1
Изобретение относится к измерительной технике и может быть использовано для измерения вязкости и плотности контролируемой жидкости.
Целью изобретения является расширение области применения устройства для исследования жидкостей, обладающих магнитными свойствами.
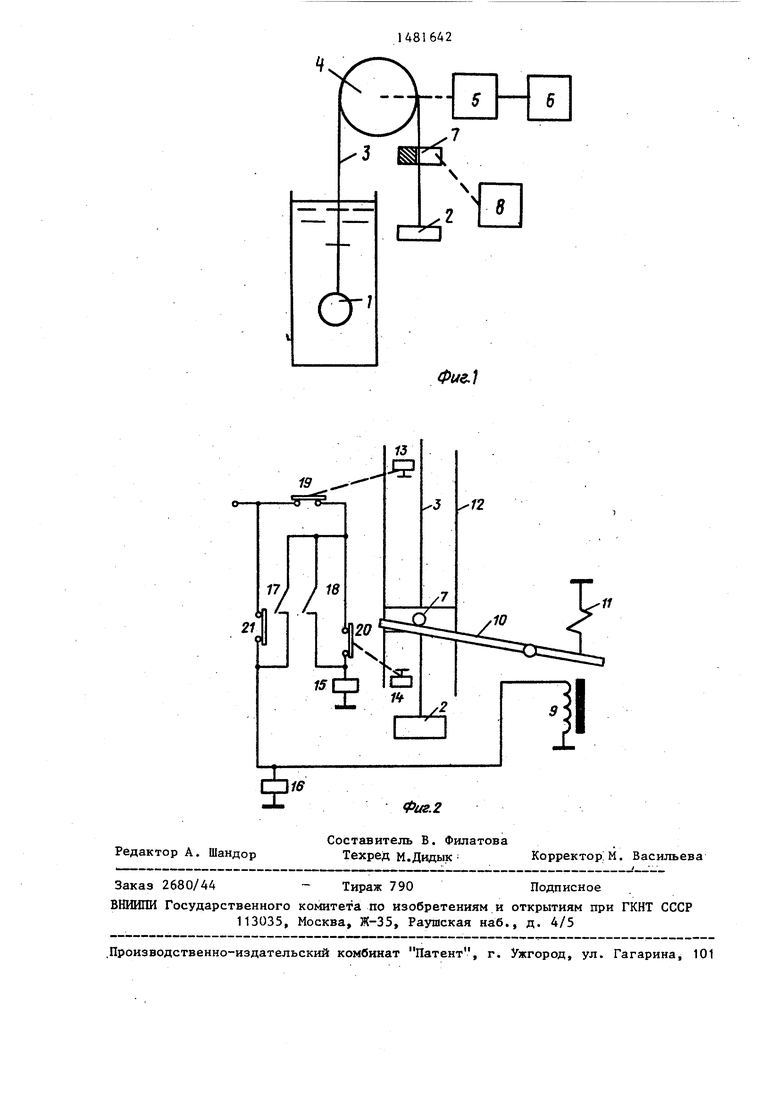
На фиг. 1 представлена структурная схема измерителя вязкости и плотности жидкости; на фиг. 2 - измеритель узла управления дополнительным грузом.
В составе измерителя входят зонд
1,воспринимающий воздействие сил контролируемой жидкости, противовес
2,снижающий скорость погружения зонда 1, трос 3, скрепляющий гибкой связью зонд 1 ,и противовес 2, блок 4, изменяющий направление движения троса 3, отметчик 5 угла поворота, контролирующий угол поворота блока 4, а следовательно, величину смещения троса 3 и зонда 1 в процессе его движения, вычислительный блок 6, запоминающий информацию-с выхода отметчика 5 угла поворота и на ее основе рассчитывающий вязкость и плотность жидкости, дополнительный груз 7,при снятии которого зонд 1 движется вниз, а при введении - вверх, узел 8 управления дополнительным грузом, в нижней точке траектории движения зонда 1 нагружающий противовес 2 дополнительным грузом 7, а в верхней точке снимающий дополнительный груз 7 с противовеса 2.
Узел 8 управления дополнительным грузом- (фиг. 2) содержит силовое реле 9, определяющее положение вращаю3
00
О5 4. Ю
щегося на оси подпружиненного рычага 10, обеспечивающего подъем дополнительного груза 7; пружину 11, воз-- вращающую рычаг 10 в исходное положение при обесточивании силового рел 9 направляющие полозья 12, определяющие траекторию движения дополнительного груза 7, первый концевой выключатель 13, срабатывающий после подъема дополнительного груза 7 до верхней точки траектории его движения; второй концевой выключатель 14 срабатывающий при опускании дополнительного груза 7 в нижнюю точку траектории его движения,управляющее реле 15, обеспечивающее включение и выключение силового реле 9; реле 16 времени, задерживающее выключение силового реле 9 на время погружения зонда 1.
На фиг. 2 дополнительно обозна- чены: первый 17 и второй 18 контакты управляющего реле 15, контакт 19 первого концевого выключателя 13, контакт 20 второго концевого выключателя 14 и первый контакт 21 реле 16 времени.
Одна из фаз измерения совпадает с измерением вязкости жидкости спо- собом Стокса. Зонд 1 шаровой формы под действием собственного веса погружается в контролируемую жидкость С целью повышения метрологических характеристик измерения, скорость пгружения зонда 1 снижается введение противовеса 2, скрепленного с зондом 1 тросом 3, который перекинут чрез блок 4. В процессе погружения зонда J измеряется скорость и ускорение его движения. Как только зонд 1 достигает нижней траектории своего движения, начинается вторая фаза измерения. На противовес 2 нагружают дополнительный груз 7, в результате чего суммарный вес противовеса 2 и дополнительного груза 7 становится большим веса зонда I. Начинается всплытие
1, в процессе которого также
меряется скорость и ускорение движения зонда 1. Результатов замера скоростей и ускорений всплытия и погруЧ жения зонда 3 достаточно для расчета вязкости и плотности жидкости. Как только зонд 1 достигнет верхней точки траектории своего движения, снятием дополнительного груза 7 с противовеса 2 можно начать новый цикл
20
816424
измерения вязкости и плотности жидкости.
Элементы измерителя вязкости и плотности жидкости (фиг, 1) взаимодействуют между собою следующим образом. На концах троса 3, перекинутого через блок 4, закреплены зонд 1 и противовес 2 соответственно. Ось
(О блока 4 кинематически связана с входной осью отметчика 5 угла поворота . Электрический выход которого подключен к входу вычислительного блока 6. Узел 8 управления дополни15 тельным грузом 6 кинематически связан с дополнительным грузом 7 и может или размещать этот груз на противовесе 2, или снимать его с противовеса 2.
0
5
0
5
0
5
0
5
Элементы узла управления дополнительным грузом связаны следующим образом. Дополнительный груз 7 движется в направляющих полозьях 12 вверх под воздействием рычага 10, а вниз - под действием собственного веса. Второе плечо рычага 10 является якорем силового реле 9. Пружина 11 прикреплена к корпусу узла и рычагу 10. Вход силового реле 9 соединен с входом реле 16 времени, входом его первого контакта 22 и входом первого контакта управляющего реле 15 Выходы силового реле 9, управляющего реле 15 и реле 16 времени подключены к корпусу узла. Чувствительный элемент первого концевого выключателя 13, на который воздействует дополнительный груз в верхней точке траектории его движения, кинематиче- ски связан с якорем собственного контакта. Чувствительный элемент второго концевого выключателя 14, на который воздействует дополнительный груз 7 в нижней точке траектории его движения, кинематически связан с якорем собственного контакта 21. Питающий вход узла соединен с выходом первого контакта реле 21 времени и входом контакта первого концевого выключателя 19. Выход этого контакта соединен с входом контакта второго концевого выключателя 14 и выходами первого контакта 17 и второго контакта 18 управляющего реле 15. Вход этого реле соединен с входом второго контакта 18 управляющего реле 15 и выходом контакта 20 второго концевого выключателя 14.
Ичмеритель вязкости и плотности жидкости работает следующим образом.
В то время, когда зонд I поднимается в верхнюю точку траектории своего движения, узел 8 управления дополнительным грузом снимает дополнительный груз 7 с противовеса 2. Поскольку вес зонда 1 с учетом действующей на него выталкивающей силы боль- ше веса противовеса 2, он начинает погружаться в жидкости, увлекая за собой груз 3 и поднимая противовес 2. Смещение троса 3 приводит к вращению блока 4, которое контролируетс отметчиком 5 угла поворота. Сигнал о повороте блока 4 на заданный угол передается отметчиком 5 угла поворота в вычислительный блок 6, который измеряет время поступления сиг- нала и запоминает в своей памяти коды углов, на которые последовательно поворачивается блок 4, и коды времен, которым соответствуют повороты блока 4 на измеренные углы. При из- вестном радиусе изгиба троса 3 на блоке 4 указанных данных достаточно для последующих расчетов скоростей и ускорений движения зонда 1 на различных участках траектории его дни- жения. Как только в процессе погружения 1 достигнет нижней точки погружения, узел 8 управления дополнительным грузом вновь нагрузят противовес
2дополнительным грузом 7. Суммарный вес противовеса 2 и дополнительного груза 7 создает условия для всплытия зонда 1. Блок 4 под действием троса
3вращается в противоположную сторон Отметчик 5 угла поворота 5 вновь вы дает в вычислительный блок 6 информацию о повороте блока 4 на заданный угол, а вычислительный блок 6 измеряет времена поступления сигналов и запоминает коды углов и времен в сво ей памяти. Этой информации достаточно для последующих расчетов скоростей и ускорений на различных участках траектории движения зонда 1 при всплытии. По рассчитанным скоростям и ускорениям при погружении и всплытии вьнислительный блок 6 рассчитывает и печатает измеренные значения вязкости и плотности жидкости.
Узел управления дополнительным грузом работает следующим образом.В процессе движения зонда 1 вверх, а следовательно,опускания противовеса 2 и нагружающего его дополнительного груза, наступает момент времени, когда дополнительный груз 7 своим воздействием на чувствительный элемент второго концевого выключателя 14 вызывает его срабатывание. Замыкается контакт 20 этого реле. С питающего входа узла напряжение через замкнутый в этом режиме контакт 19 первого концевого выключателя 13 и замкнувшийся контакт 20 второго концевого выключателя 1 4 будет приложено к управляющему реле 15.Оно срабатывает и замыкает свои первый 17 и второй 18 контакты. Замкнувшийся второй контакт 1 8 делает цепь питания управляющего реле 15 независимой от состояния второго концевого выключателя 14. Через первый контакт 17 этого реле питающее напряжение подается на силовое реле 9 н реле 16 времени. Силовое реле 9, воздействуя на одно из плеч рычага 10, притягивает его. Другое плечо рычага 10, воздействуя на специальные штыри дополнительного груза 7, поднимает его и удерживает в верхнем положении Реле 16 времени замыкает свой контакт 21 и удерживает его в этом состоянии промежуток времени, достаточный для движения зонда 1 вниз в цикле измерения. В верхней точке тра- эктории своего движения дополнительный груз 7 , воздействуя на первый концевой выключателья 13, размыкает его контакт 19. Поэтому, когда реле 16 времени, в очередной раз размыкает свой первый контакт 21 , питающий вход отключается от силового ре- ле 9 и других элементов схемы узла. Рычаг 10 под воздействием пружины 11 возвращается в положение, когда его плечо не мешает дополнительному грузу 7 двигаться вниз. Он вновь погружает противовес 2, и характер его движения вниз предопределится силами веса зонда I, противовеса 2 и дополнительного груза 7, а также силами воздействия на зонд 1 со стороны жидкости. По мере снижения дополнительного груза 7 он вновь воздействует на второй концевой выключатель 14, который замыкает свой контакт 20. Начинается новый цикл работы узла. , Направляющие полозья 12 обуславливают движение дополнительного груза 7 по заданной траектории без перекосов.
Расчет вязкости и плотности контролируемой жидкости выполняется особенно просто, если зонд 1 на некоторых конечных участках траектории погружения и всплытия движется равномерно. В этом случае для погружения и всплытия соответственно имеют место следующие соотношения:
- Fe - О + F
ч - - F
-р + Р„ 1, - т , в
где Р, - вес зонда 1 ;
+ V °
(1)
Рп - вес противовеса 2;
PIJ - вес дополнительного груза 7;
силы сопротивления вязкой жидкости движению зонда 1 при погружении и всплытии соответственно f
- действующая на зонд 1 выталкивающая сила.
Суммируя уравнения системы (1), преобразуют ее к следующему виду:
+ F
Т
(2)
v
Подставляя в уравнение (2) значения сил сопротивления вязких жидкостей в соответствии с законом Стокса, после преобразования получают выражение для расчета измеряемой вязкости
I
67R(V,+ Va)
о;
где Ч - вязкость жидкости;
R - радиус шарового зонда 1, измеренные значения равномерных скоростей движения Эонда 1 при погружении и всплытии соответственно. . Выражая выталкивающую силу, действующую на шаровой зонд 1 , через плотность жидкости рж , а силу сопротивления жидкости его движению - по закону Стокса, после преобразования первого уравнения системы 1 находят
Р«
-WRJI № - р . 4)
где g - ускорение свободного падения.
816428
Аналогичный расчет может быть выполнен и при движении зонда 1 с изменяющейся скоростью. Усложение расчетов происходит за счет появления в системе уравнений (1) дополнительных слагаемых, в том числе учитывающих момент инерции блока 4.
Предлагаемое устройство применимо для жидкостей, обладающих магнитными свойствами, так как не использует приспособления с магнитами, воздействующими на зонд, и, следовательно, нет необходимости перед измерениями исследовать магнитные свойства жидкостей, прежде всего, значение магнитной проницаемости, которая зависит как от природы жидкостей, так и от условий ее хранения.
10
20
5
0
5
0
5
0
Формула изобретения
Устройство для определения вязкости и плотности жидкостей, содержащее чувствительный элемент в виде шарика, приспособление для возвратно-поступательного перемещения его в вертикальном направлении в емкости для исследуемой жидкости и регистратор времени перемещения, о т- личающееся тем, что, с целью расширения области применения устройства для исследования жидкостей, обладающих магнитными свойствами, приспособлением для возвратно-поступательного перемещения выполнено в виде блока с перекинутым через него тросом, на одном конце которого закреплен шарик, а на другом - противовес, и дополнительного груза с осевым отверстием для троса, при этом устройство. также содержит силовое реле, связанное с одним из концов подпружиненного рычага из материала, обладающего магнитными свойствами, второй конец которого кинематически связан с дополнительным грузом, установленным с возможностью перемещения в вертикальных направляющих, выключатели, установленные в крайних точках траектории шарика и связанные с контактами управляющего реле, вход которого через реле времени подключен к входу силового реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения физико-химических параметров жидкости | 1988 |
|
SU1603239A1 |
| Измеритель плотности жидкостей | 1990 |
|
SU1805333A1 |
| Измеритель плотности жидкостей | 1988 |
|
SU1670531A2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ | 1994 |
|
RU2084865C1 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1990 |
|
RU2024909C1 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1988 |
|
RU2022320C1 |
| Датчик параметров жидкости | 1986 |
|
SU1408301A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ | 1994 |
|
RU2082153C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1994 |
|
RU2061217C1 |
| Устройство для определения готовности шлихты | 1989 |
|
SU1654727A1 |
Изобретение относится к устройствам для измерения вязкости и плотности исследуемой жидкости. Целью изобретения является расширение области применения для жидкостей, обладающих магнитными свойствами. При погружении шарового зонда скорость его движения снижается противовесом, связанным с зондом перекинутым через блок гибким тросов. В нижней точке траектории движения зонда противовес нагружается дополнительным грузом, что обусловливает всплытие зонда. Управление дополнительным грузом осуществляется узлом управления, который содержит силовое реле, подпружиненный рычаг, вертикальные направляющие для дополнительного груза, управляющее реле и реле времени. 2 ил.
Фиг.2
| Способ определения вязкости и плотности жидкости | 1975 |
|
SU527637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1300333, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
