314
Изобретение относится к области неразрушающего контроля и может быть использовано для определения координат источника акустической эмиссии в материалах и массивах горных пород.
Целью изобретения является повышение достоверности определения координат источника акустической эмиссии за счет уменьшения погрешности определения момента прихода сигнала акустической эмиссии на преобразователь.
На фиг.1 приведена блок-схема устройства; на фиг.2 - временные диаграммы, иллюстрирующие способ.
Устройство для определения координат источника акустической эмиссии содержит п каналов приема сигналов акустической эмиссии, включающих последовательно соединенные преобразователь 1, избирательный усилитель 2, детектор 3 огибающей, пороговый элемент 4 и D-триггер 5, на D-вход которого подан уровень логической единицы, две группы из последовательно соединенных П-триггеров 6.1,6.2, ..,,6. (1-1) и 7.1,7.2,6 7. (1-1) с подключенными к их выходам и к выходу D-триггера 5 счетчиками 8.1,8.2,8.(21-1), 21-входовый коммутатор 9, соединенный с выходом измерительных счетчиков 8, нуль-орган 10, соединенный входом с выходом усилителя 2, а первым и вторым выходами - соответственно с объединенными С-входами D-триггеров первой 6 и второй 7 групп, двухвходовый элемент И 11, входы которого соединены с выходами последних р-триггеров первой 6.(1-1) и второй 7. (1-1) групп, а также общие для всех каналов последовательно соединенные основной n-входовый коммутатор 12, вычислительный блок 13 и регистрато 14, n-входовой элемент И 15, элемент 16 запрета и генератор 17 импульсов, при этом Р-входы первых D-триггеров первой 6.1 и второй 6.2 групп соединены .с выходом D-триггера 5, выходы коммутаторов 9 соединены с входами коммутатора 12, выходы двухвходовых элементов И 11 соединены с входами n-входового элемента И 15, подключенного выходом к управляющим входам вычислительного блока 13 и элемента 16 запрета, соединенного сигнальным
73
входом с выходом генератора 17 импульсов, а выходом - со счетными входами всех измерительных счетчиков 8, управляющие входы коммутаторов 9 и 12 соединены с вторым управляющим выходом вычислительного блока 13, к первому управляющему выходу которого подключены сбросовые входы всех DQ триггеров 5-7 и измерительных счетчиков 8.
Способ осуществляют следующим образом.
С помощью группы преобразователей
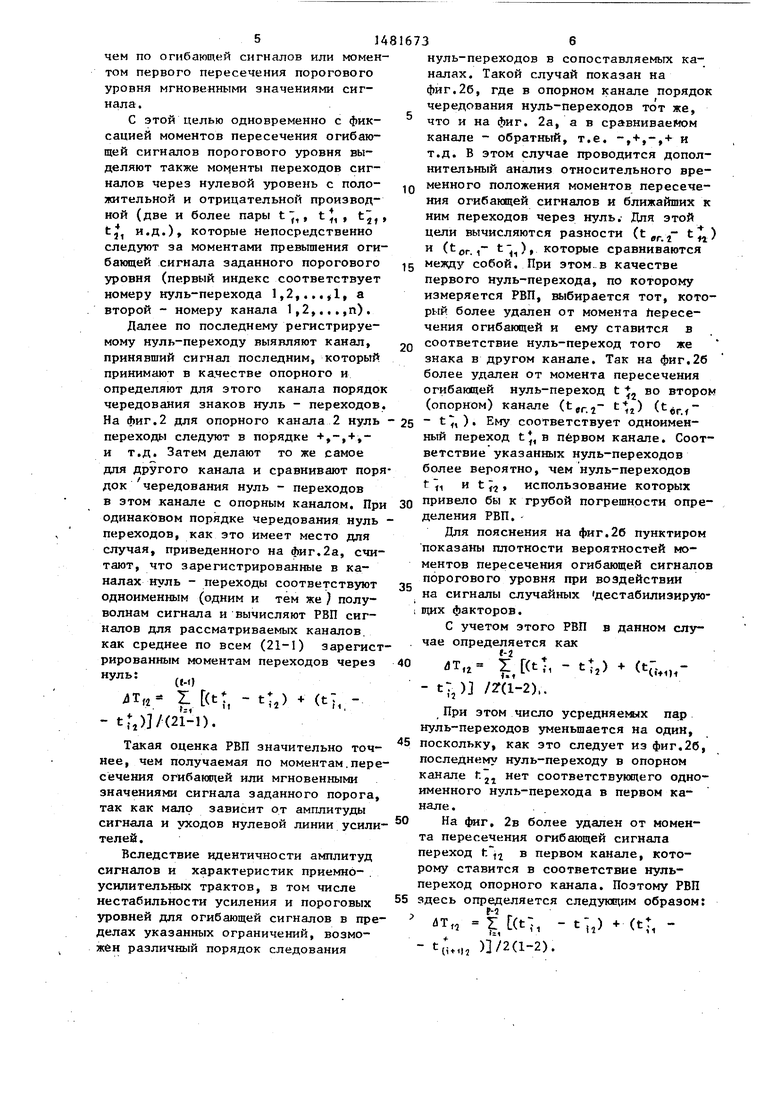
5 1 установленных определенным образом на контролируемом объекте, принимают сигналы акустической эмиссии, выделяют огибающую и фиксируют моменты
tor. i t ог.ч torn превышения
0 огибающей заданного порогового уровня (Лиг. 2а, в, б, где показаны начальные участки сигналов для одной полуволны, принимаемых двумя каналами ). Вследствие различия амплитуд сиг5 налов в каналах, зависящего от расположения датчиков относительно источника акустической эмиссии и неидентичности характеристик каналов, а также из-за нестабильности прро0 говых уровней возникают смещения моментов пересечения огибающей сигнала порогового уровня, что при использовании их в качестве информационных параметров сигналов приводит
с к погрешности определения местоположения источника акустической эмиссии. Аналогичным образом возникают погрешности и при использовании моментов первого пересечения порогового
0 уровня мгновенными значениями сигнала.
Определенная степень различия амплитуд и относительных порогов всегда остается и обусловленное
5 этим, а также другими указанными выше дестабилизирующими факторами смещение моментов пересечения сигналом порогового уровня может быть достаточно большим. В дальнейшем будем полагать, что смещения моментов пересечения огибающей сигнала порогового уровня в каналах за счет дестабилизирующих факторов не превышают половины периода заполнения
е сигнала акустической эмиссии. При этом условии можно с помощью последующих операций получить точность определения разности времен прихода (РКП) сигналов существенно большую,
0
чем по огибающей сигналов или моментом первого пересечения порогового уровня мгновенными значениями сигнала.
С этой целью одновременно с фиксацией моментов пересечения огибающей сигналов порогового уровня выделяют также моменты переходов сигналов через нулевой уровень с положительной и отрицательной производной (две и более пары t ,, t }, , , tjt и.д.) которые непосредственно следуют за моментами превышения огибающей сигнала заданного порогового уровня (первый индекс соответствует номеру нуль-перехода 1,2,...,, а второй - номеру канала 1,2,...,п).
Далее по последнему регистрируемому нуль-переходу выявляют канал, принявший сигнал последним, который принимают в качестве опорного и определяют для этого канала порядок чередования знаков нуль - переходов.
10
нуль-переходов в сопоставляемых каналах. Такой случай показан на фиг.26, где в опорном канале порядок чередования нуль-переходов тот же, что и на фиг. 2а, а в сравниваемом канале - обратный, т.е. ,+,-,+ и т.д. В этом случае проводится дополнительный анализ относительного временного положения моментов пересечения огибающей сигналов и ближайших к ним переходов через нуль. Для этой цели вычисляются разности (tвгf t) и (tor ,- t), которые сравниваются 5 между собой. При этом.в качестве первого нуль-перехода, по которому измеряется РВП, выбирается тот, который более удален от момента пересечения огибающей и ему ставится в соответствие нуль-переход того же знака в другом канале. Так на фиг.26 более удален от момента пересечения огибающей нуль-переход t 2 во втором (опорном) канале (terj- t+z) (t rf20
На фиг.2 для опорного канала 2 нуль - 25 Ј«) ЕмУ соответствует одноимен- переходы следуют в порядке +,-, + ,- ный переход t, в первом канале. Соот- и т.д. Затем делают то же самое
ветствие указанных нуль-переходов более вероятно, чем нуль-переходов Г j, и t п , использование которых привело бы к грубой погрешности определения РВП. для другого канала и сравнивают порядок чередования нуль - переходов в этом канале с опорным каналом. При одинаковом порядке чередования нуль переходов, как это имеет место для случая, приведенного на фиг.2а, считают, что зарегистрированные в каналах нуль - переходы соответствуют одноименным (одним и тем же ) полуволнам сигнала и вычисляют РВП сигналов для рассматриваемых каналов. как среднее по всем (21-1) зарегистрированным моментам переходов через нуль:
ЛТ(2
(И)
Ј , - tT
fz
i2
) + tT« - (21-l).
Такая оценка РВП значительно точ- 45 поскольку, как это следует из фиг.26, нее, чем получаемая по моментам.пере- последнему нуль-переходу в опорном
канале t2г нет соответствующего одноименного нуль-перехода в первом канале.
сечения огибающей или мгновенными значениями сигнала заданного порога, так как мало зависит от амплитуды сигнала и уходов нулевой линии усили1 телей.
Вследствие идентичности амплитуд сигналов и характеристик приемно- . усилительных трактов, в том числе нестабильности усиления и пороговых уровней для огибающей сигналов в пределах указанных ограничений, возможен различный порядок следования
0
нуль-переходов в сопоставляемых каналах. Такой случай показан на фиг.26, где в опорном канале порядок чередования нуль-переходов тот же, что и на фиг. 2а, а в сравниваемом канале - обратный, т.е. ,+,-,+ и т.д. В этом случае проводится дополнительный анализ относительного временного положения моментов пересечения огибающей сигналов и ближайших к ним переходов через нуль. Для этой цели вычисляются разности (tвгf t) и (tor ,- t), которые сравниваются 5 между собой. При этом.в качестве первого нуль-перехода, по которому измеряется РВП, выбирается тот, который более удален от момента пересечения огибающей и ему ставится в соответствие нуль-переход того же знака в другом канале. Так на фиг.26 более удален от момента пересечения огибающей нуль-переход t 2 во втором (опорном) канале (terj- t+z) (
5 Ј«) ЕмУ соответствует одноимен- ный переход t, в первом канале. Соот-
Ј«) ЕмУ соответствует одноимен- ный переход t, в первом канале. Соот-
ветствие указанных нуль-переходов более вероятно, чем нуль-переходов Г j, и t п , использование которых привело бы к грубой погрешности определения РВП. Для пояснения на фиг.26 пунктиром показаны плотности вероятностей моментов пересечения огибающей сигналов порогового уровня при воздействии на сигналы случайных дестабилизирующих факторов.
С учетом этого РВП в данном случае определяется как
4Т12 Г (tj, - tt2) + (t
i.
Utib
- t:a)3 mi-2),.
При этом число усредняемых пар нуль-переходов уменьшается на один,
45 поскольку, как это следует из фиг.26, последнему нуль-переходу в опорном
канале t2г нет соответствующего одноименного нуль-перехода в первом канале.
50 На фиг. 2в более удален от момента пересечения огибающей сигнала переход t tl в первом канале, которому ставится в соответствие нуль- переход опорного канала. Поэтому РВП
55 здесь определяется следующим образом: м
dT
11
Јt(tH - t-a) + (tt, - t(%l|7 )/2(l-2).
7148
Аналогичным образом определяются РВП для других пар каналов.
С, увеличением числа используемых для оценки РВП нуль-переходов сигналов возрастает точность оценки РВП за счет эффекта усреднения, однако максимальное число нуль-переходов ограничивается возможными перескоками Лазы внутриимпульсного заполнения вследствие взаимодействия различных типов упругих волн в материале. Минимально необходимо фиксировать две пары нуль-переходов в каждом канале, из которых в случае неодинакового порядка следования нуль-переходов для оценки РВП используется только одна пара, обеспечивающая эффект усреднения и компенсации погрешности за счет смещения нулевой линии в каналах, так как моменты положительных и отрицательных нуль -переходов при этом смещаются встречно, а их среднее значение практически не изменяется.
Из. данных формулы для расчета РВП следует, что за время прихода сигнала на преобразователь принимают среднее арифметическое измеренных нескольких моментов перехода сигнала акустической эмиссии через нуль после достижения его огибающей порогового уровня. После этого определяют РВП.
По найденным значениям РВП известными методами вычисляют координаты источника акустической эмиссии.
Устройство, реализующее предложенный способ, работает следующим образом.
В исходном состоянии сигналом с первого управляющего выхода вычислительного блока 13 все D-триггеры 5-7 и измерительные счетчики 8 е.брясывдт ются в нуль. Сигнал акустической эмиссии, принятый одним из п каналов и преобразованный датчиком 1 в электрический сигнал, усиливается далее избирательным усилителем 2 и поступает на детектор огибающей 3 и нуль- орган 10. По огибающей сигнала пороговым элементом 4 формируется прямоугольный импульс, Аронт которого соответствует моменту превышения огибающей порогового уровня. Этим фронтом устанавливается в единицу D-триггер 5, разрешающий счет импульсов измерительным счетчиком 8.1 от генератора 17 импульсов через открытый элемент 16 запрета. С помощью нуль-отзга738
на 10 формируются две последовательности импульсов, привязанных к положительным и отрицательным нуль-переходам сигналов, которые поступают соответственно на С-вХоды D-тригге- ров первой 6 и второй 7 групп. Первый из указанных импульсов , после превышения огибающей заданного порогового
0 УРОВНЯ устанавливает в единицу первый П-триггер одной из групп (6.1 или 7.1 в зависимости от знака нуль-перехода), поскольку на их D-входах действует единичный уровень с выхода D-триггера
5 огибающей 5. С этого момента начинается счет импульсов подключенным к первому Г)-триггеру измерительным счетчиком 8. Каждым последующим импульсом привязки к нуль-переходу
0 устанавливается в единицу следующий D-триггер первой 6 и второй 7 групп. После прихода (1-1) пар положительных и отрицательных нуль-переходов устанавливаются в единицу последние
5 два D-триггера 6.(1-1) и 7.(1-1) и на выходе двухвходового элемента И 11 установится единичный уровень.
Аналогичные процессы происходят при поступлении сигналов акустичес0 кой эмиссии на другие каналы. После приема сигналов всеми каналами и$ик- сации в каадом анале 1-1 пар пепеходов через Нуль относительно моментов превышения огибающей за
г данного порога, единичные уровни установятся на выходах всех двух- входовых элементов И 11 и соответственно на выходе n-входового элемента И 15, что приведет к запиранию
0 элемента 16 запрета и одновременному прекращению поступления счетных импульсов с генератора 17 на все измерительные счетчики 8. В результате в измерительных счетчиках 8 регисте рируются коды, соответствующие
моментам превышения огибающей заданного порога и последующих (1-1) пар нуль-переходов относительно последнего фиксируемого нуль-перехода.
Информация о завершении измерительного цикла по- управляющему входу по- ступает также на- вычислительный блок 13, который через управляемые им коммутаторы 9 и 12 осуществляет ввод
с измерительной информации с измерительных счетчиков 8, После заверше- ния ввода вычислительный блок 13 производит начальную установку каналов и подготавливает устройство к
0
приему следующей локационной серии импульсов. На основе принятой информации в соответствии с указанными при описании способами алгоритмами вычислительным блоком 13 находятся разности времен прихода и вычисляются координаты источника акустической эмиссии. Результаты вычислений, а также промежуточные данные выводятся на регистратор 14.
Формула изобретения
1. Способ определения координат источника акустической эмиссии, заключающийся в том, что сигнал акустической эмиссии принимают несколькими преобразователями, измеряют времена прихода сигнала на преобразователи и по разности времен прихода определяют координаты источника акустической эмиссии, отличающий- с я тем, что, с целью повышения достоверности, выделяют огибающую сигнала акустической эмиссии каждого преобразователя, измеряют времена перехода сигнала акустической эмиссии через ноль после достижения его огибающей порогового уровня, а время прихода сигнала на каждый преобразователь определяют как среднее арифметическое измеренных времен перехода через ноль.
2. Устройство для определения координат источника акустической эмиссии, содержащее последовательно соединенные n-входовый коммутатор, вычислительный блок и регистратор и п каналов, каждый из которых содержит последовательно соединенные преобразователь и избирательный усилитель и пороговый элемент, отличающееся тем, что оно снабжено последовательно соединенными генератором импульсов и элементом запрета, а также n-входовым элементом И, выход KOTqporo подключен к второму входу элемента запрета и второму входу вычислительного блока, а каждый из п каналов снабжен детектором огибающей, включенным между вьг0 ходом избирательного усилителя и вхо- дом порогового элемента, последовательно соединенными Р-триггерами, С-вход первого из которых подключен к выходу порогового элемента, a D5 вход предназначен для подключения к единичному потенциалу, нуль-органом, вход которого связан с выходом избирательного усилителя, а первый выход - с С-входами остальных 1-I П0 триггеров, последовательно соединен- . ными дополнительными 1-1 П-триггера- ми, С-входы которых подключены к второму выходу нуль-органа, 21 счетчиками, первые входы которых соеди5 нены с соответствующими выходами всех П-триггеров, двухвходовым элементом И, входы которого связаны с выходами последних из основных и дополнительных П-триггеров, а выход 0 с соответствующим входом п-входового элемента И, и 21-входовым коммутатором, включенным между выходами всех счетчиков и соответствующим входом n-входового коммутатора, П-вход перво5 го из дополнительных D-триггеров подключен к выходу первого из 1 Р-триг- геров, выходы всех П-триггеров подключены соответственно к счетным входам счетчиков, управляющие входы которых
0 соединены с выходом элемента запрета, а выход окончания обработки вычислительного блока подключен к входам сброса всех D-триггеров, счетчиков и коммутаторов.
VnAl
ton in iff tti Јгг
U,
тг
Упм
m
tort tiz tiz гг гг
a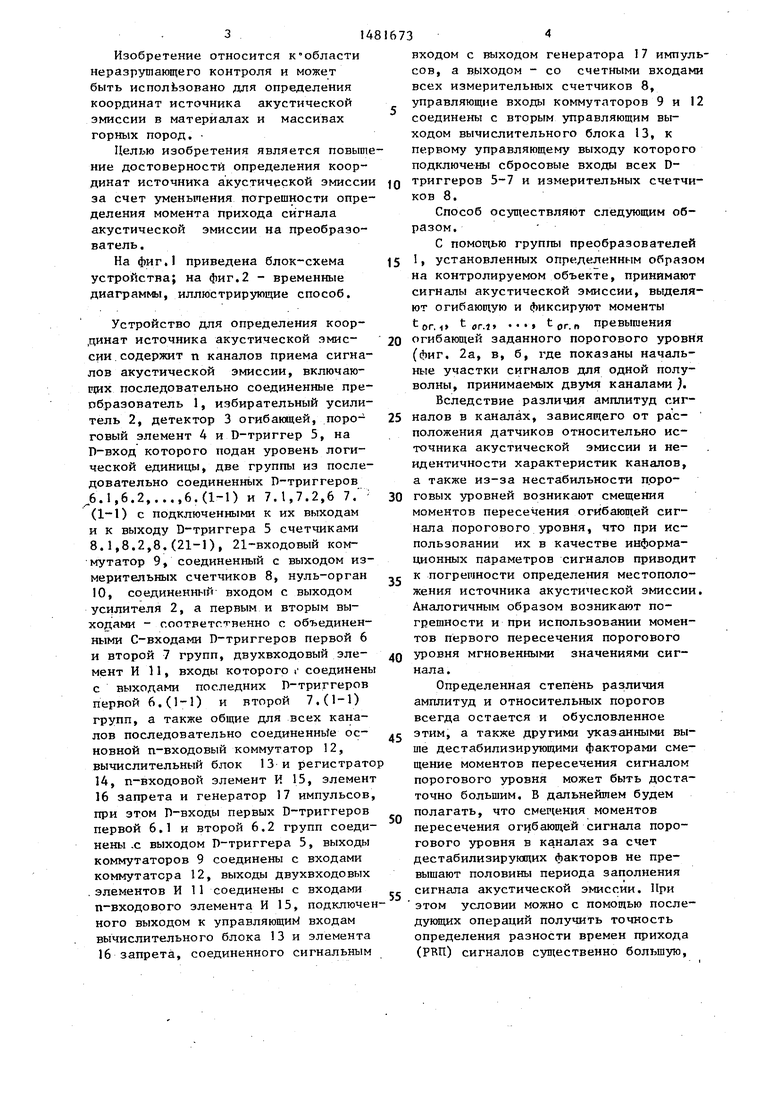

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения местоположения источника акустической эмиссии | 1987 |
|
SU1499224A1 |
| Многоканальное устройство для локации источника акустической эмиссии | 1989 |
|
SU1689840A1 |
| Двухканальное устройство для акустико-эмиссионного контроля | 1988 |
|
SU1508140A1 |
| Устройство для определения координат источника сигналов акустической эмиссии | 1987 |
|
SU1644021A1 |
| Способ контроля дефектов изделий по сигналам акустической эмиссии и устройство для его осуществления | 1987 |
|
SU1644022A1 |
| Способ определения координат источника акустической эмиссии и устройство для его осуществления | 1989 |
|
SU1670589A1 |
| Устройство для контроля изделий методом акустической эмиссии | 1979 |
|
SU903763A1 |
| Многоканальное устройство для определения координат множества одновременно действующих источников акустических сигналов | 1984 |
|
SU1201753A1 |
| Устройство для определения координат источников акустической эмиссии в сварных швах | 1981 |
|
SU1045113A1 |
| СПОСОБ ОБНАРУЖЕНИЯ В ПРОЦЕССЕ СВАРКИ ДЕФЕКТОВ В СВАРНЫХ ШВАХ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ ПО АКУСТИЧЕСКИМ СИГНАЛАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2424510C2 |

Изобретение относится к неразрушающему контролю и может быть использовано для определения координат источника акустической эмиссии в материалах и массивах горных пород. Цель изобретения - повышение достоверности за счет уменьшения погрешности определения момента прихода сигнала акустической эмиссии на преобразователь. Несколькими каналами принимают сигнал акустической эмиссии, выделяют огибающую детектором 3 и сравнивают с пороговым уровнем на пороговом элементе 4. Нуль-орган 10 после этого фиксирует моменты нуль-переходов сигнала, которые подсчитываются счетчиками 8. В вычислительный блок 13 поступает через коммутатор 12 информация со всех каналов, после чего рассчитывается время прихода сигнала на преобразователь 1 как среднее арифметическое значение от времен перехода сигнала через ноль и разность времен прихода на преобразователи 1. По ним рассчитывают координаты источника акустической эмиссии, которые регистрируют регистратором 14. 2 с.п. ф-лы, 2 ил.
ion Ј11 н 2f
rt
U,
ПА2
UnAI
Уплг
t
rt
tort tf1z t t zt
ton ttt tzt tif
п Ј& ttf ff
Фиг. 2
| Грешников В.А | |||
| и др | |||
| Акустическая эмиссия | |||
| - М.: Издательство стандартов, 1976, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Многоканальное устройство для определения координат развивающейся трещины | 1974 |
|
SU504074A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
