Фиг. 2
нок 4 вокруг своих осей обеспечивается посредством связи планок 4 с тягами 6. Разравнивающие элементы 5 выполнены V-образными из упругого материала и жестко закреплены на путанках 4 одной из своих ветвей. Подающий транспортер 1 заполняет кормом бункер. Корм располагается в бункере в виде конуса. Привод транспортера 1 включается, когда вершина конуса достигнет разравнивающих элементов 5. Планки 4 поворачиваютс вокруг своей оси, удерживая V-образ
ные элементы в вертикальном положении в период всего оборота вала 2„ После входа элементов 5 в кормовую массу происходит отделение порции корма и „транспортировка ее к стенке бункера Свободная ветвь V-образного элемента 5, установленная под углом по отношению к порции корма, в первоначальный момент обеспечивает движение частиц корма по .горизонтали по поверхности слоя, а по вертикали уплотняет корм. 2 . ф-лы, 5 ил„
| название | год | авторы | номер документа |
|---|---|---|---|
| Самозагружающийся кормораздатчик | 1989 |
|
SU1662454A1 |
| Способ смешивания и выдачи корма животным и устройство для его осуществления | 1985 |
|
SU1327858A1 |
| Питатель- дозатор измельченных кормов | 1985 |
|
SU1384295A1 |
| РАЗДАТЧИК КОРМОВ | 2000 |
|
RU2181242C2 |
| Устройство для разравнивания кормов | 1982 |
|
SU1033092A1 |
| Устройство для раздачи кормов | 1983 |
|
SU1143355A1 |
| Устройство для разравнивания кормов | 1988 |
|
SU1544316A1 |
| РАЗДАТЧИК КОРМОВ | 2006 |
|
RU2333636C2 |
| МАШИНА ДЛЯ ФОРМИРОВАНИЯ КОВРА ПРИ ПРОИЗВОДСТВЕ ЛИГНОУГЛВВОДНЫХ ДРЕВЕСНЫХ ПЛАСТИКОВ | 1973 |
|
SU374204A1 |
| Устройство для разравнивания кормов | 1986 |
|
SU1382455A1 |
Изобретение относится к сельскому хозяйству и обеспечивает повышение равномерности распределения корма путем его уплотнения, а также снижение энергоемкости процесса распределения. Под подающим транспортером 1 параллельно друг другу расположены валы 2 с пальцами 3. Кормораспределяющие решетки выполнены в виде набора планок 4 с разравнивающими элементами 5. Планки 4 шарнирно связаны между собой поперечными тягами 6. С одной стороны тяги 6 соединены с планками 4 посредством рычагов 7 и установлены эксцентрично относительно оси вращения вала 2. Поворот планок 4 вокруг своих осей обеспечивается посредством связи планок 4 с тягами 6. Разравнивающие элементы 5 выполнены V-образными из упругого материала и жестко закреплены на планках 4 одной из своих ветвей. Подающий транспортер 1 заполняет кормом бункер. Корм располагается в бункере в виде конуса. Привод транспортера 1 включается, когда вершина конуса достигнет разравнивающих элементов 5. Планки 4 поворачиваются вокруг своей оси, удерживая V-образные элементы в вертикальном положении в период всего оборота вала 2. После входа элементов 5 в кормовую массу происходит отделение порции корма и транспортировка ее к стенке бункера. Свободная ветвь V-образного элемента 5, установленная под углом по отношению к порции корма, в первоначальный момент обеспечивает движение частиц корма по горизонтали по поверхности слоя, а по вертикали уплотняет корм. 2 з.п. ф-лы, 5 ил.
1
Изобретение относится к сельскому хозяйству, в частности к устройствам для загрузки кормов, преимущественно в кормораздающие машины.
Цель изобретения - повышение равномерности распределения корма путем его уплотнения, а также снижение энергоемкости процесса распределения0
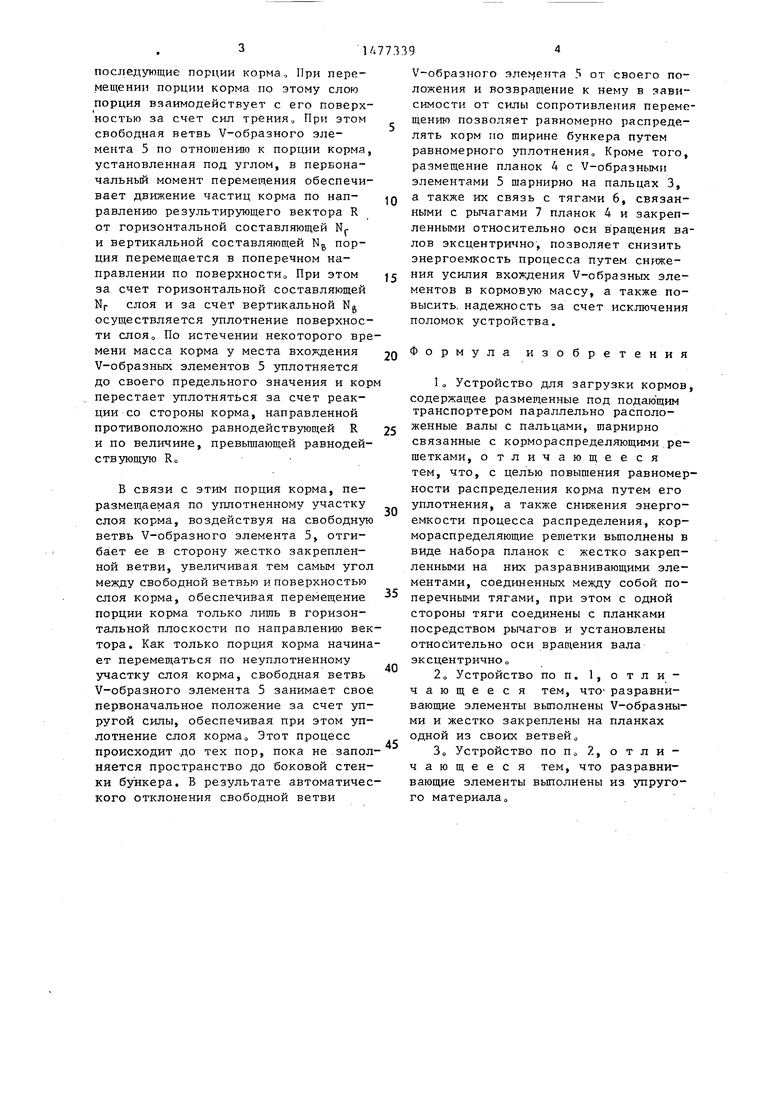
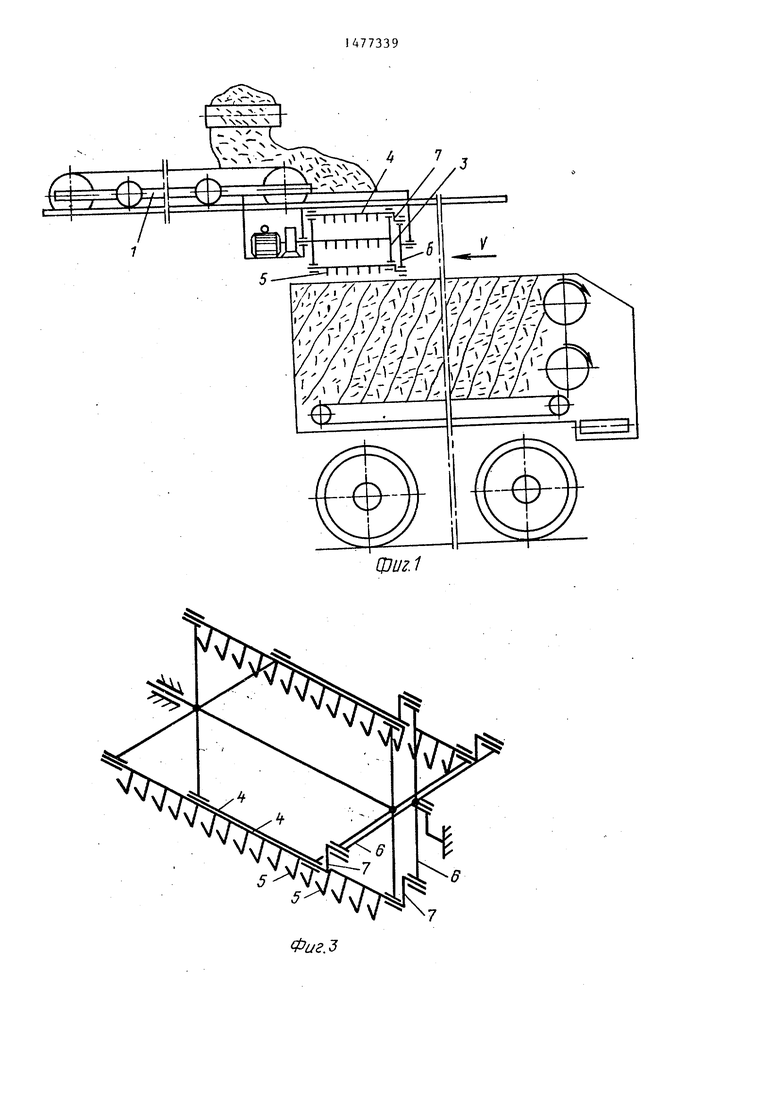
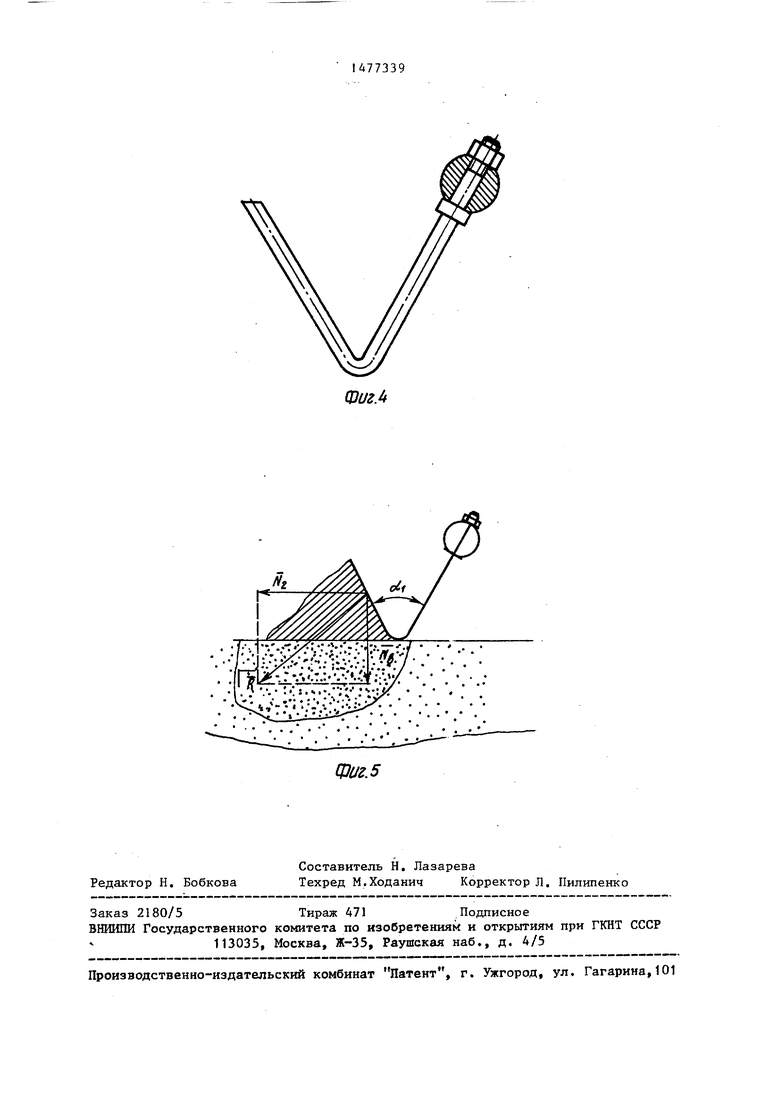
На фиг о 1 показано устройство для загрузки кормов, вид спереди; на фиг. 2 - то же, валы с кормораспределяющими решетками;-на фиг„ 3 - то же, аксонометрия; на фиг. 4 - V-образный элемент;,на фиг 5 - схема взаимодей ствия У-образного элемента с кормом
Устройство для загрузки кормов содержит размещенные под подающим транспортером 1 параллельно расположен- ные валы 2 с пальцами 3„ Валы 2 шар- нирно связаны с кормораспределяющи- ми решетками, которые выполнены в виде набора планок 4 с жестко закрепленными на них разравнивающими элементами 5. Планки 4 шарнирно связаны между собой посредством поперечных тяг 6 о С одной стороны тяги 6 соединены с планками 4 посредством рычагов 7 и установлены относительно оси вращения вала 2 эксцентрично, т.е. со смещением на длину рычага 7.
Разравнивающие элементы 5 выполнены V-образными, жестко закреплены на планках 4 одной из своих ветвей. Разравнивающие элементы 5 выполнены .из упругого материала
Устройство работает следующим образом
Q 5
0
5
0
5
Подающий транспортер 1 ориентируют относительно заполняемой емкости так, что его передняя часть с валами 2 располагается вблизи битеров раздатчика (фиг 1). Корм с транспортера 1 подается в бункер, где располагается в виде конуса с углом у основания, равным углу естественного откоса корма После .того, как вершина конуса достигает разравнивающих V-образных элементов 5 (фиг 1) включается привод транспортера 1 и валов 2 „
При этом V-образные элементы 5 распределяют корм по ширине бункера, а транспортер 1 по его длине При распределении корма в поперечном направлении V-образные элементы 5 входят в кормовой продукт вертикально Это обеспечивается тем, что при повороте вала 2 вокруг своей оси планки 4,-закрепленные на пальцах 3 шарнирно, поворачиваются вокруг своей оси, удерживая V-образные элементы 5 в вертикальном положении в течение всего оборота вала 2 Поворот планок 4 вокруг своих осей обеспечивается за счет связи их с тягами 6, закрепленными эксцентрично относительно оси валов 2 посредством рычагов 7„ После того как V-образныё элементы войдут в кормовую массу, происходит отделение порции корма и ее транспортировка к стенке бункера. По мере заполнения бункера в поперечном направлении под V-образными элементами 5 образуется слой корма, по которому транспортируются
последующие порции корма, При перемещении порции корма по этому слою порция взаимодействует с его поверхностью за счет сил трения. При этом свободная ветвь V-образного элемента 5 по отношению к порции корма, установленная под углом, в первоначальный момент перемещения обеспечивает движение частиц корма по нэп- равлению результирующего вектора R от горизонтальной составляющей Nf и вертикальной составляющей NB порция перемещается в поперечном направлении по поверхности При этом за счет горизонтальной составляющей Nr слоя и за счет вертикальной NJ осуществляется уплотнение поверхности слоя о По истечении некоторого времени масса корма у места вхождения V-образных элементов 5 уплотняется до своего предельного значения и кор перестает уплотняться за счет реакции со стороны корма, направленной противоположно равнодействующей R и по величине, превышающей равнодействующую Ко
В связи с этим порция корма, пе- размещаемая по уплотненному участку слоя корма, воздействуя на свободную ветвь V-образного элемента 5, отгибает ее в сторону жестко закрепленной ветви, увеличивая тем самым угол между свободной ветвью и поверхностью слоя корма, обеспечивая перемещение порции корма только лишь в горизонтальной плоскости по направлению вектора . Как только порция корма начинает перемещаться по неуплотненному участку слоя корма, свободная ветвь V-образного элемента 5 занимает свое первоначальное положение за счет упругой силы, обеспечивая при этом уплотнение слоя корма„ Этот процесс происходит до тех пор, пока не заполняется пространство до боковой стенки бункера. В результате автоматического отклонения свободной ветви
Q $ 0 5
0
5
0
5
V-образного элемента 5 от своего положения и возвращение к нему в зависимости от силы сопротивления перемещению позволяет равномерно распределять корм по щирине бункера путем равномерного уплотнения Кроме того, размещение планок 4 с V-образными элементами 5 шарнирно на пальцах 3, а также их связь с тягами 6, связанными с рычагами 7 планок 4 и закрепленными относительно оси вращения валов эксцентрично, позволяет снизить энергоемкость процесса путем снижения усилия вхождения V-образных элементов в кормовую массу, а также повысить надежность за счет исключения поломок устройства.
Формула изобретения
1„ Устройство для загрузки кормов, содержащее размещенные под подающим транспортером параллельно расположенные валы с пальцами, шарнирно связанные с кормораспределяющими решетками, отличающееся тем, что, с целью повышения равномерности распределения корма путем его уплотнения, а также снижения энергоемкости процесса распределения, кор- мораспределяющие решетки выполнены в виде набора планок с жестко закрепленными на них разравнивающими элементами, соединенных между собой поперечными тягами, при этом с одной стороны тяги соединены с планками посредством рычагов и установлены относительно оси вращения вала эксцентрично„
2 о Устройство по п. отличающееся тем, что- разравнивающие элементы выполнены V-образными и жестко закреплены на планках одной из своих ветвей о
30 Устройство по По 2, о т л и - чающееся тем, что разравнивающие элементы выполнены из упругого материала
1, гпф
ШигЛ
| Дозатор-выгрузчик силоса | 1980 |
|
SU852288A2 |
