1
Изобретение относится к дроблению руд, твердых материалов, а именно к щековым дробилкам, и может быть использовано в производстве строительных материалов, переработке отходов, в горнодобывающей, металлургической, химической и других отраслях промышленности преимущественно при высоком содержании в сырье недробимых масс.
Цель изобретения - повышение экономичности работы дробилки за счет автоматизации прохождения недробимой массы путем экстренного отвода подвижной щеки с распорной плитой и ползуном с последующим восстановлением рабочего режима.
На чертеже показана принципиальная конструктивная схема предлагаемой дробилки с системой управления ею
Дробилка содержит корпус 1 с неподвижной щекой 2 и подвижной щекой 3, приводной эксцентриковый вал 4, маховик 5, насаженный на коренную шейку вала 4. Управляемой муфтой 6 производится соединение маховика 5 с валом 4 для передачи валу крутящего момента и их разъединение
В дробилке простое движение щеки генерируется через известный механизм с шатуном 7 и распорными плитами, из которых плита 8 задней (правой) головкой сочленена через регулировочные пластины 9 с ползу
00 О 00
о оо
ном 10. При этом замыкающая тяга 11 упруго связана непосредственно с ползуном.
Предохранительное устройство выполнено в виде известного шарнирного двухзвен- ника 12 с упором 13 центрального его шарнира и управляемым силовым цилиндром 14 на конце внешнего плеча.
Двухзвенник 12 установлен враспор между ползуном 10 и задней шарнирной опорой, выполненной в виде гидравлической месс- дозы 15, например, мембранного типа.
С блоком 16 управления электрически связаны реверсивный привод транспортера 17 выгрузки продукта из-под дробилки, детектор 18 отгрузки недробимой массы, привод питателя 19, мессдоза 15 обмотки цепей управления муфтой 6 и цилиндром 14.
Детектор 18 может быть выполнен, например, в виде лотка с датчиком, способным регистрировать факт прекращения нагрузки на лоток.
В режиме стабильного дробления питатель 19 загружает сырье в камеру дробления (см.стрелки направлений), а транспортер 17 принимает продукт дробления и направляет его дальше (влево) по технологической цепи. При этом муфта 6 включена, а двухзвен- ник 12 контактирует центральным шарниром с упором 13, прикрепленным к корпусу дробилки. Усилия дробления через распорную систему воспринимаются мессдозой 15.
В экстренном режиме перегрузки, когда в камеру попадает недробимая масса, т. е. порция сырья с недробимым телом, мессдоза 15 посылает в блок 16 сигнал перегрузки. Блок вырабатывает команды на отключение питателя 19, муфты 6, на реверс транспортера 17 вправо и поворот опорного звена двухзвенника 12 цилиндром 14.
Двухзвенник переламывается в положение, показанное пунктиром, щека с плитой (плитами) 8, ползуном 10 и тягой 11 экстренно отводятся вправо, пропуская недробимую массу на транспортер 17, который отгружает ее вправо в отдельную емкость.
Тем самым осуществляется сепарация продукта дробления с целенаправленным выделением обогащенной преимущественно стальными включениями массы. По завершении отгрузки недробимой массы сигнал
от этом с детектора 18 поступает в блок 16, который вырабатывает команду на восстановление рабочего режима. Тогда цилиндр 14 возвращает Двухзвенник в исходное положение до упора 13, тем самым перемещая распорную систему и щеку 3 влево, включается муфта 6 и щека начинает колебаться в номинальном режиме вхолостую.
Реверсируется транспортер 17 и с некоторой задержкой включается питатель 19. Де- тектор 18 может функционировать и по схеме с передачей сигнала обнаружения недробимой массы на лотке в блок 16 через реле времени с необходимой задержкой на период гарантированной отгрузки массы.
Автоматизация процессов пропуска недробимой массы, выделения последней в отдельный технологически ценный поток и восстановления рабочего режима повышает экономичность работы дробилки и сопряженной технологической цепи.
Формула изобретения
Щековая дробилка, содержащая установленный на приводном валу маховик с
5 управляемой муфтой, распорную плиту, сочлененную задней головкой с ползуном, заднюю шарнирную опору, замыкающую тягу, предохранительный шарнирный двухзвенник с управляемым силовым цилиндром и блок управления, отличающаяся чем. что, с целью
0 повышения экономичности работы за счет автоматизации прохождения недробимой массы путем экстренного отвода подвижной щеки с распорной плитой и ползуном с последующим восстановлением рабочего режима, она снабжена реверсивным транспор5 тером выгрузки продукта дробления и детектором отгрузки недробимой массы на реверс, при этом шарнирный двухзвенник установлен враспор между ползуном и шарнирной опорой, последняя выполнена в виде гидравлической мессдозы, а замыкающая тяга связ.ана с ползуном, причем привод транспортера и детектор подключены к блоку управления по каналам соответственно команды на реверс по сигналу от мессдозы и сигнала о завершении отгрузки недробимой массы.
0
С ,
19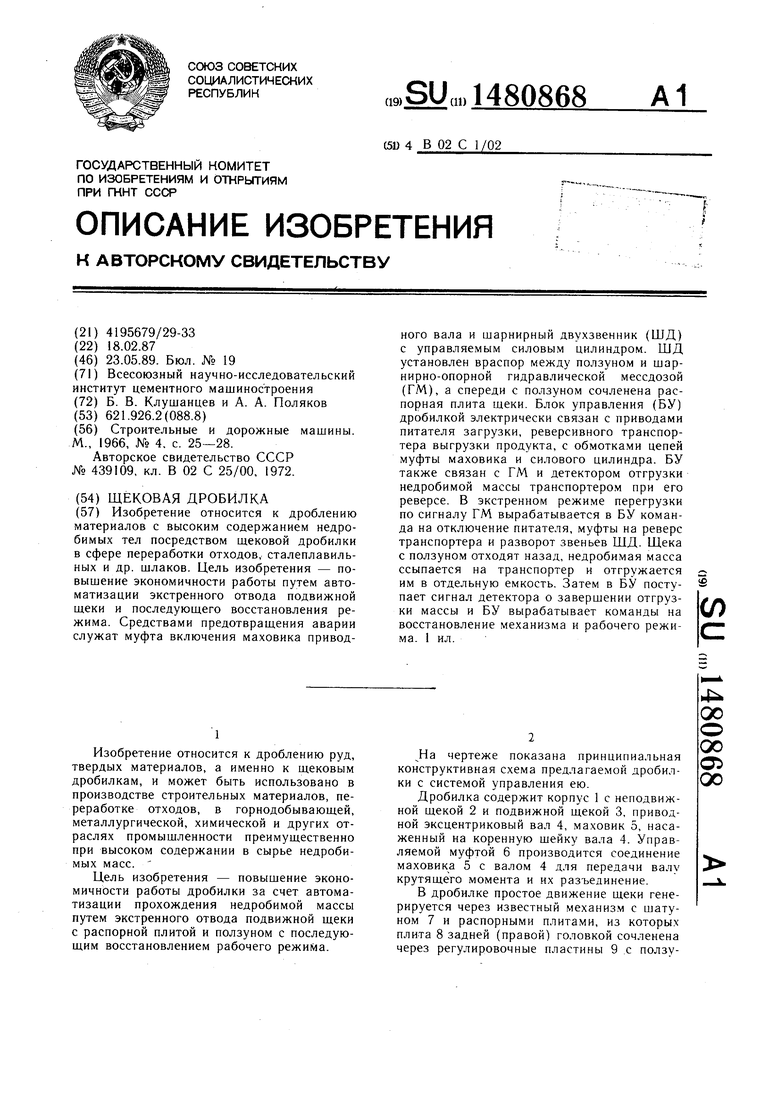

| название | год | авторы | номер документа |
|---|---|---|---|
| Щековая дробилка | 1972 |
|
SU439109A1 |
| Щековая дробилка | 1974 |
|
SU546368A1 |
| ЩЕКОВАЯ ВИБРАЦИОННАЯ ДРОБИЛКА | 1971 |
|
SU299245A1 |
| Щековая вибрационная дробилка | 1987 |
|
SU1766502A1 |
| ЩЕКОВАЯ ДРОБИЛКА | 1991 |
|
RU2044561C1 |
| ЩЕКОВАЯ ДРОБИЛКА | 1991 |
|
RU2043787C1 |
| ЩЕКОВАЯ ДРОБИЛКА | 2012 |
|
RU2508941C1 |
| Распорно-предохранительный механизм щековой дробилки | 1982 |
|
SU1080844A1 |
| Лабораторная щековая дробилка | 1984 |
|
SU1286275A1 |
| ДРОБИЛКА ЩЕКОВАЯ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2003 |
|
RU2246350C1 |

Изобретение относится к дроблению материалов с высоким содержанием недробимых тел посредством щековой дробилки в сфере переработки отходов, сталеплавильных и др. шлаков. Цель изобретения - повышение экономичности работы путем автоматизации экстренного отвода подвижной щеки и последующего восстановления режима. Средствами предотвращения аварии служат муфта включения маховика приводного вала и шарнирный двухзвенник (ШД) с управляемым силовым цилиндром. ШД установлен враспор между ползуном и шарнирно-опорной гидравлической мессдозой (ГМ), а спереди с ползуном сочленена распорная плита щеки. Блок управления (БУ) дробилкой электрически связан с приводами питателя загрузки, реверсивного транспортера выгрузки продукта, с обмотками цепей муфты маховика и силового цилиндра. БУ также связан с ГМ и детектором отгрузки недробимой массы транспортером при его реверсе. В экстренном режиме перегрузки по сигналу ГМ вырабатывается в БУ команда на отключение питателя, муфты на реверс транспортера и разворот звеньев ШД. Щека с ползуном отходят назад, недробимая масса ссыпается на транспортер и отгружается им в отдельную емкость. Затем в БУ поступает сигнал детектора о завершении отгрузки массы и БУ вырабатывает команды на восстановление механизма и рабочего режима. 1 ил.
| Строительные и дорожные машины | |||
| М., 1966, № 4, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Щековая дробилка | 1972 |
|
SU439109A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
