1
Изобретение относится к автоматизации горных машин, а именно к автоматизации их направленного вождения с учетом их положения относительно видимой границы между извлекаемым пластом и вмещающими породами.
Цель изобретения - повышение точности контроля положения видимой границы между пластом и породой за счет слежения непосредственно по привязке к видимой границе контакта пласта и породы, имеющих разные составляющие коэффициента отражения и подавления помех.
Способ слежения за положением видимой границы между пластом и породой заключается в следующем.
Сначала генерируют излучение. Затем его линейно поляризуют и фазовращают . Отраженное от объекта наблю- дения, содержащего видимую границу контакта между пластом и породой, излучение обратно фазовращают и линейно поляризуют. Затем в полученном излучении выделяют узкую спектральну область. В ней на фотокатоде формируют изображение, которое делят на центрально-симметричные квадранты. Потом формируют электрические сигналы в зависимости от яркости изображения на квадрантах фотокатода. Эт сигналы сравнивают между собой, в зависимости от их соотношения судят о положении видимой границы между
5
0
пластом и породой и формируют соответствующие команды управления.
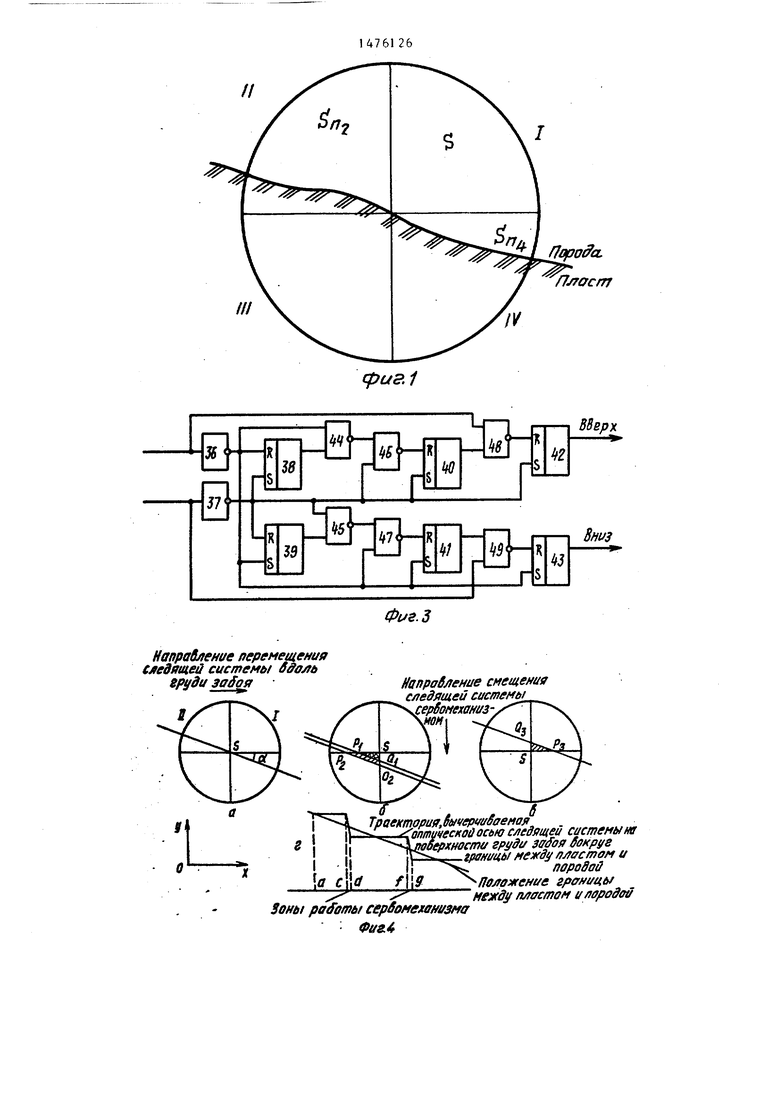
На фиг. 1 дана схема фотокатода, разделенного на 4 части, на который сфокусировано изображение участка груди забоя, содержащее границу между пластом и породой; на фиг. 2 - принципиальная схема устройства; на фиг.З- схема блока управления сервомеханизмом; на фиг. 4 - смещение границы раздела пласта и породы при движении горной машины и траектория, вычерчиваемая оптической осью следящей системы; на фиг. 5 и 6 - временные диаграммы работы устройства.
Блок-схема устройства для осуществления способа слежения за положением видимой границы между пластом и породой, представленная на фиг. 2, содержит источник 1 света, световой поток от которого, проходя через оптическую систему, состоящую из объектива 2, поляроида 3 и фазовращателя (четвертьволновой пластины 4), падает на участок груди забоя, содержащий искомую границу между пластом и породой. Отраженный оптический сигнал, последовательно проходя через установленный с возможностью поворота и фиксации для настройки на объект наблюдения (грудь забоя) фазовращатель 5, поляроид 6, узкополосный оптический фильтр 7 и объектив 8, фокусируется на фотокатод 9 приемного устройства, разделенный на 4 независимых центрально-симметричных квадранта.
Фототоки от квадрантов поступают на 4-канальный усилитель 10 сигналов Сигналы с выходов усилителя поступают на входы преобразователя 11 ток- напряжение. Сигналы от I и III квадрантов с выходов преобразователя 11 поступают на вычитатель 12, а от IV и II квадрантов - на вычитатель 13. Сигналы с выходов вычитателей 12 и 13 через диодные мосты 14 и 15 поступают на компаратор 16, управляющий работой коммутаторов 17 и 18. На входы коммутатора 1 7 поступают сигналы с выходов I и II преобразователя 11, соответствующие I и II квадрантам, а на входы коммутатора 18 - соответственно сигналы с выходов III и IV преобразователя 11. Выходы коммутаторов 17, 18 соединены с входами электронных ключей 19 и 20, которые при подаче на них управляющего напряжения пропускают сигналы с выходов коммутаторов 17 и 18 на элементы 21 и 22 памяти. На первые входы вычитателей 23 и 24 подаются сигналы с выходов ( блоков 17 и 18,
прохождения через оптическую систему (объектив 2, поляроид 3 и четвертьволновая пластина 4) приобретает круговую, допустим, правую поляризацию и падает на участок груди забоя, содержащий искомую границу. Свет, рассеянный в обратном направлении на частицах пыли, будет иметь протиO воположную поляризацию, так же как и часть света, зеркально отраженного от груди забоя, а часть света, диф- фузно отраженного от груди забоя, оказывается деполяризованной. Отра-
5 женный от груди забоя и частиц пыли в направлении на фотоприемник световой -поток проходит через фазовращатель 5 и поляроид 6 таким образом, что часть его, имеющая поляризацию,
0 противоположную исходной, на фотокатод 9 не пройдет. Таким образом, фотокатод 9 будет реагировать только на свет, диффузно отраженный от поверхности груди забоя и имеющий ту
5 же поляризацию, что и световой поток осветителя. Пропущенный через фазовращатель 5 и поляроид 6 световой поток проходит далее через узкополосной оптический фильтр 7, выбранный: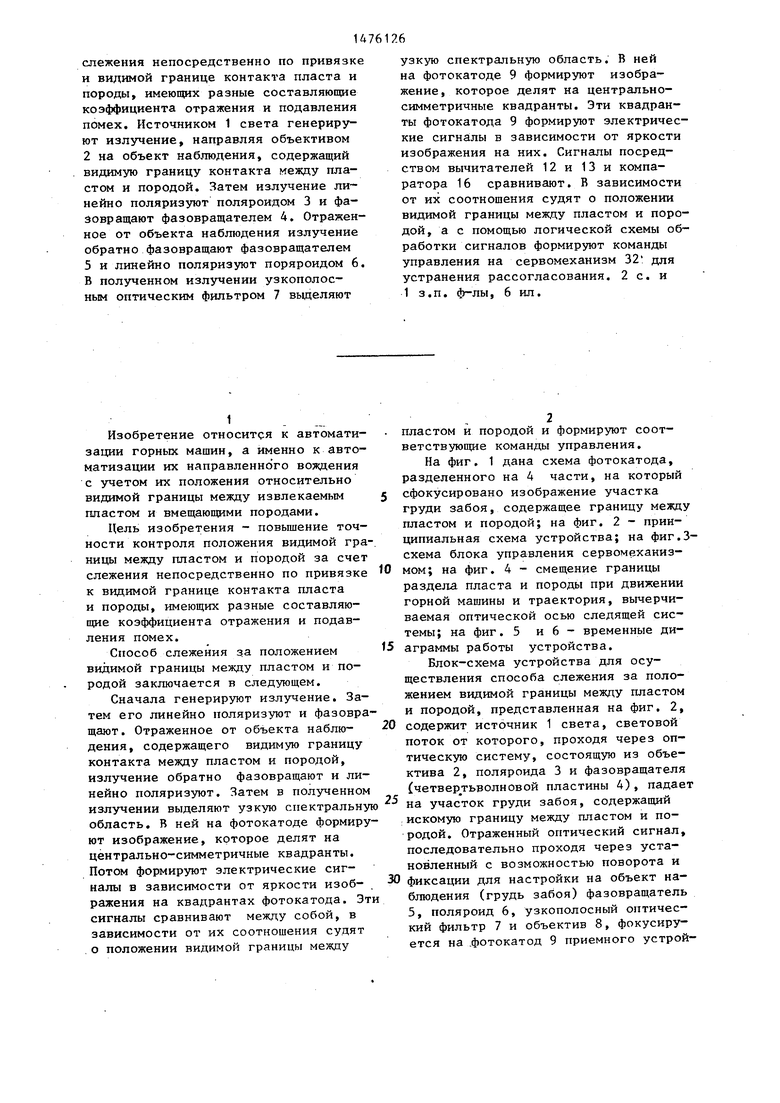


| название | год | авторы | номер документа |
|---|---|---|---|
| Прецизионный спектрополяриметр | 1990 |
|
SU1742635A1 |
| Устройство слежения за информационной дорожкой оптического носителя информации | 1990 |
|
SU1777172A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1989 |
|
SU1841038A1 |
| Стереоцветная телевизионная система | 1983 |
|
SU1188910A1 |
| Телевизионное поисково-следящее устройство | 1977 |
|
SU682880A1 |
| Устройство для центрирования изображений объектов | 1990 |
|
SU1836697A3 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ИЗДЕЛИЯ | 1992 |
|
RU2011163C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1983 |
|
SU1141990A1 |
| Устройство автоматической фокусировки | 1979 |
|
SU851315A1 |
Изобретение относится к автоматизации горных машин, а конкретно к автоматизации их направленного вождения с учетом их положения относительно видимой границы между извлекаемым пластом и вмещающими породами. Цель изобретения - повышение точности контроля положения видимой границы между пластом и породой за счет слежения непосредственно по привязке и видимой границе контакта пласта и породы, имеющих разные составляющие коэффициента отражения и подавления помех. Источником 1 света генерируют излучение, направляя объективом 2 на объект наблюдения, содержащий видимую границу контакта между пластом и породой. Затем излучение линейно поляризуют поляроидом 3 и фазовращают фазовращателем 4. Отраженное от объекта наблюдения излучение обратно фазовращают фазовращателем 5 и линейно поляризуют поляроидом 6. В полученном излучении узкополосным оптическим фильтром 7 выделяют узкую спектральную область. В ней на фотокатоде 9 формируют изображение, которое делят на центрально-симметричные квадранты. Эти квадранты фотокатода 9 формируют электрические сигналы в зависимости от яркости изображения на них. Эти сигналы посредством вычитателей 12 и 13 и компаратора 16 сравнивают. В зависимости от их соотношения судят о положении видимой границы между пластом и породой, а с помощью логической схемы обработки сигналов формируют команды управления на сервомеханизм 32 для устранения рассогласования. 2 с. и 1 з.п. ф-лы, 6 ил.
а на вторые входы - сигналы с выходив OQ исходя из максимума разности коэффиячеек элементов 21 и 22. Сигналы с выходов вычитателей 23 и 24 поступают на компараторы 25 и 26, порог срабатывания которых устанавливается задатчиками 27 и 28. При срабатывании компаратора 25 сигнал с его выхода поступает на вход линии 29 задержки, а компаратора 26 - на вход линии 30 задержки. Линия 29 и 30 задержки управляют работой ключей 19 и 20 и блока 31 управления сервомеханизмом 32, кинематически связанным с фотоприемником, включающим элементы 5-9, и электрически через кинематическую связь
35
40
циентов отражения пласта и породы в области полосы пропускания, и, сфокусированный объективом 8 на фотокато 9, преобразуется в электрические сигналы. Электрические сигналы от квадрантов фотоприемника через усилитель 10 и преобразователь 11 поступают на вычитатели 12 и 13, формирующие сигналы, пропорциональные разностям фототоков -1 от первого и третьего квадрантов и от второго и четвертого квадрантов соответственно, которые после прохождения ерез диодные мосты 14 и 15 сравниваются
с датчиком 33 положения серв-омеханиз- ., по модулю компаратором 16. Компара-
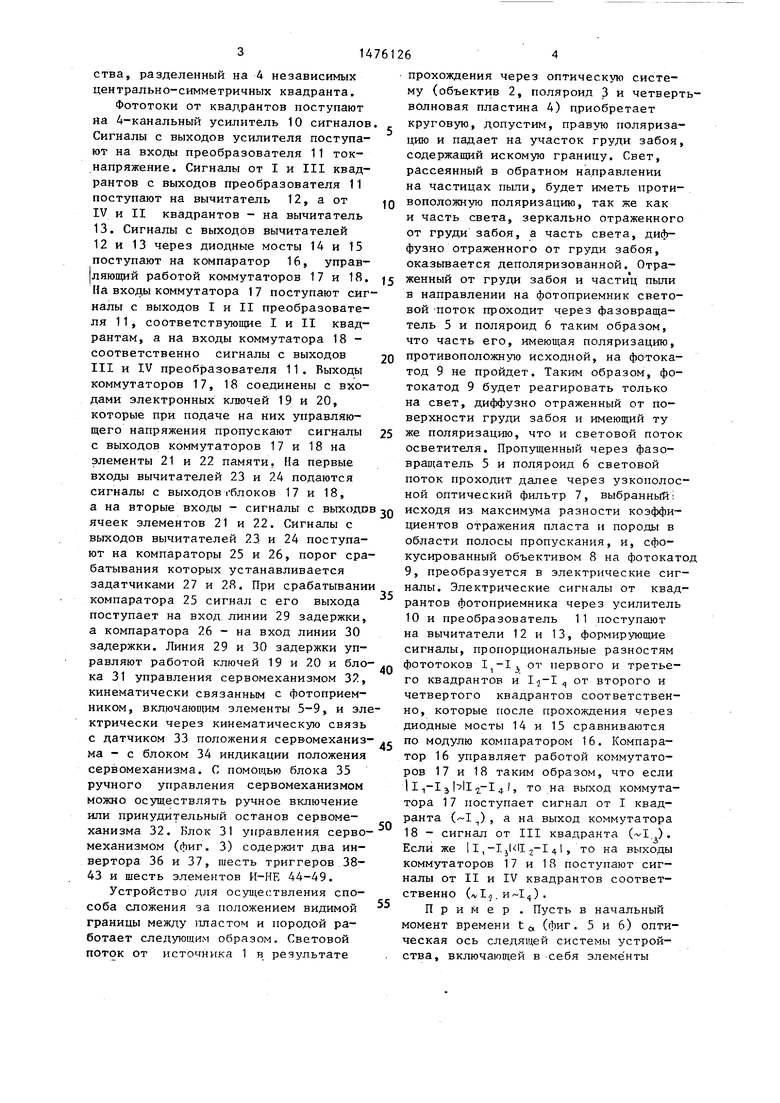
ма - с блоком 34 индикации положения сервомеханизма. С помощью блока 35 ручного управления сервомеханизмом можно осуществлять ручное включение или принудительный останов сервомеханизма 32. Блок 31 управления сервомеханизмом (фиг. 3) содержит два инвертора 36 и 37, шесть триггеров 38- 43 и шесть элементов И-НЕ 44-49.
Устройство для осуществления способа сложения за положением видимой границы между пластом и породой работает следующим образом. Световой поток от источника 1 в результате
50
55
тор 16 управляет работой коммутаторов 17 и 18 таким образом, что если 11 .,-1 з I ll 7-1 4 то на выход коммутатора 17 поступает сигнал от I квадранта (1я), а на выход коммутатора 18 - сигнал от III квадранта (1). Если же 11,-IjMI 2-I4 I, то на выходы коммутаторов 17 и 18 поступают сигналы от II и IV квадрантов соответственно CvI5 . ) .
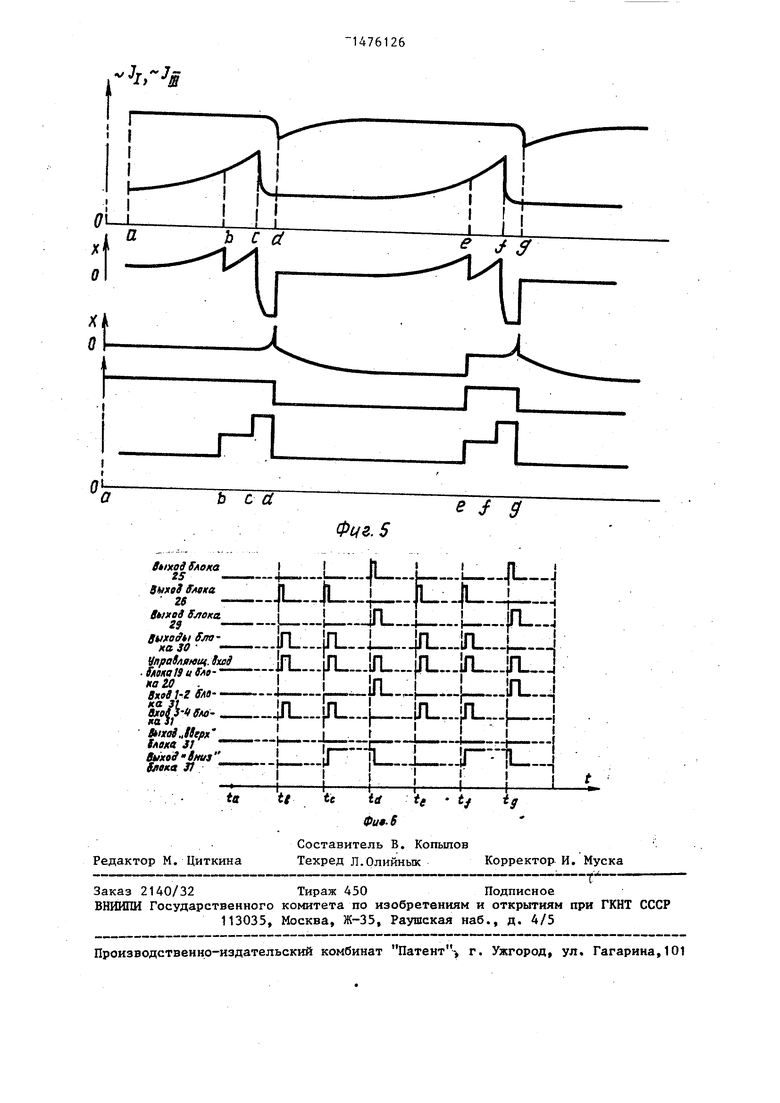
Пример . Пусть в начальный момент времени ta (фиг. 5 и 6) оптическая ось следящей системы устройства, включающей в себя элементы
5
0
циентов отражения пласта и породы в области полосы пропускания, и, сфокусированный объективом 8 на фотокатод 9, преобразуется в электрические сигналы. Электрические сигналы от квадрантов фотоприемника через усилитель 10 и преобразователь 11 поступают на вычитатели 12 и 13, формирующие сигналы, пропорциональные разностям фототоков -1 от первого и третьего квадрантов и от второго и четвертого квадрантов соответственно, которые после прохождения ерез диодные мосты 14 и 15 сравниваются
0
5
тор 16 управляет работой коммутаторов 17 и 18 таким образом, что если 11 .,-1 з I ll 7-1 4 то на выход коммутатора 17 поступает сигнал от I квадранта (1я), а на выход коммутатора 18 - сигнал от III квадранта (1). Если же 11,-IjMI 2-I4 I, то на выходы коммутаторов 17 и 18 поступают сигналы от II и IV квадрантов соответственно CvI5 . ) .
Пример . Пусть в начальный момент времени ta (фиг. 5 и 6) оптическая ось следящей системы устройства, включающей в себя элементы
5-9, заключенные в единую оболочку, проходит через видимую границу между пластом и породой. Предположим также что направление движения системы слежения осуществляется с постоянной скоростью вдоль направления ОХ на фиг. 4, которому параллельна граница между II и III, I и IV квадрантами. Предположим, что граница между пластом и породой прямолинейна и составляет угол ti с направлением движения следящей системы, а ее изображение, сфокусированное объективом 8 на фотокатод 9, находится во II и IV квадрантах (фиг. 4а). В соответствии с алгоритмом II,-I3Iv I2-I4f max на выходе компаратора 16 будет такой сигнал (0 или 1, в зависимости от порядка подключения к компаратору элементов 12-14 и 13-15 и соотношения уровней сигналов между ними), чтобы, если 11,-IjMlj-I I, что имее место в рассматриваемом случае, на выход коммутатора 17 подавался сигнал , пропорциональный фототоку от I квадранта, а на выход коммутатора 18 - сигнал, пропорциональный фототоку от III квадранта.
Ключи 19 и 20 разомкнуты. Пусть элементы 21 и 22 памяти выдают соответственно на входы вычитателей 23 и 24 сигналы, равные сигналам на выходах коммутаторов 17 и 18 в момент
ЧПри перемещении системы слежения вдоль груди забоя в направлении ОХ граница между пластом и породой на изображении, сфокусированном на фотокатод 9, сместится в нижнюю полуплоскость таким образом (фиг. 4б), что фототек от III квадранта изменится на величину, пропорциональную произведению разности коэффициентов диффузного отражения породы и пласта (рп Ряд) и площади SP-.Q „ приходящейся в пределах III квадранта на породу. Полагая, что (рп- упд) const, имеем 41 S s , s sp,Q, пропорциональна квадрату величины смещения оптической оси фотоприемника от видимой границы между пластом и породой. Под смещением понимается кратчайшее расстояние от оптической оси до видимой границы между пластом и породой. Как только сигнал, пропорциональный изменению фототока dla, формируемый на выходе вычитателя 24, превысит пороговое значение, задаваемое блоком 28, компаратор 26 выдаст сигнал на вход линии 30 задержки. Линия 30 задержки спустя время Т д () выдаст импульс длительностью Т2(Т2 ) на второй вход блока 31 и на управляющие входы ключей 19 и 20. В результате этого
в элементах 21 и 22 памяти за время Т происходит перезапись значений сигналов с выходов коммутаторов 17 и 18, на выходах элементов 21 и 22 сигналы становятся равными сигналам
5 на выходах коммутаторов 17 и 18 соответственно, на выходах вычитателей 23 и 24 значения сигналов становятся равными нулю, и сигнал на выходе компаратора 26 исчезает. Блок 31 зао помнил, что на ее второй вход по- ступил первый импульс. На диаграммах (фиг. 5 и 6) этому соответствуют точки b и t6 соответственно. Дальнейшее продвижение устройства слежения
5 в этом направлении приводит к дальнейшему опусканию границы между пластом и породой относительно точки S (фиг. 46). Как только граница опустится до уровня (Рг0.г на фиг. 46, -ss,p,a) когда приращение сигнала к сигналу на выходе блока 18 в момент времени tB достигнет порога срабатывания компаратора 26. Момент выдачи второго сигнала на вход линии 30 задержки обозначен t c. Процесс выдачи импульса длительностью Тj линией задержки повторяется, как и в предыдущем случае, с той разницей, что импульс, второй рач подряд поданный
о на второй вход блока 31, инициирует на втором выходе блока 31 вниз появление сигнала на включение сервомеханизма 32 на опускание устройства слежения.
Останов сервомеханизма осуществит0
5
0
5
5
ся, если на первый вход блока 31 поступит блокирующий импульс. Это произойдет, когда оптическая ось следующей системы пересечет контролируемую границу контакта между пластом и породой, а сама граница сместится в I квадрант, как это показано на фиг.4в. Как только изменение фототока от I квадранта за счет смещения в его область участка пласта достигнет порогового значения, линия 29 задержки выдаст сигнал на управляющие входы ключей 19 и 20 и на первый вход блока 31, в результате чего сервомеханизм
32 останавливается. Этому соответствуют точки d и td на фиг. 5 и 6. Если наклон границы между пластом и породой не изменится, то при дальнейшем движении устройства слежения вдоль груди забоя, согласно фиг. 4, граница снова сместится в III квадрант и процесс повторится (точкам Ь, с, d соответствуют точки е, f, g на фиг. 5, а точкам tB, tj, td соответствуют точки tt, t B, tg на фиг. 6). На фиг. 4г изображена траектория, вычерчиваемая оптической осью следящей системы на
поверхности груди забоя вокруг границы 5 дамой границы между пластом и поромежду пластом и породой.
Если угол at между направлением перемещения следящей системы вдоль груди забоя и границей между пластом и породой в плоскости изображения изменится, например уменьшится, то при этом при постоянной скорости перемещения следящей системы вдоль груди забоя, увеличатся расстояния, продой, основанный на генерировании излучения, освещении им объекта наблюдения, содержащего видимую границу контакта между пластом и породой, 20 формировании изображения объекта наблюдения, формировании электрических сигналов в зависимости от яркости изображения, сравнении их и формировании команд управления, о т л и дой, основанный на генерировании из лучения, освещении им объекта наблю дения, содержащего видимую границу контакта между пластом и породой, 20 формировании изображения объекта на блюдения, формировании электрически сигналов в зависимости от яркости изображения, сравнении их и формиро вании команд управления, о т л и ходимые вдоль груди забоя устройством 25чающийся тем, что, с целью
слежения между включениями сервомеханизма 32, а также время между этими включениями. При изменении направления наклона границы между пластом и породой при ее прохождении через I и III квадранты, изменится соотношение между значениями I 1,-131и таким образом, что I1,-13Н|11-141 и компаратор 16 переключится таким образом, что на выходе коммутатора 17 будет сигнал от II квадранта, а на выходе коммутатора 18 - сигнал от IV квадранта. Обработка сигналов с выходов коммутаторов 17 и 18 ведется по аналогии с описанной выше с той разницей, что при смещении устройства слежения в том же направлении, что и на фиг. 4, сигнал на включение сервомеханизма 32 будет формироваться на первом выходе вверх блока 31. Во всех рассмотренных случаях пороги срабатывания компараторов 25 и 26 выбираются такими, что отклонения системы слежения от границы между пластом и породой не превышали допустимых значений, определяемых точностью ведения комбайна.
Следует отметить, что при описании работы устройства предполагалось, что коэффициенты диффузного
отражения пласта и породы рг
и
Рп
соотносятся между собой рп, с рп . Поэтому ИСХОДЯ ИЗ ТОГО, ЧТО I .,7 1
при прохождении границы, как это
изображено на фиг. 1, при построении диаграммы на фиг. 5 подразумевалось, что на выходе вычитателя 23 формируется разность между сигналом с выхода элемента 21 памяти и сигналом с выхода коммутатора 17 (11(21)- U(17)), а на выходе вычитателя 24 - разность между сигналом с выхода коммутатора 18 и сигналом с выхода элемента 22 памяти (U(18)-U(22)). Формула изобретения
0
0
повышения точности контроля положения видимой границы между пластом и породой за счет слежения непосредственно по привязке к видимой границе контакта пласта и породы, имеющих разные составляющие коэффициента отражения и подавления помех, генерированное излучение линейно поляризуют и фазовращают, относительно него 5 отраженное от объекта наблюдения излучение обратно фазовращают и линейно поляризуют, выделяют в нем узкую спектральную область, в которой формируемое изображение делят на центрально-симметричные квадранты, в зависимости от соотношения яркостей которых судят о положении видимой границы между пластом и породой.
5
0
5
за счет слежения непосредственно по привязке к видимой границе контакта пласта и породы, имеющих разные составляющие коэффициента отражения и подавления помех, в оптической системе осветителя последовательно после объектива установлены поляроид и фазовращатель, в оптической системе фотоприемника последовательно до объектива установлены фазовращатель, поляроид И узкополосный фильтр, а также введены преобразователь ток - напряжение, четыре вычитателя, два диодных моста, два компаратора, два коммутатора, два электронных ключа, два элемента памяти, задатчик, две линии задержки, блок ручного управления сервомеханизмом, датчик положения сервомеханизма и блок индикации, вход которого через датчик положения сервомеханизма соединен с выходом сервомеханизма, к соответствующим входам которого подключён блок ручного управления сервомеханизмом, кроме того, фотокатод фотоприемника разделен на четыре центрально-симметричных квадранта, выходы которых через усилитель и преобразователь ток-напряжение соединены соответственно с первыми входами первого вычитателя и первого коммутатор вторыми входами второго вычитателя и первого коммутатора, вторыми входами первого вычитателя и второго коммутатора, первыми входами второго вычитателя и второго коммутатора, выходы первого и второго вычитателей соединены соответственно через перв и второй диодные мосты с первым и вторым входами третьего компаратора, выход которого соединен с управляющими входами первого и второго коммутаторов, выходы которых соединены соответственно с входами первого и второго электронных ключей, выходы которых соответственно через первый и второй элементы памяти соединены с первыми входами третьего и четвертого вычитателей, вторые входы которых соответственно соединены с выходами первого и второго коммутаторов, а выходы - с вторыми входами первого
0
5
0
5
0
5
0
и второго компараторов соответственно, выходы которых соединены с входами соответственно первой и второй линий задержки, первые выходы которых объединены и соединены с управляющими входами первого и второго электронных ключей, а вторые входы соединены соответственно с первым и вторым входами блока управления сервомеханизмом, выход второго задатчика соединен с первым входом второго компаратора.
//
///
Направление перемещения следящей системы бдоль груди за f оя
}
1 Трасктория.бычерчиёаемая
Ъ - - оптической осью следящей системы на % моерхности груда заЛя fottpys
между мостом и 1| породой
,g С tiff Положение границы
между пласт он и породой
Зоны сербомсхамзма
Фиг.4
flOpoffa,
Пласт
IV
фиа1
ВВврх
Фиг.З
Напрабление смещение следящей системы сербомсханиз-.
Фце.5
e j 9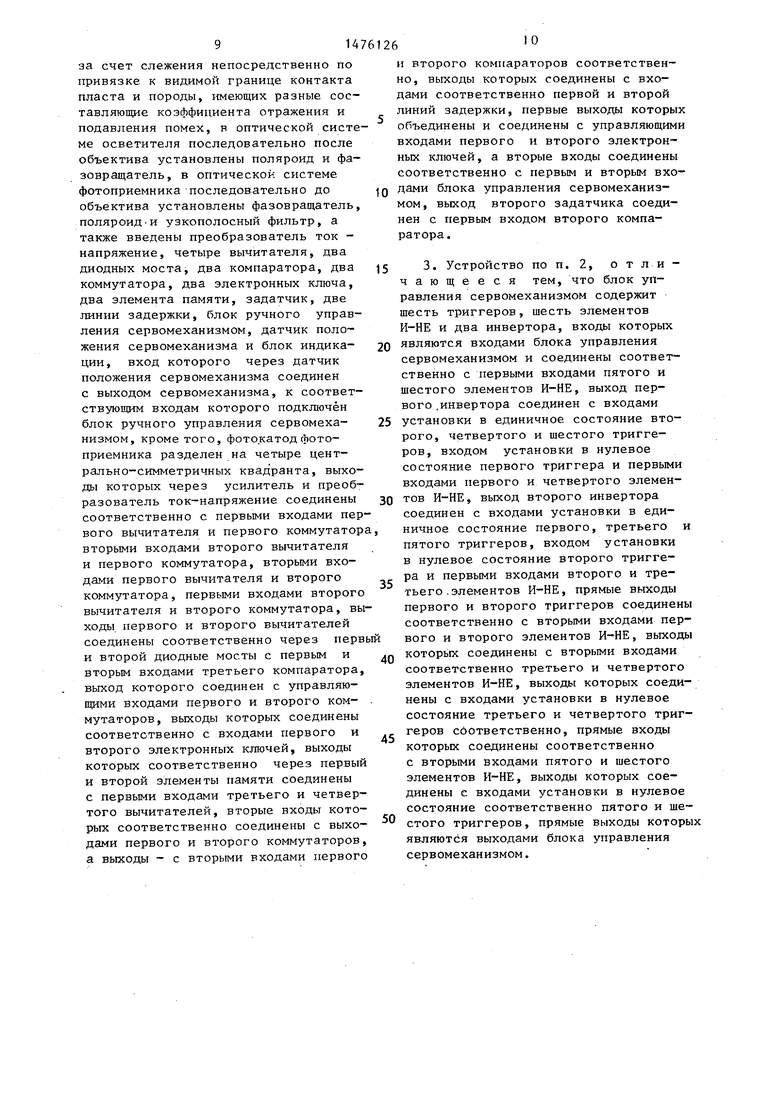
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Двухканальный светоприемник для управления положением машины | 1978 |
|
SU723124A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
