(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ГОРНОГО КОМБАЙНА ПО ГИПСОМЕТРИИ ПЛАСТА
1
Изобретение относится к автоматизации горных машин, в частности к автоматизации их направленного вождения в соответствии с гипсометрией пласта.
По основному авт. св. № 601414 известно устройство, осуш,ествляюш,ее способ автоматического вождения горного комбайна по гипсометрии пласта, основанный на распознавании границ раздела пласта по цвету и контрастности. Устройство осушествляет сканирование изображения участка пласта с известной цветовой последовательностью чередующихся прослойков породы, формирование ступенчатых видеоимпульсов на монотонно изменяющемся участке спектральной характеристики фотоэлектрического преобразователя, оперативное запоминание, сравнение, интегрирование электрических сигналов со смежных прослойков и последующее их сравнение с заданным допуском на точность вождения комбайна. Устройство включает источник света, через объек-. ТИБ освещающий участок пласта с контролируемым прослойком породы, фотоэлемент, воспринимающий отраженный световой поток через объектив, узел сканирования, синхронизатор, усилитель, сервомеханизм, задатчик допустимой точности ведения комбайна, схему сравнения, схему оперативного
5 запоминания и сравнения видеоимпульсов и схему выработки команд управления. Выходной сигнал с фотоэлемента через усилитель поступает на схему оперативного запоминания и сравнения видеоимпульсов, которая подключена к сервомеханизму, кинема ° тически связанному с объективом и электрически - со схемой сравнения, к которой подключен задатчик допустимой точности вождения комбайна. Выход схемы сравнения соединен со схемой выработки команд управ,5 ления на изменение положе;ния исполнительного органа комбайна. Синхроннай работа узла сканирования и схемы оперативного запоминания и сравнения видеоимпульсов осуществляется синхронизатором. В известном устройстве вывод на прослоек области
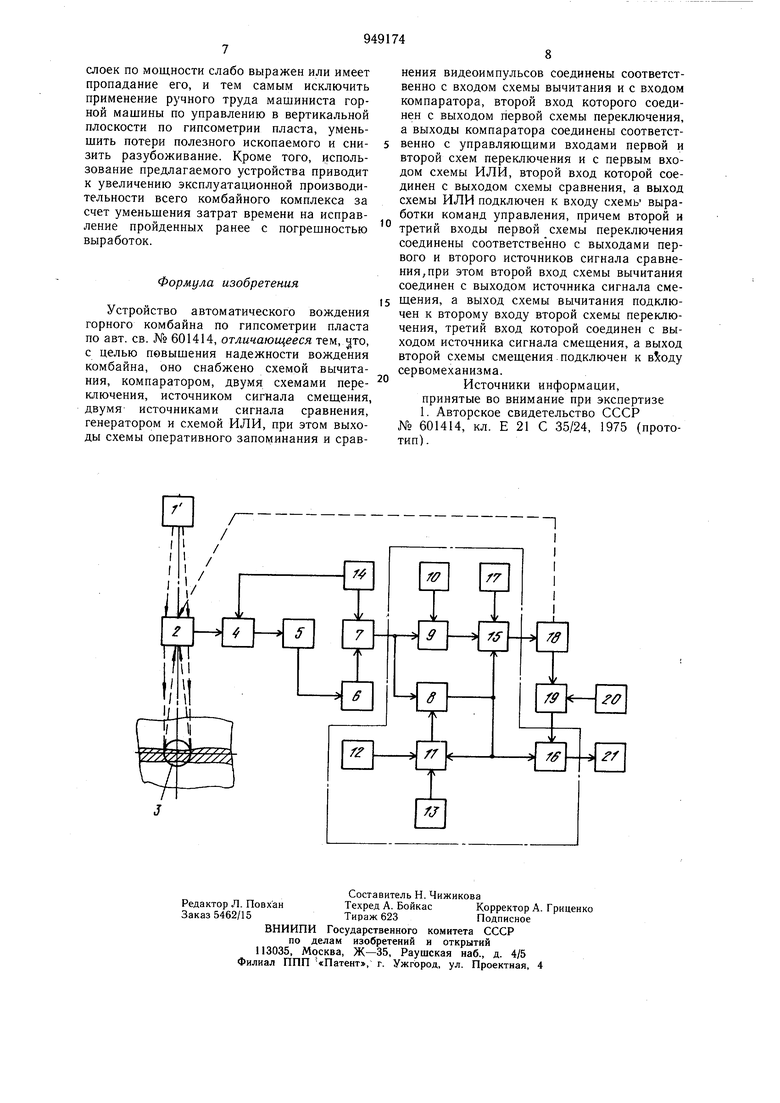
° обзора объектива осуществляется путем подачи напряжения соответствующего знака со схемы оперативного запоминания и сравнения на сервомеханизм, что производится оператором вручную (1). В случаях изменения цветовой окраски чередующихся прослойков, уменьшения их контрастности, кратковременного замещения прослойка основным слоем, частичного или полного исчезновения прослойка, защтыбовки участка прослойка, а также воздейстВИЯ внещних возмущающих факторов происходит смещение объектива с контролируемой области. После исчезновения возмущающего воздействия для вывода объектива на контролируемый прослоек необходимо вмещательство оператора (мащиниста). Таким образом, известное устройство при наличии перечисленных возмущающих факторов становится неработоспособным. Целью изобретения является повыщение надежности вождения комбайна при наличии возмущающих факторов, приводящих к смещению обектива с контролируемого прослойка. Поставленная цель достигается тем, что устройство снабжено схемой вычитания, компаратором, двумя схемами переключения, источником сигнала смещения, двумя источниками сигнала сравнения, генератором и схемой ИЛИ, при этом выходы схемы оперативного запоминания и сравнения видеоимпульсов соединены соответственно с входом схемы вычитания и с входом компаратора, второй вход которого соединен с выходом первой схемы переключателя, а выходы компаратора соединены соответственно с управляющими входами первой и второй схем переключения и с первым входом схемы ИЛИ, второй вход которой соединен с выходом схемы сравнения, а выход схемы ИЛИ подключен ко входу схемы выработки команд управления, причем второй и третий входы первой схемы переключения соединены соответственно с выходами первого и второго источников сигна за сравнения, при этом второй вход схемы вычитания соединен с выходом источника сигнала смещения, а выход схемы вычитания подключен ко второму входу второй схемы переключения, третий вход которой соединен с выходом источника сигнала смещения, а выход второй схемы смещения подключен ко входу сервомеханизма. На чертеже изображена блок-схема предложенного устройства. Источник света 1 через объектив 2 освещает участок пласта 3 с контролируемым прослойком породы, отличающимся по цвету от основного пласта. Отраженный световой поток через узел 4 сканирования поступает на фотоэлемент 5, который соединен с усилителем 6. Усилитель 6 подключен к схеме 7 оперативного запоминания и сравнения видеоимпульсов, выход которой соединен с первыми входами компаратора 8 и схемы 9 вычитания. Другие входы схемы 9 вычитания и компаратора 8 соединены соответственно с источником сигнала смещения 10 и через первую схему 11 переключения с первым 12 и вторым 13 источниками сигнала сравнения. Синхронизатор 14 подключен k узлу 4 сканирования и схеме 7 оператичного запоминания и сравнения видеоимпульсов. Выход компаратора 8 соединен с управляющими входами первой схемы 11 переключения и второй схемы 15 переключения, а также с одним из входов схемы 16 ИЛИ. Выход схемы 9 вычитания соединен с одним из входов второй схемы 15 переключения, другой вход которой подключен к генератору 17. Выход второй схемы 15 переключения подключен к сервомеханизму 18, кинематически связанному с объективом 2 и электрически - со схемой 19 сравнения, к которой подключен задатчик 20 допустимой точности ведения комбайна. Выход схемы 19 сравнения соединен с другим входом схемы ИЛИ, выход которой подключен к схеме 21 выработки команд управления на изменение положения исполнительного органа- комбайна. В предложенном устройстве область обзора объектива располагается относительно прослойка таким образом, что интенсивность светового потока верхней области превыщает интенсивность светового потока нижней области обзора объектива. Это обеспечивается источником сигнала смещения, уровень которого И| выбирается из условия превыщения им в несколько раз минимального уровня Изт1п на выходе схемы оперативного запоминания и сравнения видеоимпульсов, способного непосредственно управлять сервомеханизмом при отсутствии возмущающих факторов. При этом на выходе схемы вычитания отрабатывается сигнал И4 Из-И1- Изтт . Уровень первого источника сигнала сравнения HZ выбирается из условия Изтш а уровень второго источника сигнала сравнения И - из условия Компаратор срабатывает при снижении уровня Из на выходе схемы оперативного запоминания и сравнения видеоимпульсов до уровня Иа источника сигнала сравнения и возвращается в исходное состояние при увеличении уровня Из до величины И;. Компаратор управляет работой первой и второй схем переключения, а также через схему ИЛИ - схемой выработки команд на управление. В исходном состоянии компаратора на его вход поступает опорный уровень от первого источника сигнала сравнения, а на сервомеханизм - сигнал со схемы вычитания. При срабатывании компаратора на сервомеханизм поступает сигнал с генератора, на выходе которого формируются разнополярные импульсы, задающие направление движения объектива вверх или вниз, а на вход компаратора опорный уровень от второго источника сигнала сравнения. Длительность импульсов выбирается в соответствии со временем перемещения объектива из одного крайнего положения в другое. Объектив совершает движение вверх и вниз до тех пор, пока область его обзора не выйдет на прослоек, величина сигнала от которого на выходе схемы оперативного запоминания и сравнение достигнет уровня HS, после чего компаратор возвращается в исходное состояние. Устройство .работает следующим образом. В момент нахождения комбайна точно в заданном положении световой поток, поступающий через объектив 2 на узел 4 сканирования, разделяется на две части. Причем площадь изображения контролируемого прослойка представлена в верхней части меньще, чем в нижней. Вследствие этого, на монотонно изменяющемся участке спектральной характеристики фотоэлемента 5 формируются разные электрические сигналы (видеоимпульсы), которые через усилитель 6 поступают на схему 7 оперативного запоминания и сравнения, на выходе которой сигнал рассогласования Из равен уровню И| источника сигнала смещения 10. Когда сигнал Из имеет уровень, превышающий На, компаратор 8 находится в таком соетоянии, при котором через схему 11 переключения на вход компаратора 8 поступает сигнал от источника 12 сигнала сравнения, устанавливая .его порог срабатывания, равным уровню Иа. В то же время компаратор 8 устанавливает схему 15 переключения в положение, при котором на вход сервомеханизма 18 поступает сигнал со схемы 9 вь читания. На выходе схемы 9 йычитания сигнал рассогласования равен нулю, следовательно, сервомеханизм 18 в этом случае остается в исходном положении. Синхронизатор 14 обеспечивает одновременную параллельность работы узла 4 сканирования и схемы 7 оперативного запоминания и сравнения. При отклонении комбайна от заданного положения происходит смещение изображения контролируемой полосы в из половин плоскости изображения объектива 2. При этом в один период времени на фотоэлемент 5 падает отраженный световой поток одной длины волны, а в другой период времени - другой длины волны. Таким образом, работая на монотонно изменяющемся участке спектральной характеристики фотоэлемента 5 с имущественно различной чувствительностью к разным длинам волн, получаем различные значения тока фотоэлемеита 5. На выходе схемы вычитания 9 вырабатывается сигнал рассогласования, амплитуда которого зависит от величины смещения контролируемого прослойка пласта 3 в вертикальной плоскости относительно комбайна, а полярность определяет направление смещения. Этот сигнал через вторую схему 15 переключения поступает на сервомеханизм 18, который перемещает объектив 2 до тех пор, пока рассогласование не станет равным нулю, обеспечивая таким образом непрерывное автономное слежение за контролируемым прослойком пласта 3 независимо от положения комбайна. При смещении комбайна относительно контролируемого прослойка на величину, большую допустимой, определяемую задатчиком 20 точности ведения комбайна, схема 19 сравнения выдает сигнал, который через схему ИЛИ 16 поступает на схему 21 выработки команд управления на изменение положения испо нительного органа комбайна, обеспечивая тем самым автоматическое движение комбайна по гипсометрии пласта. При наличии хотя бы одного из вышеперечисленных возмущающих факторов происходит смещение области обзора объектива с контролируемого прослойка. При этом вся область обзора объектива попадает на основной слой, имеющий однотонную окраску. Следовательно, световые потоки верхней и нижней части равны или отличаются на незначительную величину. Вследствие этого на монотонно .изменяющемся участке спектральной характеристики фотоэлемента 5 формируются равные электрические сигналы, которые через усилитель 6 поступают на.схему 7 оперативного запоминания и сравнения, на выходе которой сигнал рассогласования Из меньше уровня И2 первого источника сигнала сравнения 12. Срабатывает компаратор 8, который переключает вход сервомеханизма 18 к генератору 17, через схему 16 ИЛИ отключает схему 21 выработки команд управления, а также устанавливает порог срабатывания компаратора 18, равным уровню ИБ второго источника 13 сравнения. Таким образом, на сервомеханизм 18 поступают разнополярные импульсы, под действием которых он перемещает объектив 2 вверх или вниз в зависимости от полярности импульса. Такое движение объектива осуществляется до тех пор, пока не устранится возмущающий фактор, т. е. область обзора объектива снова выйдет на устойчивый прослоек и сигнал на выходе схемы 7 оперативного запоминания и сравнения достигнет величины И5. При этом компаратор 8 возвращается в исходное положение и через вторую схему переключения 15 подключает вход сервомеханизма 18 к выходу схемы вычитания 9, а также через первую схему переключения 11 устанавливает порог срабатывания компаратора 8, равным уровню И 2 первого источника 12 сигнала сравнения. В дальнейщем устройство работает в режиме слежения за прослойком. Применение предлагаемого устройства позволяет повысить надежность системы автоматического вождения комбайна по гипсометрии пласта в условиях, когда прослоек по мощности слабо выражен или имеет пропадание его, и тем самым исключить применение ручного труда машиниста горной машины по управлению в вертикальной плоскости по гипсометрии пласта, уменьшить потери полезного ископаемого и снизить разубоживание. Кроме того, использование предлагаемого устройства приводит к увеличению эксплуатационной производительности всего комбайного комплекса за счет уменьшения затрат времени на исправление пройденных ранее с погрешностью выработок.
Формула изобретения
Устройство автоматического вождения горного комбайна по гипсометрии пласта по авт. св. № 601414, отличающееся тем,то, с целью повышения надежности вождения комбайна, оно снабжено схемой вычитания, компаратором, двумя схемами переключения, источником сигнала смещения, двумя источниками сигнала сравнения, генератором и схемой ИЛИ, при этом выходы схемы оперативного запоминания и сравнения видеоимпульсов соединены соответственно с входом схемы вычитания и с входом компаратора, второй вход которого соединен с выходом первой схемы переключения, а выходы компаратора соединены соответственно с управляющими входами первой и второй схем переключения и с первым входом схемы ИЛИ, второй вход которой соединен с выходом схемы сравнения, а выход схемы ИЛИ подключен к входу схемь выработки команд управления, причем второй и третий входы первой схемы переключения соединены соответственно с выходами первого и второго источников сигнала сравнения, при этом второй вход схемы вычитания соединен с выходом источника сигнала смещения, а выход схемы вычитания подключен к второму входу второй схемы переключения, третий вход которой соединен с выходом источника сигнала смещения, а выход второй схемы смещения подключен к сервомеханизма.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 601414, кл. Е 21 С 35/24, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| Способ слежения за положением видимой границы между пластом и породой и устройство для его осуществления | 1987 |
|
SU1476126A1 |
| Устройство для автоматического вождения горного комбайна относительно границы раздела двух твердых сред | 1980 |
|
SU941574A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ГРАФИЧЕСКИХ ИЗОБРАЖЕНИИ | 1973 |
|
SU373975A1 |
| Устройство для контроля положения горно-проходческого комбайна относительно открытой границы "каменная соль-сильвинит | 1980 |
|
SU883416A1 |
| Устройство контроля положения исполнительного органа горной машины в профиле пласта | 1982 |
|
SU1051268A1 |
