ФАЗОВЫЙ СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Заявлено 4 августа 196Ь г. за № 740853/26 в Комитет по делам изобретений и открытий при Совете Министров СССР
Опубликовано в «Бюллетене изобретений № 12 за 1%2 г.
Известные фазовые способы программного управления с записью программы на магнитной ленте в виде последовательностей импульсов рабочего и опорного каналов, сдвинутых друг относительно друга по фазе, имеют низкую точность управления и плохую помехозащищенность, что ограничивает их применение в производстве.
Предлагаемый фазовый способ программного управления отличается от известных тем, что задание программы и работу датчиков обратной связи производят на двух различных несинхронизированных частотах. Вторая из этих частот, на несколько порядков (1-3) выще первой, а каждый период сигнала, снимаемого с ленты, представляет собой п равноотстоящих друг от друга импульсов, где п целое число, превыщающее 2. Это отличие позволило значительно повысить точность и помехозащищенность программного управления,
Для осуществления способа предлагается устройство, в котором для увеличения надежности работы аппа затурь магнитной записи, предназначенной для программного управления, магнитная головка опорного канала соединена с коммутатором, через который п-фазный опорный генератор подключен к одному из входов фазового дискриминатора. Магнитная головка рабочего канала в свою очередь соединена с другим коммутатором, через .который фазовый датчик обратной связи подключен ко второму входу дискриминатора. В качестве второго варианта реализации фазового способа программного управления п р«длагается устройство, в котором один из входов дискриминатора непосредственно соединен с датчиком обратной связи, а магнитные головки опорного и рабочего каналов соединены с коммутатором. Через коммутатор л-фазный опорный генератор подключен ко второму входу дискриминатооа.
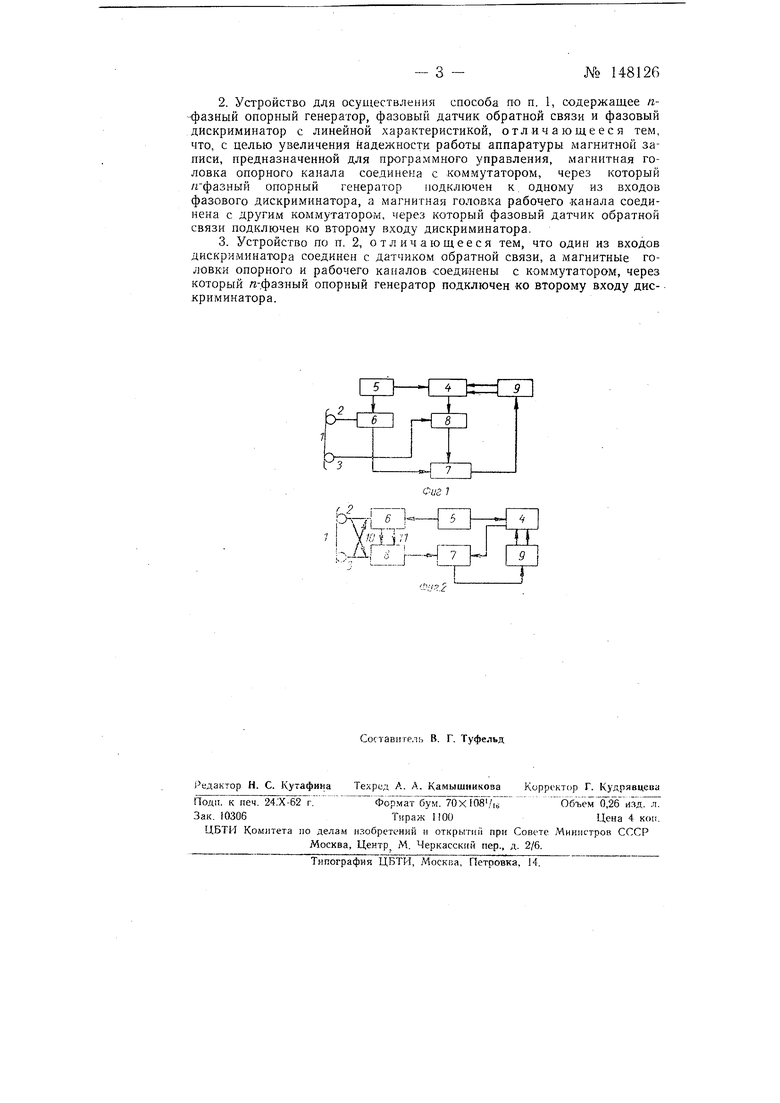
N- 148126На фит. I и . 2 изображены две принципиальные блок-схемы устройств, реализующих предлагаемый фазовый способ программного
управления.
Программа задается на магнитной ленте / в виде последовательностей импульсов рабочего и опорного каналов, сдвинутых друг относительно друга по фазе. Сигналы с ленты / снимаются двумя магнитными головками 2 и 3. Датчики 4 обратной связи запитывают от стабил; 1юго rt-фазного опорного генератора 5, частота которого на несколько порядков (1-3) выше частоты сигнала, снимаемого с магнитной ленты /. Для увеличения надежности работы аппаратуры магнитной записи магнитная головка 2 опорного канала соединена с коммутаTopoNr (5/через который п-фазный генератор 5 подключен к одному из входов фазового дискриминатора 7. Магнитная головка 3 рабочего канала соединена с другим коммутатором 8, через который фазовые датчики 4 обратной связи подключены ко второму входу фазового дискриминатора 7. Датчики 4 обратной связи механически: связаны с исполнительным органом Я на который с фазового дискриминатора 7 поступает сигнал рассогласования в случае несоответствия сигналов, подаваемых па входы дискриминатора. Исполнительный орган будет работать до тех пор, пока сигнал рассогласования, снимаемый с фазового дискриминатора, не станет равным нулю, что будет соответствовать отработке заданной магнитной лентой / программы.
На фиг. 2 приведена принципиальная блок-схема, состоящая из тех же элементов, что и на фиг. 1, однако в ней один из входов фазового дискриминатора 7 непосредственно соединен с датчиком 4 обратной связи. Магнитные головки 2 и 3 опорного и рабочего каналов в этом случае соединены с коммутаторами (5 и 8, через которые п-фазный опорный генератор 5 подключен по второму входу фазового дискриминатора 7. Во время работы схемы выходы п-фазного генератора сигнала поступают на коммутатор 6, имеющий два выхода 10 и //, по которым поступают сигналы с генератора двух фаз, причем фаза сигнала с выхода и сдвинута относительно фазы сигнала с выхода 10 на - радиан (где л- целое число, нревышающее 2). Сигналы с. обоих выходов 10 и 11 поступают на коммутатор 8, который работает таким образом, что после прихода каждого импульса с опорной дорожки магнитной ленты.У на вход дискриминатора 7 подаются импульсы с выхода НО коммутатора 6, а после поступления каждого импульса с рабочей дорожки магнитной ленты / на вход дискриминатора подключается выход П.
Предлагаемый фазовый способ программного управления и -стpoia-.тва для его реализации могут найти широкое применение в различных производственных процессах, например для программного управления металлорежущими станками и другими процессами.
.Предмет изобретения
}. Фазовый способ программного управления с записью программы на мГГцктной ленте в виде последовательностей импульсов рабочего к опорного каналов, сдвинутых друг относительно друга по фазе, отлнч а ю щ; н и с я тем, что, с целью повышения точности и помехозаш.ящен;:аст - - программного управления, задание нрограммы и работу датчикоа обратной связи производят на двух различных несинхронизированиых частотах, из которых вторая на несколько порядков (1-3) выше срЕ50й, а каждый период сигнала, снимаемого с ленты, представляет собой /т равноотстоящих друг от друга импульсов, где /г-целое число, лревЫпаюпке 2.
2.Устройство для осуществления способа по п. 1, содержащее п-фазный опорный генератор, фазовый датчик обратной связи и фазовый дискриминатор с линейной характеристикой, отличающееся тем, что, с целью увеличения надежности работы аппаратуры магнитной записи, предназначенной для программного управления, магнитная головка опорного канала соединена с коммутатором, через который /гфазный опорный генератор подключен к. одному из входов фазового дискриминатора, а магнитная головка рабочего канала соединена с другим коммутатором, через который фазовый датчик обратной связи подключен ко второму входу дискриминатора.
3.Устройство по п. 2, отличающееся тем, что один из входов дискриминатора соединен с датчиком обратной связи, а магнитные головки опорного и рабочего каналов соединены с коммутатором, через который п-.фазный опорный генератор подключен ко второму входу дискриминатора.
- 3 -№ 148126
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазоимпульсное устройство программного управления | 1973 |
|
SU485416A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU750438A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| Устройство для управления скоростью перемещения носителя магнитной записи | 1977 |
|
SU699563A1 |
| Импульсно-фазовый преобразователь | 1974 |
|
SU501480A1 |
| Способ автоматического регулирования скорости перемещения магнитной ленты в подводных геофизических станциях и устройство для его осуществления | 1981 |
|
SU1056263A1 |
| Устройство для фазового числового программного управления станком | 1972 |
|
SU485415A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| Импульсно-фазовый преобразователь | 1973 |
|
SU448594A1 |
| ТЕХНЙЧССК-ДЯ '" БИБЛИОТЕКАВ. И. Симоненков | 1969 |
|
SU247373A1 |
ГЗ
2
i,
ЬЖТг-Ч
K/f J/7
