Изобретение относится к адаптивным системам управления нелинейным нестационарным объектом, синтезированным из условия обеспечения устойчивости на основе второго метода Ляпунова.
Целью изобретения является упрощение, повышение точности и расширение области применения системы управления нестационарными объектами.
В общем случае динамика движения объекта управления может быть представлена нелинейным дифференциальным уравнением
yi = Yi(y1, y2, y3,..., yn, t), (1) где уi - вещественные переменные, характеризующие состояние объекта управления; Yi - известные функции переменных уi и времени t , i = 1,2,... .
Определяют
xi(t)  yi(t) - y
yi(t) - y +
+  = Yi(y
= Yi(y
Если разложить в ряд Тейлора правые части дифференциального уравнения и вычесть из него дифференциальное уравнение невозмущенного движения = Yi(y
= Yi(y = ai1x1+ ai2x2+ ...+ ainxn+Ri(x1,x2, ..., xn),, (5) где Ri(x1, x2,... , xn) - совокупность членов, содержащих отклонения хi в степени выше первой.
= ai1x1+ ai2x2+ ...+ ainxn+Ri(x1,x2, ..., xn),, (5) где Ri(x1, x2,... , xn) - совокупность членов, содержащих отклонения хi в степени выше первой.
Если считать, что отклонения хi не малые величины, то член Ri(x1, x2,.. .,xn) в уравнении (5) отбросить нельзя. В этом случае можно записать эквивалентное уравнению (5) дифференциальное уравнение следующего вида: = [ai1+ Ri1(x1)]x1+ [ai2+ Ri2(x2)]x2+ ...+ [ain+ Rin(xn)]xn, (6) где Rij= aijxj; j =
= [ai1+ Ri1(x1)]x1+ [ai2+ Ri2(x2)]x2+ ...+ [ain+ Rin(xn)]xn, (6) где Rij= aijxj; j =  ; aij =
; aij =  .
.
Обозначают
aij(t)+Rij(xj)=aigo(t) (7) и записывают уравнение (6) с учетом выражения (7):
xi = ai1ox1 + ai2ox2 +...+ ainoxn (8)
Как видно из уравнения (6), значения коэффициентов в выражении (8) зависят от входного сигнала нелинейным образом и от времени. Таким образом, уравнение (8) - линейное дифференциальное уравнение с существенно нестационарными параметрами.
Получен очень важный результат, заключающийся в том, что любой нелинейный нестационарный объект может быть точно представлен в виде существенно нестационарного линейного объекта управления. Это возможно сделать только для класса объектов, нелинейные уравнения динамики которых допускают разложение в ряд Тейлора.
Управление нелинейным нестационарным объектом, следовательно, сводится к управлению существенно нестационарным линейным объектом. Для этого необходимы методы синтеза алгоритмов управления такими объектами, которых в настоящее время не существует, так как традиционные методы синтеза алгоритмов управления всегда сводятся к наложению условий квазистационарности параметров объекта управления. Ниже рассмотрен синтез алгоритма адаптации параметров существенно нестационарной системы управления.
П р и м е р. Рассматривают нестационарный объект управления третьего порядка вида
a + a2
+ a2 + a
+ a + aox = bu1, (9) где ai= ai(t), b = b(t), i =
+ aox = bu1, (9) где ai= ai(t), b = b(t), i =  ,, и регулятор
,, и регулятор
u1= Kix(i)+
Kix(i)+  mju(j); Ki= Ki(t); mj= mj(t). (10)
mju(j); Ki= Ki(t); mj= mj(t). (10)
Из уравнений (9) и (10) следует, что
a + a2
+ a2 + a
+ a + aox = b
+ aox = b
 - Kix(i)+
- Kix(i)+  mju
mju . (11)
. (11)
Задают динамику движения системы (11) в виде
a + a
+ a + a
+ a + a
+ a + b
+ b + b
+ b
Из выражения (11) можно получить следующее эквивалентное уравнение:
(a3+ bK3) + (a2+ bK2)
+ (a2+ bK2)  +(a1+ bK1)
+(a1+ bK1)  + (ao+ bKo) x = b
+ (ao+ bKo) x = b mju(j).. (13)
mju(j).. (13)
Если положить k
k a
a ki; (14) то из уравнения (13) получают с учетом уравнений (14) и (12)
ki; (14) то из уравнения (13) получают с учетом уравнений (14) и (12) -
-
 - b
- b ) + (a
) + (a
Равенство (15) выполняется, если обеспечить равенство -
- (16)
(16)
Для определения значений приращений параметров k(t) и m(t) выбирают функцию Ляпунова
V =  + 0,5
+ 0,5 K
K Δm
Δm (17) и находят ее производную
(17) и находят ее производную =
=  [κ(
[κ( +
+  )+ ΔK
)+ ΔK ] +
] + mj· Δmj, (18) где
mj· Δmj, (18) где 


 (19)
(19)
Конкретизируют значения ▿i для нашего случая:
▿i= a - b
- b ; ▿3= a
; ▿3= a - b
- b ; ▿4= a
; ▿4= a . (20)
. (20)
Записывают с учетом выражения (18) значения производных ▿iн: =
=  x(i)+ ΔKix(i+1)-
x(i)+ ΔKix(i+1)-  u(j)- Δmju(j+1), (21) подставляют их с учетом уравнения (20) в выражения (18) и после несложных преобразований получают значение производной функции Ляпунова:
u(j)- Δmju(j+1), (21) подставляют их с учетом уравнения (20) в выражения (18) и после несложных преобразований получают значение производной функции Ляпунова: =
= Ki
Ki + Δmj
+ Δmj +
+ x(i)+
x(i)+  u
u +
+  K
K +
+ m
m , (22) где i и j в произведениях имеют одни и те же значения: i = j; i, j = 0,2 и j = 0 при i > m, чтобы производная функции Ляпунова была отрицательна, обеспечивают
, (22) где i и j в произведениях имеют одни и те же значения: i = j; i, j = 0,2 и j = 0 при i > m, чтобы производная функции Ляпунова была отрицательна, обеспечивают
 (23)
(23)
2 χo = χ = const.
Из условий (23) получают достаточные условия для значений компонент законов настройки параметров k(t) и m(t):

 (24)
(24)
Из выражений (24) записывают алгоритмы адаптации
ΔKi = -  +
+  x(i)dt + ▿ix
x(i)dt + ▿ix
(25)
Δmj= - 
 +
+  u(j)dt + ▿iu
u(j)dt + ▿iu
При ▿i = 0 все составляющие законов настройки параметров в выражениях (25) обращаются в ноль, значит, ▿i = 0 - положение устойчивого равновесия. Коэффициенты усиления при каждой составляющей можно установить различные χo , χ1 , χ2. Кроме того, в законе управления можно получить и релейные, и степенные составляющие, например для Δki можно записать
ΔKi= - 
 ΔKi= - Sign
ΔKi= - Sign  . (26)
. (26)
Полученные в выражениях (25) и (26) алгоритмы изменения параметрических приращений являются требуемыми для устойчивости системы управления, а не реальные параметрические отклонения. Поэтому для реализации контура адаптации, использующего параметрическую отрицательную обратную связь, записывают
ki(t) = ki(to) - Δkiн(t);
mj(t) = mj(to) + Δmjн(t), где Δkiн(t) и Δ mjн(t) - алгоритмы адаптации параметров регулятора, которые полагают равными

 b(t)>0
b(t)>0
На этом синтез алгоритмов адаптации параметра нестационарной нелинейной системы управления окончен.
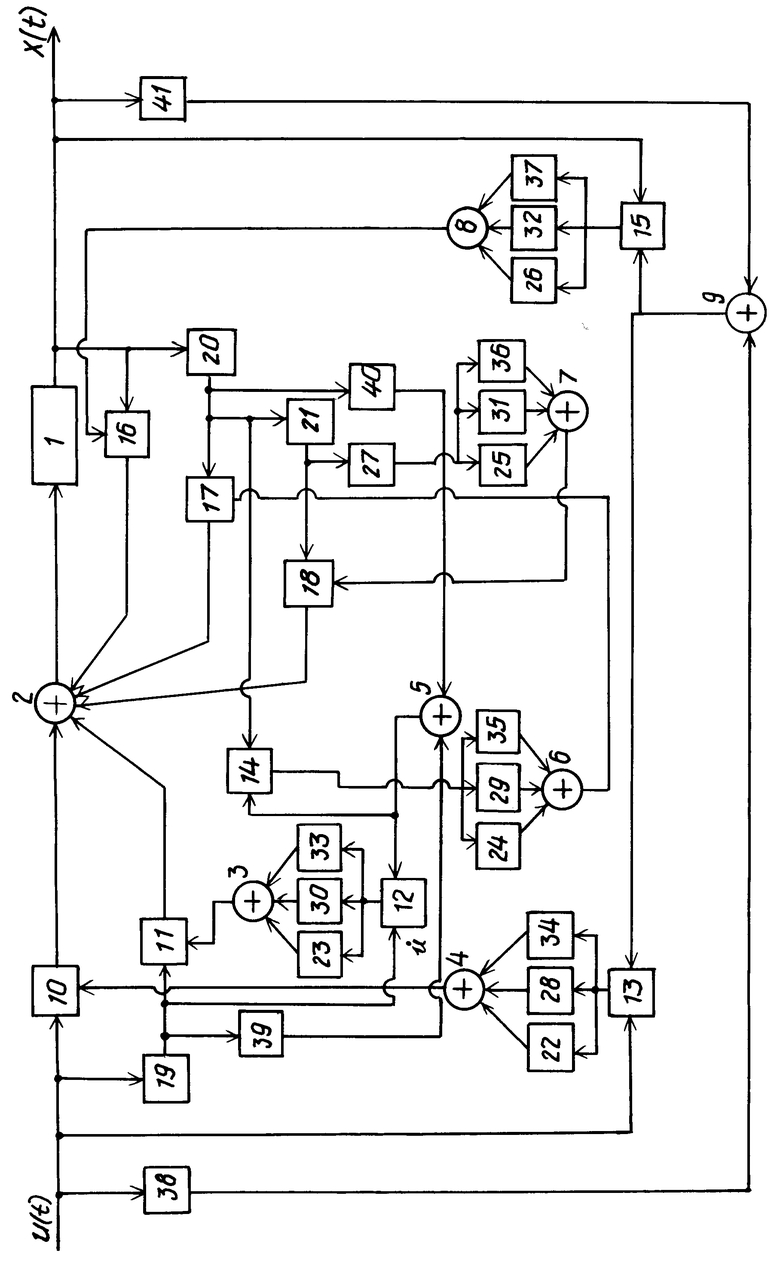
На чертеже представлена функциональная схема системы управления нестационарным нелинейным объектом второго порядка. Она содержит объект 1 управления, сумматоры 2-9, блоки 10-18 умножения, дифференциаторы 19-26, квадратор 27, блоки 28-32 возведения в степень, интеграторы 33-37, усилители 38-41.
Работает система следующим образом.
На вход системы поступает входной сигнал u(t), проходит через блок 10 умножения и последовательно соединенные дифференциатор 19 и блок 11 умножения и поступает на два суммирующих входа сумматора 2. На три вычитающих входа сумматора 2 поступают сигналы обратных связей по положению, по скорости и по ускорению выходного сигнала объекта 1 управления с выходов соответственно блоков 16, 17 и 18 умножения. На вторые входы блоков 10, 11, 16, 17 и 18 умножения поступают сигналы с выходов идентичных по структуре блоков настройки параметров. Например, для настройки коэффициента усиления сигнала u(t) на второй вход блока 10 умножения поступает сигнал с выхода сумматора 4, на один вход которого подается постоянный сигнал номинального значения коэффициента усиления mo(t) (на схеме не показан, так как это реализуется как смещение в схемном исполнении сумматора). Сигнал настройки определяется как произведение сигнала ▿1(t), который получается на выходе сумматора 9. на входы которого поступают сигналы u(t) и x(t) после масштабирования в усилителях 38 и 41, и сигнала u(t). Операция умножения реализуется в блоке 13 умножения. Затем этот сигнал с выхода блока 13 интегрируется, дифференцируется, возводится в нечетную степень и подаются полученные сигналы на вход сумматора 4, в котором к постоянному сигналу m добавляется сигнал Δmн(t). Блок настройки параметра при сигнале обратной связи x(t) содержит тот же набор блоков с идентичными связями (блоки 15, 26, 32, 37, 41 и 9), только на второй вход блока 15 умножения поступает сигнал x(t).
Сигнал настройки для блоков 11 и 17 формируют из сигнала ▿2(t) с выхода сумматора 5 и сигналов  (t) и
(t) и  (t), подаваемых на входы блоков 12 и 14 умножения. Пропорциональные, интегральные и степенные составляющие получаются с помощью блоков 23, 30 и 33 для блока 11 умножения и блоков 24, 29, 35 для блока 17. Сумматоры 3 и 6 формируют для блоков 11 и 17 сигналы, пропорциональные параметрам, которые необходимо установить для усиления сигналов
(t), подаваемых на входы блоков 12 и 14 умножения. Пропорциональные, интегральные и степенные составляющие получаются с помощью блоков 23, 30 и 33 для блока 11 умножения и блоков 24, 29, 35 для блока 17. Сумматоры 3 и 6 формируют для блоков 11 и 17 сигналы, пропорциональные параметрам, которые необходимо установить для усиления сигналов  (t) и
(t) и  (t).
(t).
Особенностью контура настройки параметров составляющей обратной связи  (t) является то, что ▿3(t) формируется только из сигнала
(t) является то, что ▿3(t) формируется только из сигнала  , поэтому он содержит вместо блока умножения квадратор 27. Остальные элементы работают аналогично описанным контурам - блоки 25, 31, 36, 7.
, поэтому он содержит вместо блока умножения квадратор 27. Остальные элементы работают аналогично описанным контурам - блоки 25, 31, 36, 7.
Настройка параметров в сумматорах 3-8 производится до тех пор, пока ▿i не обратится в ноль.
Таким образом, получены алгоритмы адаптации параметров ki(t) и mj(t) новой структуры, позволяющие производить координацию только тех параметров, которые отличаются от заданных моделью, и не настраивать параметры системы, которые не отличаются от заданных.
Введение степенной и дифференциальной составляющих в контур адаптации параметров увеличивает точность и быстродействие системы. Синтез алгоритмов адаптации не требует введения условия квазистационарности параметров объекта управления. Алгоритм адаптации применимы как при изменении параметров ai(t), так и параметров bi(t). Новый подход к синтезу алгоритмов адаптации, основанный на идее параметрической обратной связи с использованием второго метода Ляпунова, позволяет с применением покомпонентного метода формирования составляющих алгоритма адаптации получить дополнительно к релейной и интегральной составляющим степенную и дифференциальную составляющие.
Важным результатом является и то, что система управления применима для нелинейных и нестационарных объектов управления при значительных отклонениях реального движения системы от невозмущенного. Традиционными методами не удается синтезировать систему управления нелинейными нестационарными объектами при значительных отклонениях реального движения от невозмущенного без использования операции линеаризации и введения условия квазистационарности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
| Система адаптивного управления | 1991 |
|
SU1807446A1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2010 |
|
RU2445671C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ | 1990 |
|
RU2027211C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| Адаптивная система управления | 1991 |
|
SU1807447A1 |
Изобретение относится к адаптивным системам управления нелинейными нестационарными объектами. Цель изобретения - упрощение системы, повышение ее точности и расширение области применения, которая достигается тем, что система дополнительно содержит с третьего по седьмой сумматоры, пять блоков возведения в степень, четыре усилителя и квадратор. 1 ил.
СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ, содержащая последовательно соединенные первый блок умножения, первый сумматор, объект управления, выход которого является выходом системы и подключен через второй блок умножения и последовательно соединенные первый дифференциатор и третий блок умножения соответственно к второму и третьему входам первого сумматора, второй и третий дифференциаторы через четвертый и пятый блоки умножения подключены соответственно к четвертому и пятому входам первого сумматора, вход системы соединен с первыми входами первого и шестого блоков умножения, выход системы подключен к первому входу седьмого блока умножения, второй вход которого соединен с выходом второго сумматора и вторым входом шестого блока умножения, выходы шестого - девятого блоков умножения соединены с входами первого - четвертого интеграторов соответственно, пятый интегратор и с четвертого по восьмой дифференциаторы, отличающаяся тем, что в нее введены с третьего по седьмой сумматоры, пять блоков возведения в степень, четыре усилителя и квадратор, подключенный входом к выходу третьего дифференциатора, а выходом соединенный через седьмой дифференциатор, пятый блок возведения в степень и пятый интегратор с первым - третьим входами восьмого сумматора, подключенного выходом к свободному входу пятого блока умножения, вход и выход системы через первый и второй усилители подключены соответственно к первому и второму входам второго сумматора, вход системы соединен с входом второго дифференциатора, подключенного выходом к первому входу восьмого блока умножения и через третий усилитель к первому входу третьего сумматора, второй вход которого соединен с выходом четвертого усилителя, а выход подключен к второму входу восьмого блока умножения и первому входу девятого блока умножения, выход первого дифференциатора соединен с входами четвертого усилителя, третьего дифференциатора и вторым входом девятого блока умножения, выход которого соединен с входами шестого дифференциатора и четвертого блока возведения в степень, выходы которых и выход четвертого интегратора соединены соответственно с первым, вторым и третьим входами седьмого сумматора, подключенного выходом к свободному входу третьего блока умножения, выход шестого блока умножения соединен с входами четвертого дифференциатора и первого блока возведения в степень, выходы которых и выход первого интегратора соединены соответственно с первым, вторым и третьим входами четвертого сумматора, подключенного выходом к свободному входу первого блока умножения, выход седьмого блока умножения соединен с входами восьмого дифференциатора и второго блока возведения в степень, выходы которых и выход второго интегратора соединены соответственно с первым, вторым и третьим входами пятого сумматора, выход которого подключен к свободному входу второго блока умножения, выход восьмого блока умножения соединен с входами пятого дифференциатора и третьего блока возведения в степень, выходы которых и выход третьего интегратора соединены соответственно с первым, вторым и третьим входами шестого сумматора, подключенного выходом к свободному входу четвертого блока умножения.
| Громыко В.Д., Санковский Е.А | |||
| Самонастраивающиеся системы с моделью | |||
| М.: Энергия, 1974, с.16, рис.2. |
