которой соединен с сервомеханизмом, кинематически связанным с объективом и электрически ссединеннььм со схемой срав1;ения, к которой подключензадатчик допустимой точности ведения комбайна, а выход схемы сравнения соединен со схел-шй выработки :комаид управления, лричем синхронизатор нодк,л1очен к узлу сканирования и к схеме оперативного запоминания и сравнения и . пульсов.
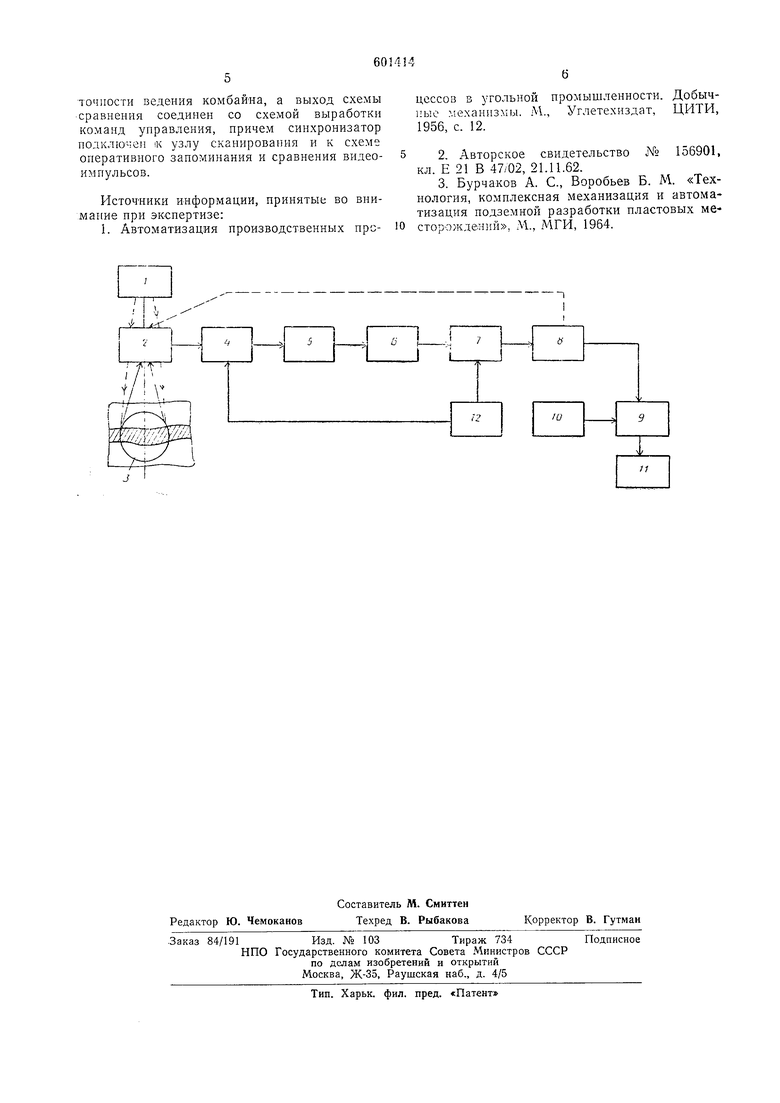
На чертеже приведена блок-схема предлагаемого устройства.
Источник света / через объектив 2 освещает участок пласта 3 с контролируемым прослойком Породы, отличающемся по цвету от осповного пласта. Отраженный световой поток через узел сканирования 4 поступает па фотоэлемент 5, который соединен с усилителем 6. Усил1итель 6 шодключен « схеме 7 оперативного запоминания и сравнения видеоим1пульсо;В, которая подключена IK сервомеханизму 8, кинематически связанному с объективом 2 и электрически - со схемой сравнения Я к которой подключен задатчик 10 допустимой точности ведения (комбайна. Выход схемы .сравнения 9 соединен со схемой // выработки команд управления на изменение положения исполнительного органа комбайна (на чертеже не показан). Синхронизатор J2 .подключен к узлу сканирования 4 и схеме 7 оперативного запоминания и сравнения видеоимпульсов.
Устройство работает следующим образом. В момент нахождения комбайна точно в заданном положении световой поток, поступающий через объектив 2 на ззел сканирования 4, разделяется попола м. При этом изображение контролируемой полосы также разделяется пополам. Вследствие этого иа монотонно изменяющемся участке сиектральной характеристики фотоэлемента 5 формируются равные электрические сигналы (.видеоимпульсы), которые через усилитель 6 поступают на схему 7 олератнвного запоминания и сравнения, на выходе которой сигнал рассогласования будет равен нулю. Се,р;Вомеханизм в этом случае остается в исходном положении. Синхроиизатор J2 обеспечивает одновременную параллельность работы узла сканирования 4 и схемы 7 оперативного запоминания и сравнения.
При отклонении комбайна от контролируемой прослойки пласта 3 происходит смещение изображения контролируемой полосы Б одну из половин плоскости изображения объектива 2 и на фотоэлементе формируются сигналы разной величины. При этом в один период времени «а фотоэлемент 5 падает отраженный световой поток одной длины волны, а в другой лериод -времени - другой длины волны. Таким образом, работая на монотонно изменяющемся участке спектральной хара1ктеристи.ки фотоэлемента 5 с существенно различной чувствительностью к разным длинам волн, получаем различные значения
тока фотоэлемента 5, что позволяет отличать контролируемый прослоек по цвету и по контрастности. Схемой 7 оперативного запоминания и сравнения вырабатывается сигнал рассогласования, амплитуда .которого зависит от величины смещения контролируемого прослойка пласта 3 в -вертикальной плоскости относительно .комбайна, а полярность определяет направление смещения. Этот сигнал .поступает на сервомеханизм 8, который перемещает объектив 2 до тех пор, пока рассогласование не станет равным нулю, обеспечивая таким образом непрерывное автономное слежение за контролируемым прослойком пласта 3 независимо от положения комбайна, сглаживая все незначительные изменения залегания пласта, которые не в состоянии отработать комбайн. При смещении комбайна относительно контролируемого прослойка на величину,
большую допустимой, определяемую задатчнком 10 точности ведения комбайс-га, схема // выработки команд управлени5; подаст с;агналы на исполнительные органы комбайна, обеспечивая тем самы.м автоматическое движение
комбайна по гипсометрии пласта.
Формула изобретения
1.Способ автоматического вождения горного комбайна по гипсометрии пласта, основанный на фотометрическом методе, заключающемся в освещении участка пласта источником света, преобразовании отраженных световых сигналов в электрические, их усилении
и выдаче команд управления на исполнительный орган комбайна, отличающийся тем, что, с целью повыщения точности и надежности вождения комбайна, осуществляют автономное слежение за положением границ
раздела пласта, например прослойков породы, распознавая их по цвету и контрастности путем сканирования изображения участка плзста с известной цветовой последовательностью чередующихся прослойков породы,
формирования ступенчатых видеоимпульсов на монотонно изменяющемся участке спектральной характеристики фотоэлектрического преобразователя, оперативного запоминания, сравнения, интегрирования электрических сигналов со смежных прослой-ков и последующего их сравнения с заданным допуском на точность ведения ,комбай|на.
2.Устройство для осуществления способа по п. 1, содержащее источник света, объектив,
фотоэлемент, усилитель и схему выработки команд управления, отличающееся тем. что оно снабжено узлом сканирования, синхронизатором, серво.механизмом, задатчиком допустимой точности ведения комбайна, схемой сравнения, схемой оперативного запоминания и сравнения видеоимпульсов, выход которойсоединен с сервомеханизмом, кинематически связанным с объективом и электрически соединенным со схемой сравнения, к которой также подключен задатчик ДОПУСТИМОЙ
точности ведения комбайна, а выход схемы сравнения соединен со схемой выработки команд управления, причем синхронизатор подключен iK узлу скапнровапия и к схеме оперативного запоминания и сравнения видеоимпульсов.
Источники информации, принятые во внимание при экспертизе:
1. Автоматизация производственных про6
цессов S угольной промышленности. Добычпые механизмы. М., Углетехиздат, ЦИТИ, 1956, с. 12.
2.Авторское свидетельство № 156901, кл. Е 21 В 47Ю2, 21.11.62.
3.Бурчаков А. С., Воробьев Б. М. «Технология, комплексная механизация и автоматизация подземной разработки пластовых месторождеянй, М., МГИ, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| Способ слежения за положением видимой границы между пластом и породой и устройство для его осуществления | 1987 |
|
SU1476126A1 |
| Устройство для контроля положения горно-проходческого комбайна относительно открытой границы "каменная соль-сильвинит | 1980 |
|
SU883416A1 |
| Устройство для автоматического вождения горного комбайна относительно границы раздела двух твердых сред | 1980 |
|
SU941574A1 |
| Устройство контроля положения самоходной машины относительно ориентирующего слоя | 1985 |
|
SU1288297A1 |
| Устройство автоматического контроля положения горного комбайна в профиле пласта | 1988 |
|
SU1617140A1 |
