Изобретение относится к машиностроению, в частности к ручным ударным устройствам для обработки различных материалов и деталей давлением при выполнении сборочных разборочных и других монтажных работ, а также удаления гвоздей в строительстве, в металлообрабатывающей отрасли народного хозяйства.
Цель изобретения - улучшение условий эксплуатации и расширение эксплуатационных возможностей, а также повышение эффективности работы за счет надежности захвата извлекаемого гвоздя.
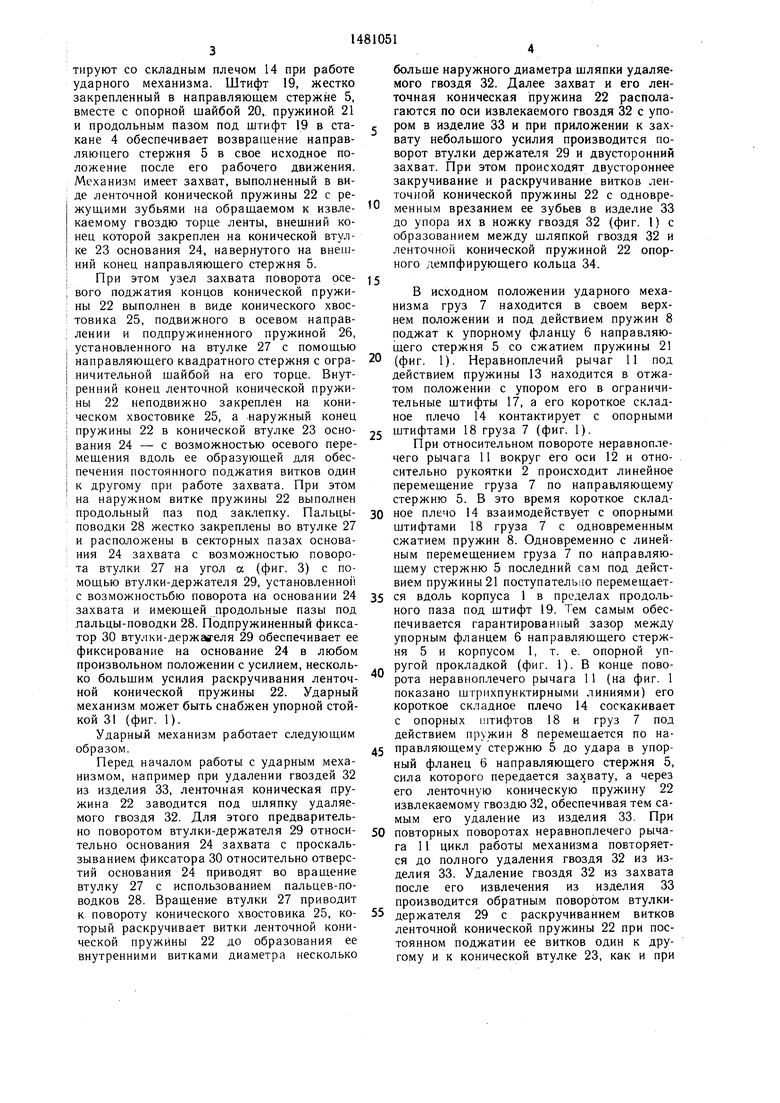
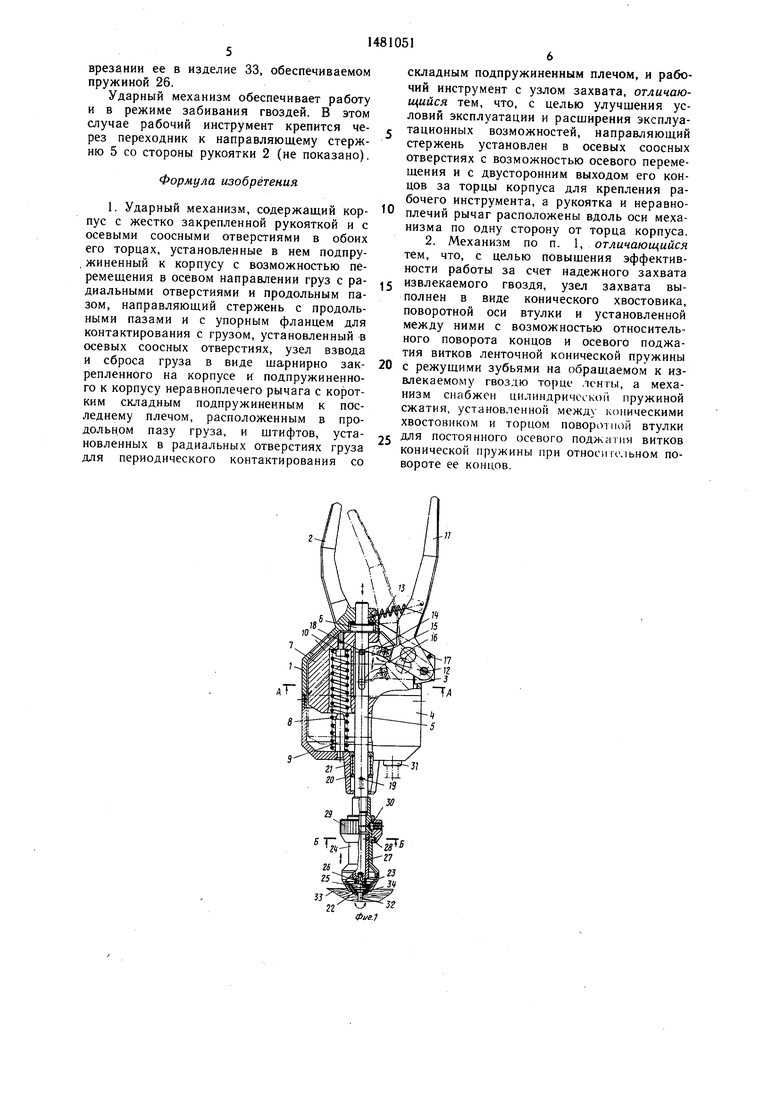
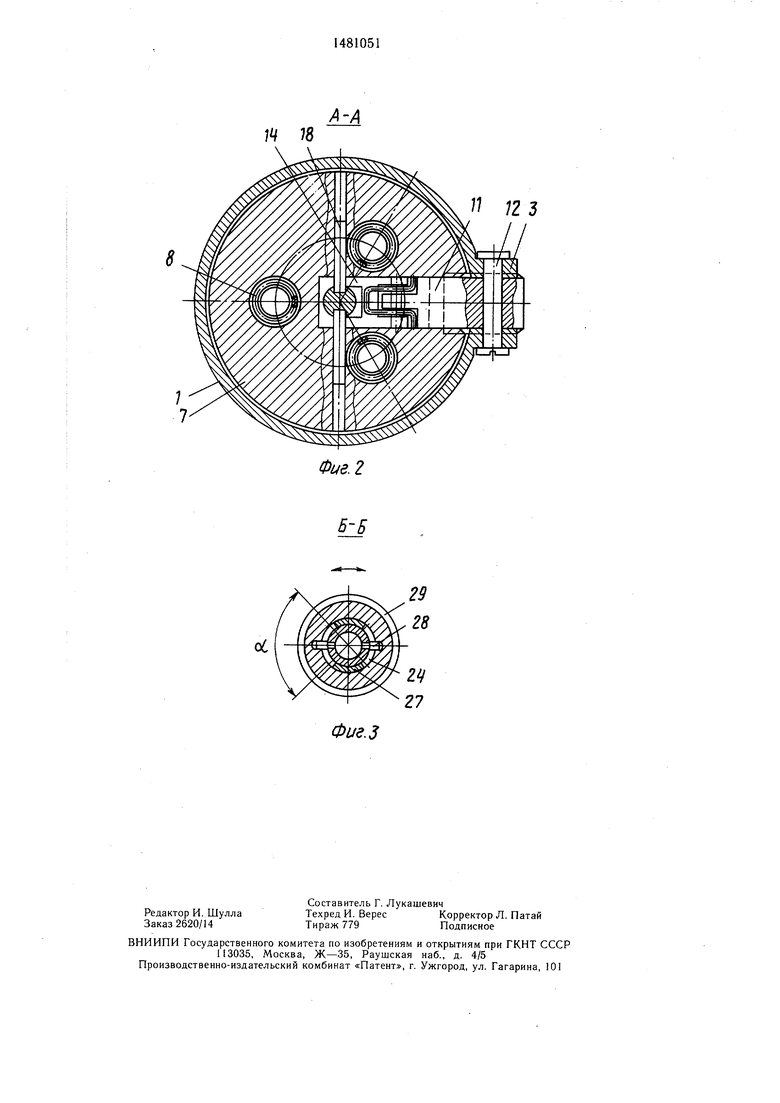
На фиг. 1 изображен ударный механизм, общий вид, разрез; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1.
Ударный механизм содержит корпус 1 цилиндрической формы с жестко закрепленной рукояткой 2, расположенной вдоль оси корпуса 1. Последний имеет вильчатый прилив 3. Стакан 4, навернутый на корпус 1 делает его цельным. В корпусе 1 подвижно установлен направляющий стержень 5 с упорным фланцем 6. Груз 7 установлен в корпусе I с возможностью перемещения по направляющему стержню 5 и поджат относительно корпуса 1 пружинами 8 с центрирующими пальцами 9 и 10. Узел взвода и сброса груза 7 выполнен в виде неравноплечего рычага 11, шарнирно с помощью оси 12 закрепленного в корпусе 1 в его вильчатом приливе 3 и поджатого пружиной 13 к корпусу 1. Неравноплечий рычаг 11 имеет короткое складное плечо 14, расположенное в продольном пазу груза 7. Короткое складное плечо 14 закреплено на неравноплечем рычаге 11 с помощью оси 15 и поджато к его торцовым уступам пружиной 16. Штифты 17 ограничивают обратный поворот неравноплечего рычага 11. Опорные штифты 18 установлены в радиальных отверстиях груза 7 (фиг. 2), выступают за внутренние стенки продольного паза груза 7 и периодически контак4 00
сд
10
тируют со складным плечом 14 при работе ударного механизма. Штифт 19, жестко закрепленный в направляющем стержне 5, вместе с опорной шайбой 20, пружиной 21 и продольным пазом под штифт 19 в стакане 4 обеспечивает возвращение направляющего стержня 5 в свое исходное положение после его рабочего движения. Механизм имеет захват, выполненный в виде ленточной конической пружины 22 с режущими зубьями на обращаемом к извлекаемому гвоздю торце ленты, внешний конец которой закреплен на конической втулке 23 основания 24, навернутого на внешний конец направляющего стержня 5.
При этом узел захвата поворота осе- 15 вого поджатия концов конической пружины 22 выполнен в виде конического хвостовика 25, подвижного в осевом направлении и подпружиненного пружиной 26, установленного на втулке 27 с помощью направляющего квадратного стержня с ограничительной шайбой на его торце. Внутренний конец ленточной конической пружины 22 неподвижно закреплен на коническом хвостовике 25, а наружный конец
20
больше наружного диаметра шляпки удаляемого гвоздя 32. Далее захват и его ленточная коническая пружина 22 располагаются по оси извлекаемого гвоздя 32 с упором в изделие 33 и при приложении к захвату небольшого усилия производится поворот втулки держателя 29 и двусторонний захват. При этом происходят двустороннее закручивание и раскручивание витков ленточной конической пружины 22 с одновременным врезанием ее зубьев в изделие 33 до упора их в ножку гвоздя 32 (фиг. 1) с образованием между шляпкой гвоздя 32 и ленточной конической пружиной 22 опорного демпфирующего кольца 34.
В исходном положении ударного механизма груз 7 находится в своем верхнем положении и под действием пружин 8 поджат к упорному фланцу 6 направляющего стержня 5 со сжатием пружины 21 (фиг. 1). Неравноплечий рычаг 11 под действием пружины 13 находится в отжатом положении с упором его в ограничительные штифты 17, а его короткое складное плечо 14 контактирует с опорными
пружины 22 в конической втулке 23 осно- 25 штифтами 18 груза 7 (фиг. 1). вания 24
с возможностью осевого перемещения вдоль ее образующей для обеспечения постоянного поджатия витков один к другому при работе захвата. При этом на наружном витке пружины 22 выполнен продольный паз под заклепку. Пальцы- поводки 28 жестко закреплены во втулке 27 и расположены в секторных пазах основания 24 захвата с возможностью поворота втулки 27 на угол а (фиг. 3) с помощью втулки-держателя 29, установленной
При относительном повороте неравноплечего рычага 11 вокруг его оси 12 и относительно рукоятки 2 происходит линейное перемещение груза 7 по направляющему стержню 5. В это время короткое склад- 30 ное плечо 14 взаимодействует с опорными штифтами 18 груза 7 с одновременным сжатием пружин 8. Одновременно с линейным перемещением груза 7 по направляющему стержню 5 последний сам под действием пружины 21 поступательно перемещает - с возможностьбю поворота на основании 24 35 ся вдоль корпуса 1 в пределах продоль- захвата и имеющей продольные пазы подного паза под штифт 19. Тем самым обеслальцы-поводки 28. Подпружиненный фиксатор 30 втулки-держад-еля 29 обеспечивает ее фиксирование на основание 24 в любом произвольном положении с усилием, несколько большим усилия раскручивания ленточной конической пружины 22. Ударный механизм может быть снабжен упорной стойкой 31 (фиг. 1).
Ударный механизм работает следующим образом.
Перед началом работы с ударным механизмом, например при удалении гвоздей 32
40
45
из изделия 33, ленточная коническая пружина 22 заводится под шляпку удаляемого гвоздя 32. Для этого предварительпечивается гарантированный зазор между упорным фланцем 6 направляющего стержня 5 и корпусом 1, т. е. опорной упругой прокладкой (фиг. 1). В конце поворота неравноплечего рычага 11 (на фиг. 1 показано штрихпунктирными линиями) его короткое складное плечо 14 соскакивает с опорных штифтов 18 и груз 7 под действием 8 перемещается по направляющему стержню 5 до удара в упорный фланец 6 направляющего стержня 5, сила которого передается захвату, а через его ленточную коническую пружину 22 извлекаемому гвоздю 32, обеспечивая тем самым его удаление из изделия 33. При
но поворотом втулки-держателя 29 относи- 50 повторных поворотах неравноплечего рычательно основания 24 захвата с проскальзыванием фиксатора 30 относительно отверстий основания 24 приводят во вращение втулку 27 с использованием пальцев-поводков 28. Вращение втулки 27 приводит к повороту конического хвостовика 25, который раскручивает витки ленточной конической пружины 22 до образования ее внутренними витками диаметра несколько
55
га 11 цикл работы механизма повторяется до полного удаления гвоздя 32 из изделия 33. Удаление гвоздя 32 из захвата после его извлечения из изделия 33 производится обратным поворотом втулки- держателя 29 с раскручиванием витков ленточной конической пружины 22 при постоянном поджатии ее витков один к другому и к конической втулке 23, как и при
5
0
больше наружного диаметра шляпки удаляемого гвоздя 32. Далее захват и его ленточная коническая пружина 22 располагаются по оси извлекаемого гвоздя 32 с упором в изделие 33 и при приложении к захвату небольшого усилия производится поворот втулки держателя 29 и двусторонний захват. При этом происходят двустороннее закручивание и раскручивание витков ленточной конической пружины 22 с одновременным врезанием ее зубьев в изделие 33 до упора их в ножку гвоздя 32 (фиг. 1) с образованием между шляпкой гвоздя 32 и ленточной конической пружиной 22 опорного демпфирующего кольца 34.
В исходном положении ударного механизма груз 7 находится в своем верхнем положении и под действием пружин 8 поджат к упорному фланцу 6 направляющего стержня 5 со сжатием пружины 21 (фиг. 1). Неравноплечий рычаг 11 под действием пружины 13 находится в отжатом положении с упором его в ограничительные штифты 17, а его короткое складное плечо 14 контактирует с опорными
5 штифтами 18 груза 7 (фиг. 1).
печивается гарантированный зазор между упорным фланцем 6 направляющего стержня 5 и корпусом 1, т. е. опорной упругой прокладкой (фиг. 1). В конце поворота неравноплечего рычага 11 (на фиг. 1 показано штрихпунктирными линиями) его короткое складное плечо 14 соскакивает с опорных штифтов 18 и груз 7 под действием 8 перемещается по направляющему стержню 5 до удара в упорный фланец 6 направляющего стержня 5, сила которого передается захвату, а через его ленточную коническую пружину 22 извлекаемому гвоздю 32, обеспечивая тем самым его удаление из изделия 33. При
повторных поворотах неравноплечего рыча5
га 11 цикл работы механизма повторяется до полного удаления гвоздя 32 из изделия 33. Удаление гвоздя 32 из захвата после его извлечения из изделия 33 производится обратным поворотом втулки- держателя 29 с раскручиванием витков ленточной конической пружины 22 при постоянном поджатии ее витков один к другому и к конической втулке 23, как и при
врезании ее в изделие 33, обеспечиваемом пружиной 26.
Ударный механизм обеспечивает работу и в режиме забивания гвоздей. В этом случае рабочий инструмент крепится через переходник к направляющему стержню 5 со стороны рукоятки 2 (не показано).
Формула изобретения
складным подпружиненным плечом, и рабочий инструмент с узлом захвата, отличающийся тем, что, с целью улучшения условий эксплуатации и расширения эксплуатационных возможностей, направляющий стержень установлен в осевых соосных отверстиях с возможностью осевого перемещения и с двусторонним выходом его концов за торцы корпуса для крепления рабочего инструмента, а рукоятка и неравно1. Ударный механизм, содержащий кор-Ю плечий рычаг расположены вдоль оси мехапус с жестко закрепленной рукояткой и снизма по одну сторону от торца корпуса,
осевыми соосными отверстиями в обоих2. Механизм по п. 1, отличающийся
его торцах, установленные в нем подпру-тем, что, с целью повышения эффектив. жиненный к корпусу с возможностью пе-ности работы за счет надежного захвата
ремещения в осевом направлении груз с pa- извлекаемого гвоздя, узел захвата выдиальными отверстиями и продольным пазом, направляющий стержень с продольными пазами и с упорным фланцем для контактирования с грузом, установленный в осевых соосных отверстиях, узел взвода
полней в виде конического хвостовика, поворотной оси втулки и установленной между ними с возможностью относительного поворота концов и осевого поджатая витков ленточной конической пружины
и сброса груза в виде шарнирно зак-20 с режущими зубьями на обращаемом к из- репленного на корпусе и подпружиненно-влекаемому гвоздю торце ленты, а меха- го к корпусу неравноплечего рычага с корот-низм снабжен цилиндрическом пружиной ким складным подпружиненным к пос-сжатия, установленной между коническими леднему плечом, расположенным в про-хвостовиком и торцом поворотной втулки дольном пазу груза, и штифтов, уста-jc АЛЯ постоянного осевого поджагия витков новленных в радиальных отверстиях грузаконической пружины при относи кмьном по- для периодического контактирования совороте ее концов.
складным подпружиненным плечом, и рабочий инструмент с узлом захвата, отличающийся тем, что, с целью улучшения условий эксплуатации и расширения эксплуатационных возможностей, направляющий стержень установлен в осевых соосных отверстиях с возможностью осевого перемещения и с двусторонним выходом его концов за торцы корпуса для крепления рабочего инструмента, а рукоятка и неравнополней в виде конического хвостовика, поворотной оси втулки и установленной между ними с возможностью относительного поворота концов и осевого поджатая витков ленточной конической пружины
с режущими зубьями на обращаемом к из- влекаемому гвоздю торце ленты, а меха- низм снабжен цилиндрическом пружиной сжатия, установленной между коническими хвостовиком и торцом поворотной втулки АЛЯ постоянного осевого поджагия витков конической пружины при относи кмьном по- вороте ее концов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ударный механизм | 1981 |
|
SU982895A1 |
| Устройство для удаления гвоздей | 1985 |
|
SU1306703A1 |
| Ручной инструмент ударного действия | 1982 |
|
SU1024262A1 |
| Ударный механизм | 1984 |
|
SU1222531A1 |
| Привод метательной игрушки | 1984 |
|
SU1233885A1 |
| Ударный инструмент | 1983 |
|
SU1105284A2 |
| Устройство для сверления отверстий | 1980 |
|
SU939218A1 |
| Рычажные ножницы | 1976 |
|
SU656756A2 |
| Рычажные ножницы | 1977 |
|
SU695771A1 |
| Захватное устройство | 1986 |
|
SU1351775A2 |
Изобретение относится к ручным ударным устройствам. Цель изобретения - улучшение условий эксплуатации и расширение эксплуатационных возможностей, а также повышение эффективности работы за счет надежности захвата извлекаемого гвоздя. Направляющий стержень 5 установлен в осевых соосных отверстиях корпуса 1 с возможностью осевого перемещения и с двусторонним выходом его концов за торцы корпуса для крепления рабочего инструмента, а рукоятка 2 и неравноплечий рычаг расположены вдоль оси механизма по одну сторону от торца корпуса. Узел захвата выполнен в виде конического хвостовика 25, поворотный вокруг оси втулки 23 и установленной между ними с возможностью относительного поворота концов и осевого поджатия витков ленточной конической пружины 22 с режущими зубьями на обращаемом к извлекаемому гвоздю 32 торце ленты. Механизм снабжен цилиндрической пружиной 26 сжатия, установленной между коническим хвостовиком 25 и торцом поворотной втулки 27 для постоянного осевого поджатия витков ленточной конической пружины 22 при относительном повороте ее концов. 1 з.п.ф-лы, 3 ил.
5J
Фие.1
Фиг. 2
Фиг.З
И 723
| Ударный механизм | 1981 |
|
SU982895A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
