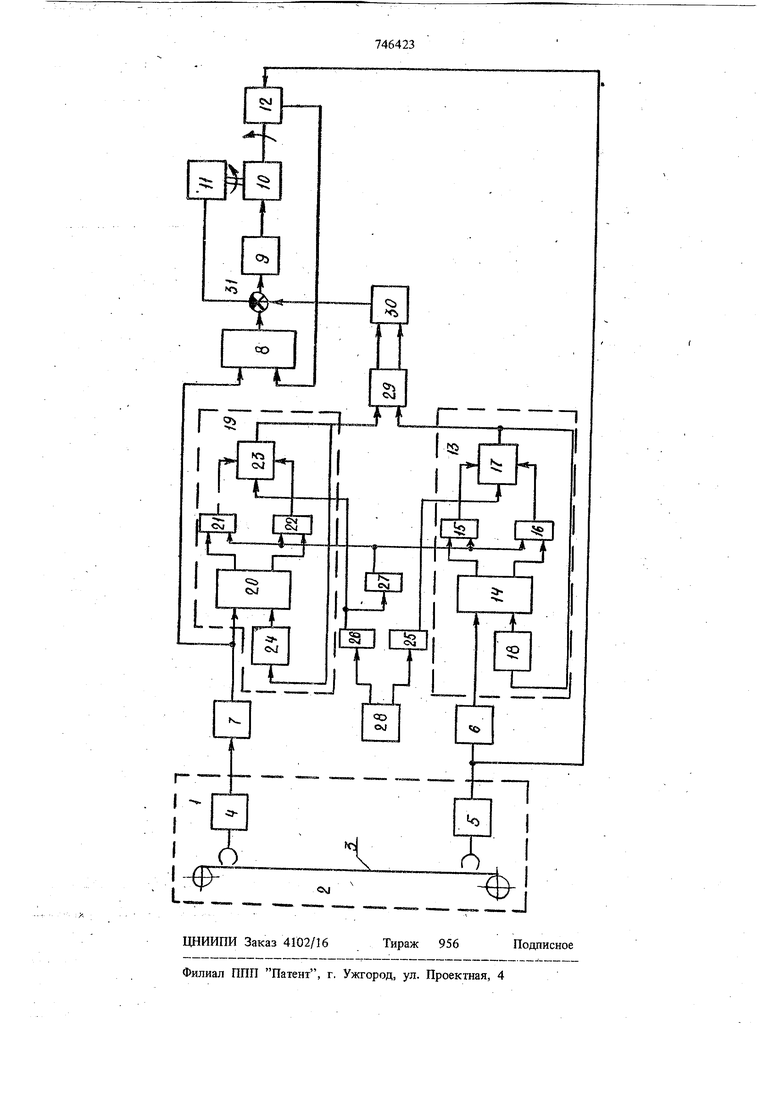
(54) ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА С КОМБИНИРОВАННЫМ Изобретение относится к системам программного управления и предназначено для точного . управления положением рабочего органа за . счет выделения и введения в закон регулирова ния сигнала пропорционального скорости задаю щего воздействия (скорости изменения фазы) в фазовых системах числового программного управления с магнитной лентой. Известно устройство, реализующее способ получения скоростного сигнала с магнитного носителя, содержащее последовательно соединенные усилитель и фазовый дискриминатор, другой вход которого через линию задержки подключен к выходу усилителя, в котором скоростной сигнал получают в виде напряжения пропорционального разности фаз между сигналом, считанным непосредственно с ленты, и сигналом, задержанным по времени 1 . Однако это устройство не может быть реализовано для современных промышленных систем программного управления, так как сдвиг между сигналом, считанном с ленты и задержан ным должен быть не менее полупериода изменения данныхсигналов. При опорных частоУПРАВЛЕНИЕМтах принятых в промышленных системах программного управления, этот сдвиг доджей составлять 4-5 МКС. Наиболее близким к изобретению техническим решением является фазовая следящая система с комбинированным управлением 2, содержащая последовательно соединенные фазовый дискриминатор, усилитель-сумматор и исполнительный двигатель, выход, которого связан с блоком скоростной обратной связи и датчиком положения, выходы которых соединены соответственно с первым входом усилителя-сумматора и первым входом первого фазового дискриминатора, а также задатчик, первый выход которого подключен к входу датчика положения и преобразователь частота-напряжение, выход которого соединен со вторым входом усилителя сумматора 2. Недостатком известной системы является малая динамическая точность. В данной системе скоростной сигнал получается в виде разности двух напряжений пропорциональных частотам сигналов управляющего и опорного каналов, полученных путем 37 преобразования частот этих сигналов в две серии нормирова1гаых по амплитуде и длительности треугольных импульсов, с последующим выделением из каждой серии импульсов постоянной составляющей. Поскольку скоростной сигнал выделяется как разность двух приблизительно равных напряжений, точность выделения этого сигнала невелика. Цель изобретения - повышение точности системы путем повышения точности выделения сигнала, пропорционального скорости задающего воздействия в фазовой системе программного управления. Это достигается тем, что в систему введены вычитатель частот, первый и второй блоки выделения девиации частоты, первый и второй формирователи импульсов, генератор импульсов три триггера, причем первый и второй входы преобразователя частота - напряжение подклю чены соответственно к первому и второму вьхходам вычитателя частот, первый и второй входы которого подключень соответственно к выходам первого и второго блоков выделения девиаш1И частоты, а первый и второй выходы задатчика соответственно через первый и второй формирователи импульсов подключены к первы входам первого и второго выделителей девиации частоты, выход второго формирователя импульсов соединен со вторым входом первого фазового дискриминатора, а первый и второй выходы генератора импульсов соединены соответственно с входами первого и второго тригге ров, выходы которых подключены к вторым входам первого и второго блоков выделения девиации частоты, третьи входы которых соединены с выходом третьего триггера, а его вход с выходом второго триггера, причем каждый блок выделения девиации частоты содержит второй фазовый дискриминатор, первый вход которого подключен к первому входу блока, а первый и второй выходы соединены соответственно с первыми входами первого и второго элементов И, а их выходы - с первым и вторым входами сумматора, выход которого через делитель частоты соединен с вторым входом второго фазового дискриминатора и выходом блока, а третий вход сумматора и вторые входы элементов И подключены соответственно ко второму и третьему входам блока. На чертеже приведена функциональная схема фазовой системы программного управления. Фазовая система состоит из-задатчика 1, выполненного в виде механизма 2 ввода программы, магнитного носителя, например, ленты, с программой 3, считывающих головок рабочего канрла 4 и опорного канала 5, первого формирователя импульсов опорного канала 6, второго формирователя импульсов рабочего канала 7 первого фазового дискриминатора 8, усилителя3сумматора 9, исполнительного двигателя 10, блока 1 скоростной обратной связи, датчика 12 положения, первого блока 13 выделения девиации частоты опорного канала, состоящего из второго фазового дискримшгатора 14, первого Элемента 15 И, второго элемента 16 И, сумматора 17 и делителя 18 частоты, второго блока 19 выделения девиации частоты рабочего канала, состоящего из второго дискриминатора 20, первого элемента 21 И, второго элемента 22 И, сумматора 23 и делителя 24 частоты, первого триггера 25, второго триггера 26, третьего триггера 27, генератора 28 импульсов, вычитателя 29 частот, преобразователя 30 „частота-напряжение, входной цепи 31 усилителя-сумматора. Формирователь 6 импульсов, первый блок выделения девиации частоты 13 образуют опорный канал, а формирователь 7 и второй блок 19 выделения девиации частоты образуют рабочий канал системы. Коэффициенты деления делителей 18 и 24 частоты одинаковы и численно равны цене периода фазы сигнала, поступающего с фазовращательного задатчика I. Фазовая следящая система работает следующим образом. Информация о задающем воздействии на систему записывается на магнитной ленте 3 в вида изменения начальной фазы напря Гения рабочей дорожки: Up и Sin 211 Vfp(t)+ f(t)I (1) относительно фазы напряжения дорожки опорного канала и,, и Sin 2Ti fn + f о п (0),(2) UQ - напряжения рабочего и опорного каналов соответственно; -опорная частота; -девиация частоты, пропорциональная скорости задающего воздействия;. . fp(t) - девиация частоты от нестабильности задающего генератора записывающей аппаратуры и нестабильности скорости лентопротяжных механизмов записывающей и воспроизводящей аппаратуры. Рассмотрим случай отсутствия девиации частоты от помех в сигналах рабочего и опорного каналов fр (t) 0. В исходном состоянии задающее воздействие на систему отсутствует, т. е. tp(t)0, частоты сигналов рабочего и опорного каналов фазовращательного задатчика 1 равны, фазы напряжений, поступающих на первый фазовый дискриминатор 8 через формирователь 7 с фазовращательного задатчика 1 и датчика 12 положения, индукторная обмотка которого питается напря57жением опорного сигнала фазовращагслыюго задагчика 1, находятся в cornacoeaffflOM состоянии, выходной сигнал фазового дискриминатора 8 равен нулю, и система находится в йокое. Если системе задано движение, то fp(t) О, частота сигнала рабочего канала станет неравной частоте сигнала опорного канала, спустя некото рое время первый фазовый дискриминатор 8 выявит разность фаз между сигналом рабочего канала фазовращагощего задатчика 1 и выходным сигналом датчика 12 положения и выделит напряжение, пропорциональное этой разности фаз. Напряжение с выхода первого фазового дискриминатора 8 складывается на входных цепях 31 усилителя-сумматора 9 с выходным напряжением блока 11 скоростной обратной связи и .выходным напряжением Преобразователя частота-напряжение 30, усиливается усилителем 9 и подается на якорь исполнительного двигателя 10. Исполнительный двигатель 10 вращается так, что частота напряжения на выходе фазовращающего датчика 12 положения станет равной частоте сигнала рабочего канала. Известно, что мгновенная скорость задающего воздействия фазовращающего задатчика пропорциональна девиации частоты fp(t) в выра жении (1), а среднее значение ее пропорционально отношению приращения фазы напряжения Up,вызванное девиацией fp(t), ко времени в течение которого произошло это приращение фазы. Из уравнения (1) видно, чго напряжение рабочего канала наряду с полезной девиацией fр (t) содержит девиацию частоты fп () 13ванную помехами. Напряжение опорного канала фазовращагёльного задатчика (2) так же-имеет девиацию частоты от помех. Так как условия записи и воспроизведения рабочего и опорного сигналов на магнитной ленте фазовращающего задатчика 1 одинаковы, то девиация частоты,обусловленная помехами, в выражениях (1) и (2) одинакова, то для получения алгоритма CKOpoiCTHoro сигнала следует выделить девиацию частоты в напряжении рабочего канала; вы делить девиацию частоты в напряжении опорного канала; вычесть из девиации частоты напряжения рабочего канала девиацию частоты опорного канала; полученную разность девиаций частот преобразовать в постоянное напряжение. Девиация частоты сигнала рабочего канала фазовращающего задатчика выделяется блоком 19, а опорного - блоком 13, причем, выделение девиации частот сигналов как рабочего, так и опорного каналов осуществляется с помощью общих для обоих каналов элементов 25, 26 , 27 и 28. Работа обоих блоков одинаков Перед включением схемы в работу делителя 18 и 24 устанавливаются, в одинаковое (нулево состояние известным способом. Из синусоидального напряжения канала рабочего сигнала на выходе усКпителя 4 формирователь 7 формирует прямоугольные импульсы, длительность которых равна половине периода напряжения на вь1ходе усилителя 4. Эти импульсы подаются на первый вход фазового дискриминатора 20. На второй вход этого фазового дискриминатора подаются прямоугольные импульс) с выхода делителя 24, причем длительность этих импульсов равна половине периода следования их. По каналу опорного сигнала из синусоидального импульса с выхода усилителя 5 формирователь 6 формирует прямоугольные импульсы, длительность которых равна половине периода напряжения на выходе усилителя 5. Эти импульсы поступают на п ервый вход фазового дискриминатора 14. На второй вход этого фазового ди- скриминатора подаются импульсы с ВЙХОДЁ дёйителя 18. В исходном состоянии частота и фаза этих импульсов равны частоте и фазе импульсов на выходе делителя 24. Предположим, что при отсутствии задающего воздействия fp(t)0 и помех fr,(t )0 в уравнениях (1) и (2) частоты следования импульсов на выходах делителей 18 и 24 равны частоте сигнала опорного Канала fg. Тогда возможны такие случаи. Первый случай, когда фазы импульсов, поступающих на оба входа фазовых дискриминаторов 14 и 20 находится в согласованном состоянии. В этом случае на выходах фазовых дискриминаторов 14 и 20 сигналы отсутствуют, на первые входы элемекгов 15, 16 И по каналу опорного сигнала и 21, 22 И по каналу рабочего сигнала подаются запирающие потенциалы, поэтому импульсы высокой частоты, подаваемые на вторые входы этих элементов с выхода триггера 27 не пройдут на входы сумматоров 17 по каналу опорного сигнала и сумматоров 23 по каналу рабочего сигйала и на выход будут проходить импульсы только с третьих входов. На третьи входы сумматоров 17 и 23 поступают импульсы од 1наковой частоты и сдвинутые на 90° относительно друг друга. Следовательно, при отсутствии импульсов на ocTainbHbix входахэтих схем, ч стота йМт1уйьсов на выходах сумматоров 17 и 23 будет одинакова. Импульсы с выхода сумматора 17 поступают на вход дедителя 18 и на первый вход вычитателя частот 29 , импульсы с выхода схемь 23 - на вход делителя 24 и второй вход вычитателя частот 29. Так как частоты импульсов на обоих входах вычитателя частот 29 одинаковы, то на выходах этого блока импульсы отсутствуют, на входы преобразователя частота-напряжение 30 шчего не поступает, -7. , и на выходе его нулевой сигнал. С другой сто роны, количество импульсов, поступающих на входы делителей 18 и 24, осталось одинаковым и Неизменным, следовательно, фазы импульсов на выходах этих делителей тоже остались неизменными. Второй случай, когда фазы импульсов на входах фазовых дискрргминаторов 14 и 20 не согласованы. При отсутствии задающего воздействия и помех в сигналах рабочего и опорного каналов разность фаз импульсов на первом и втором входах фазовых дискриминаторов 14 и 20 будет одинакова. Допустим, полярность разности фаз импульсов на входах фазовых дискриминаторов 14 и 20такова, что импульсы рассогласования появ ляются на выходах, соединенных со входами элементов 15 и 21 И. На вторые входы этих элементов подаются импульсы высокой частоты с выхода триггера 27. В результате, на выходах элементов 15 и 21появятся пачки импульсов. Количество импульсов в обеих пачках одинаково и пропорционально разности фаз импульсов на входе каждого из фазовых дискриминаторов 14 и 20. Пачка импульсов с выхода элемента 15 И пода ется на первый вход сумматора 17, а с выхода элемента 21 И - на первый вход сумматора 23 Таким образом, на время прохождения указанных пачек импульсов через сумматоры 17 и 23частоты следования импульсов на их выхода увелишваются. С некоторым сдвигом во време мени увеличиваются частоты импульсов на выходах делителей 18 и 24. Следовательно, сдвиги фаз импульсов на вторых входах фазовых дискриминаторов 14 и 20 будут уменьщаться и ко времени прохождения пачки импульсов с выходов элементов 15,21 И через делители 18 и 24фазы импульсов на входах фазовых дискриминаторов 14 и 20 достигнут согласованного состояния. Поскольку количество импульсов в пачках, поступивщих на первые входы сумматоров 17 и 23, одинаково, и пачки эти на обе схемы приходит одновременно, то, частоты следования импульсов на выходах сумматоров 17 и 23 одинаковы в любой юмeнт времени, следовательно, частоты импульсов, поступающих на входы вычитателя частот 29 равны, на его выходах импульсы отсутствуют, на входы преобразователя частота-напряжение 30 ничего не поступает и скоростной сигнал отсутствует. Если начальная разность фаз импульсов на входах фазовых дискриминаторов 14 и 20 имеет противоположный знак, то импульсы рассогласования появляются на вторых выходах указанных фазовых дискриминаторов. Эти импульсы поступают на первые входы элементов 16 и 22 И соответственно. Пачки 3 игипульсов с выхода элемента 16 И поступают на второй вход сумматора 17, а с выхода эле мента 22 И - на второй вход сумматора 23. В результате, частоты импульсов на выходах сумматоров 17 и 23 уменьшаются на одну и ту же величину. Это приводит к изменению фазы импульсов на выходах делителей 18 и 24 так, чтобы начальные разности фазы импульсов на входах фазовых дискриминаторов 14 . и 20 стали равными нулю. Так как частоты импульсов, поступающих на оба входа вычитателя частот 29 одинаковы, то на его выходе импульсов нет, на вход преобразователя 30 ничего не поступает и напряжение на его выходе, пpoпopщ oнaльнoe; скоростному сигналу, равно кулю.. Рассмотрим случай появления девиации частоты от помех в сигналах рабочего и опорного каналов при отсутствии задающего воздействия т. е. fpi (t) / О, а fp (t) 0. В этом случае от девиации частоты fpCt) начнет нарастать разность фаз импульсов на входах фазовых дискриминаторов 14 и 20. Так как девиа1щя частоты от помехи fp)(t) в обоих каналах одинакова, то и разность фаз импульсов на обоих входах фазовых дискриминаторов 14 и 20 будет нарастать синхронно и синфазно. Возникновение одинаковой разности фаз импульсов на входах фазовых дискриминаторов 14 и 20, как и при наличии начального сдвига фаз импульсов на входах фазовых дискриминаторов 14 и 20, вызовет изменение частоты импульсов на выходах сумматоров 17 и 23 на одну и ту же величину Д1 (t), которая с некоторым сдвигом во времени будет следовать за девацией fp|(t),-3a счет чего будут компенсироваться сдвиги фаз импульсов на входах фазовых дискриминаторов 14 и 20. Так как частоты импульсов на обоих входах вычитателя 29 частот равны, то и в этом случае нанряженяе на выходе преобразователя 30 равно нулю. Если не выполняется предположенное выше равенство частоты fg в уравнениях (1) и (2) частотам fj , f2 на выходах делителей 18 и 24 в исходном состоянии, причем, в исходном состоянии fj f2, то наличие -разности (fo- -fl) (О - f2) равносильно наличию девиации частоты (fQ-fi) в сигналах рабочего и опорного каналов одновременно. Этот случай рассмотрен выше при условиях fn (t)0, fp(t)0. Работа устройства при наличии в сигнале рабочего канала девиации частоты от управляющего воздействия и помех, а в сигнале опорного канала - девиации частоты от помех прюисходит следующим образом. В исходном состоянии fo fj fz- в этом случае изменение частоты следования импульсов на выходе сумматора 23, вызванное нали чием в сигнале рабочего канала девиации частоты fp(t)+fn(t) будет равно величине fp(t) + fn(t), а изменение частоты на выходе сумматЬра 17, вызванное девиацией частоты сигнала опорного канала fp (t) будет равно величине fр (t). Следовательно,, на первый вход вычитателя частот 29 поступят импульсы с частотой т + fp (t) + fn(t), а на второй - с частотой fT fn (t), т частота импульсов на выходе триггеров 25 и 26. На одном из выходов вычитателя частот 29 в зависимости от знака разности f i -f2 появят ся импульсы с частотой fl-f2 fx + fn (t) + fn (t)-fT-fn(t)-fp( Эти импульсы подаются на соответствующий вход преобразователя 30 частота-напряжение 30 и на выходе этого преобразователя появляетс напряжение пропорциональное f„ (t). Если учесть, что управляющее воздействие на фазовую слетщую систему пропорционально изменению начальной фазы ф р сигнала рабочего канала (1) относительно сигнала опорного канала (2), а указанная фаза пропорциональна Мр KJ fp(t) dt. где к - коэффициент пропорциональности то величина fp(t) пропорциональна скорости задающего воздействия, следовательно, напряжение на выходе преобразователя 30 частота-напряжение пропорционально скорости задающего воздействия. Это напряжение подается на входные цепи 31 усилителя-сумматора 9. Триггеры 25, 26 введены в схему для создания сдвига во времени для импульсов, поступающих от генератора 28 на входы сумматоров 17 и 23, на 90° для обеспечения надежной работ вычитателя 29 частот. Использование предлагаемой фазовой системы с комбинированным управлением в отраслях народного хозяйства, насыщенных техникой с программным управлением, позволит повысить точностные и качественные характеристики стано ного-парка и тем самым ликвидировать доводоч ную технологию для особоточнЫзс деталей. Эконо мия от применения предлагаемой системьг только на станках с ПУ предприятий отрасли составит около 200 тыс. руб. Формула изобретения 1. Фазовая следящая система с комбинированньтм управлением, содержащая последователь но соединенные лервый фазовый дискриминатор, усилите ль-сумматор и исполнительный двигатель, выход которого связан с блоком скоростной обратной связи и датчиком положения, выходы которых соедииены соответственно с первым входом усилителя-сумматора и первым входом первого фазового дискриминатора, а также задатчик, первый выход которого подключен к входу датчика положения и преобразователь частота-напряжение, выход которого соединен со вторым входом усилителя-сумматора, отличающаяся тем, что, с целью повыщения точности системы, в нее введены вычитатель частот, первый и второй блоки выделения девиации частоты, первый и второй формирователи импульсов, генератор импульсов, три триггера, причем первый и второй входы преобразователя частота-напряжение подключены соответственно к первому и второму выходам вычитателя частот первый и второй входы которого подключены соответственно к выходам первого и второго блоков выделения девиации частоты, а первый и второй выходы задатчика соответственно через первый и второй формирователи импульсов подключены к первым входам первого и второго выделителей девиаиии частоты, выход второго ; формирователя ил лульсов соединен со вторым входом первого фазового дискриминатора, а первый и второй выхода генератора импульсов соединены соответственно с входами первого и второго триггеров, выходы которых подключены к вторым входам первого и второго блоков выделения девиащЙ частоты, третьи входы которых соединены с выходом третьего триггера, а его вход с выходом второго триггера. 2. Устройство по П.1, о т л и ч. а ,ю щ е е с я тем, что блок выделения девиации частоты содержит второй фазовый дискриминатор, первый вход которого подключен к первому входу блока, а первый и второй выходы соединены соответственно с первыми входами первого и второго элементов И, а их выходы с первым и вторым входами сумматора, выход которого через делитель частоты соединен со вторым входом второго фазового дискриминатора и выходом блока, причем. третий вход сумматора и вторые входы элементов И подключены соответственно ко второму и третьему входам блока. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 147885, кл. G 05 В 19/16, 04.07.61. 2.Авторское свидетельство СССР № 318016, кл. G 05 В 11/06, 23.04.70 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Анализатор спектра | 1982 |
|
SU1182431A1 |
| ФАЗОЧУВСТВИТЕЛЬНЫЙ ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1991 |
|
RU2041099C1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Фазоимпульсное устройство программного управления | 1973 |
|
SU485416A1 |
| Синтезатор частоты с частотной модуляцией | 1986 |
|
SU1345343A1 |
| Цифровой частотный дискриминатор | 1982 |
|
SU1131036A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Умножитель частоты следования импульсов | 1989 |
|
SU1728964A2 |
| Способ цифрового управления многофазным инвертором | 1989 |
|
SU1683154A1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |