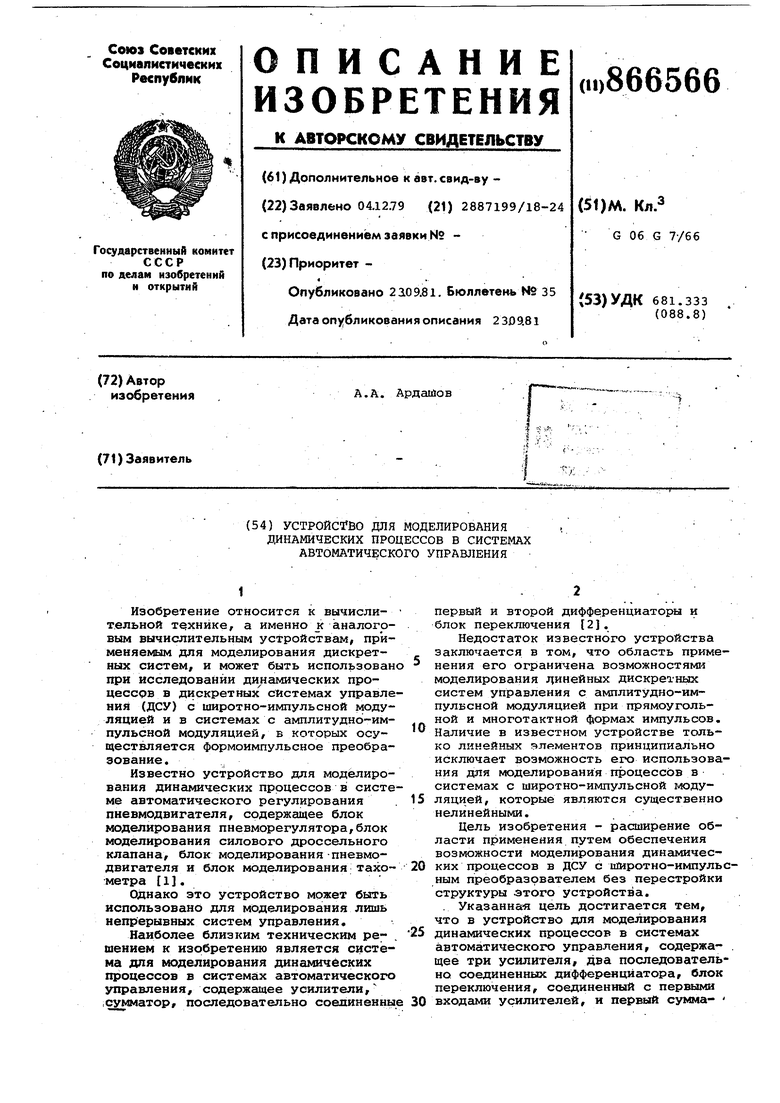

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для моделирования динамических процессов в системах автоматического управления | 1985 |
|
SU1260980A1 |
| Устройство для аналогового моделирования динамических процессов в дискретных системах автоматического управления | 1987 |
|
SU1474695A1 |
| Система для моделирования динамических процессов в системах автоматического управления | 1977 |
|
SU645126A1 |
| Аналого-цифровой Фурье-преобразователь | 1980 |
|
SU966886A1 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ СЛЕДЯЩЕГО ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ | 2003 |
|
RU2254663C2 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
П19
Фиг.1
)
