1
(21)3994466/31-25
(22)24.12.85
(46) 23.05.89. Бюл. № 19
(71)Новосибирский электротехнический институт
(72)Г.С. Мигиренко, И.И. Гернер, А.Г. Георгиади, Г.В. Хон
и В.А. Тарасов (53) 550.834(088.8) (56) Авторское свидетельство СССР № 205320, кл. G 01 V 1/16, 1966. Авторское свидетельство СССР № 322742, кл. G 01 V 1/16, 1970. (54)(57) 1. СЕЙСМОПРИЕМНИК, содержащий корпус, инертную массу, регистратор перемещений, два упругих элемента, сверху и снизу жестко прикрепленных серединами к инертной массе, регулировочные винты, установленные на
корпусе с возможностью взаимодействия с концами упругих элементов, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения возможности использования сменных инертных масс, в него введены поворотные устройства, установленные на корпусе и связанные с регулировочными винтами, а каждый упругий элемент выполнен в виде двух разнесенных пластин, при этом концы упругих элементов установлены в поворотных устройствах.
2. Сейсмоприемник по п. отличающийся тем, что каждое поворотное устройство выполнено в виде лимба с кареткой, устансяленной на нем с возможностью поворота и фиксации.
1
(/)
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмоприемник | 1981 |
|
SU1035546A2 |
| Прибор для демонстрации колебательных процессов системы | 1986 |
|
SU1341671A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИЗГИБНЫЙ ПРЕОБРАЗОВАТЕЛЬ С РЕГУЛИРУЕМОЙ РЕЗОНАНСНОЙ ЧАСТОТОЙ | 2006 |
|
RU2309435C1 |
| ТРАНСПОРТЕР СЕЙСМИЧЕСКИХ ПРИЕМНИКОВ | 1972 |
|
SU329490A1 |
| СЕЙСМОРАЗВЕДОЧНЫЙ НАЗЕМНЫЙ БОН | 1967 |
|
SU201675A1 |
| БЛОЧНЫЙ ЛУК | 2012 |
|
RU2499969C1 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА С ЧАШКОЙ ПОД ПАРАШЮТ (ВАРИАНТЫ) | 2014 |
|
RU2583102C2 |
| КРЕСЛО ЛЕТНОГО ЭКИПАЖА (ВАРИАНТЫ) | 2014 |
|
RU2620443C2 |
| Сейсмоприемник | 1985 |
|
SU1288643A1 |
| Устройство для формирования обратной стороны шва | 1978 |
|
SU774889A1 |
Изобретение относится к устройствам для приема сейсмических колебаний и может быть использовано в любой области техники, где необходимы высокочувствительные датчики для приема низкочастотных колебаний. Цель изобретения - расширение функциональных возможностей сейсмоприемника путем обеспечения возможности использования сменных инертных масс. Сущность: в сейсмоприемник введены поворотные устройства, установленные на корпусе и связанные с регулировочными винтами, а каждый упругий элемент выполнен в виде двух разнесенных пластин, при этом концы упругих элементов установлены в поворотных устройствах. Каждое поворотное устройство выполнено в виде лимба с кареткой, установленной на нем с возможностью поворота и фиксации. 1 з.п. ф-лы, 8 ил.
Изобретение относится к устройс - вам для приема сейсмических колебаний и может быть использовано в любой области техники, где необходимы высокочувствительные датчики для приема низкочастотных колебаний.
Цель изобретения - расширение функциональных возможностей сейсмо- приемника путем обеспечения возможности использования сменных инертных масс.
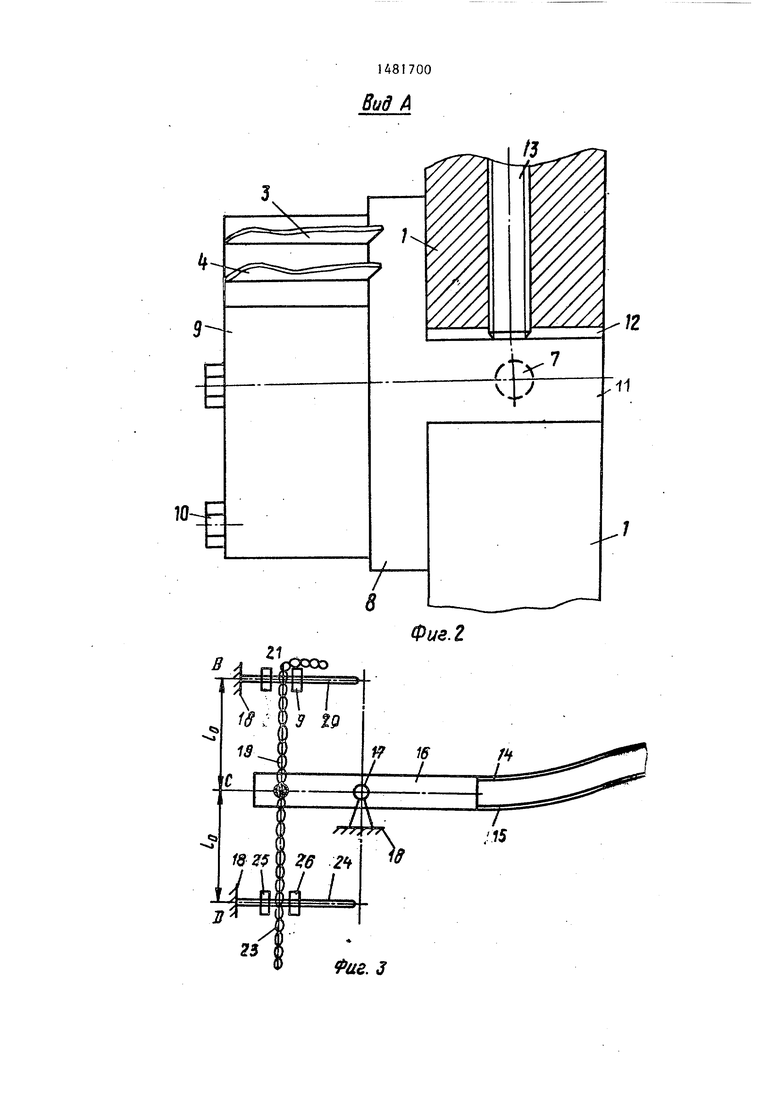
На фиг. 1 схематично показана конструкция сейсмоприемника, фронтальный вид; на фиг. 2 - вид А на фиг.1; на фиг. 3 - схема конструктивного исполнения поворотного устройства с гибким звеном (цепью) в начальном положении, вариант; на фиг, 4 -
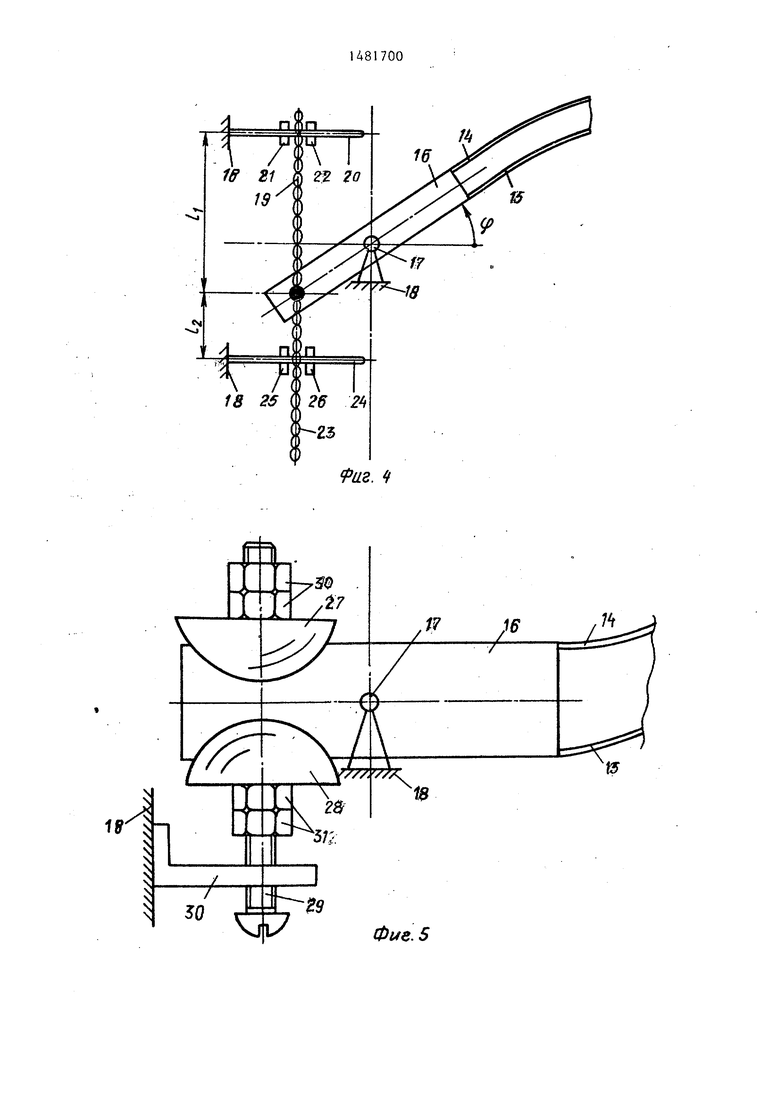
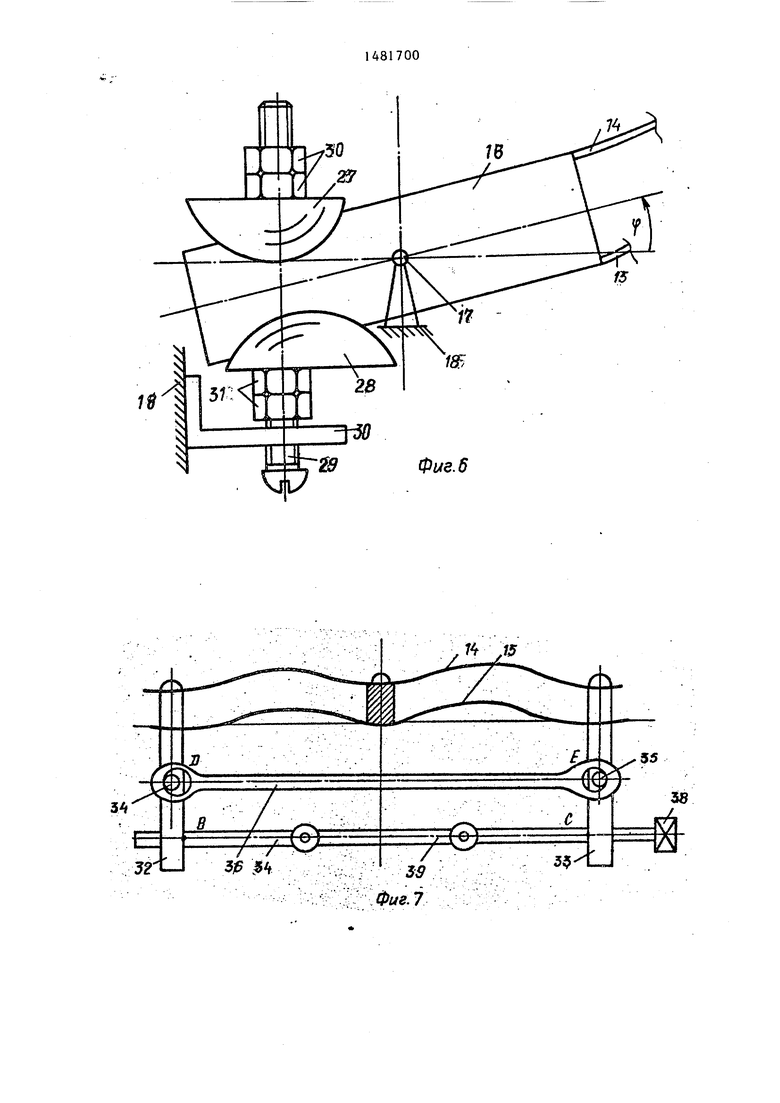
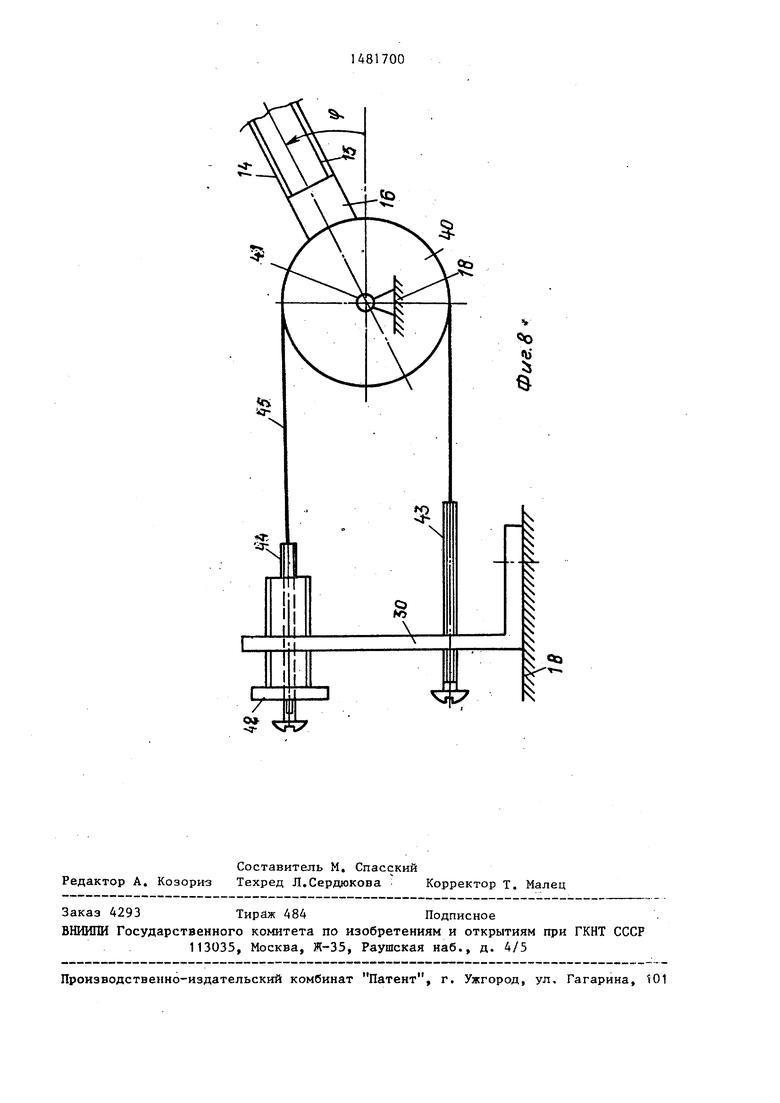
то же, в рабочем положении; ::а фиг.5 - схема конструктивного исполнения поворотного устройства со сферической опорой в начальном положении, вариант; на фиг. 6 - то же, в рабочем положении; на фиг. 7 - схема конструктивного исполнения поворотного устройства с сочлененной гибкой связью, вариант; на фиг. 8 - схема конструктивного исполнения поворотного устройства с соединенной с дифференциальным винтом тросовой тягой, вариант.
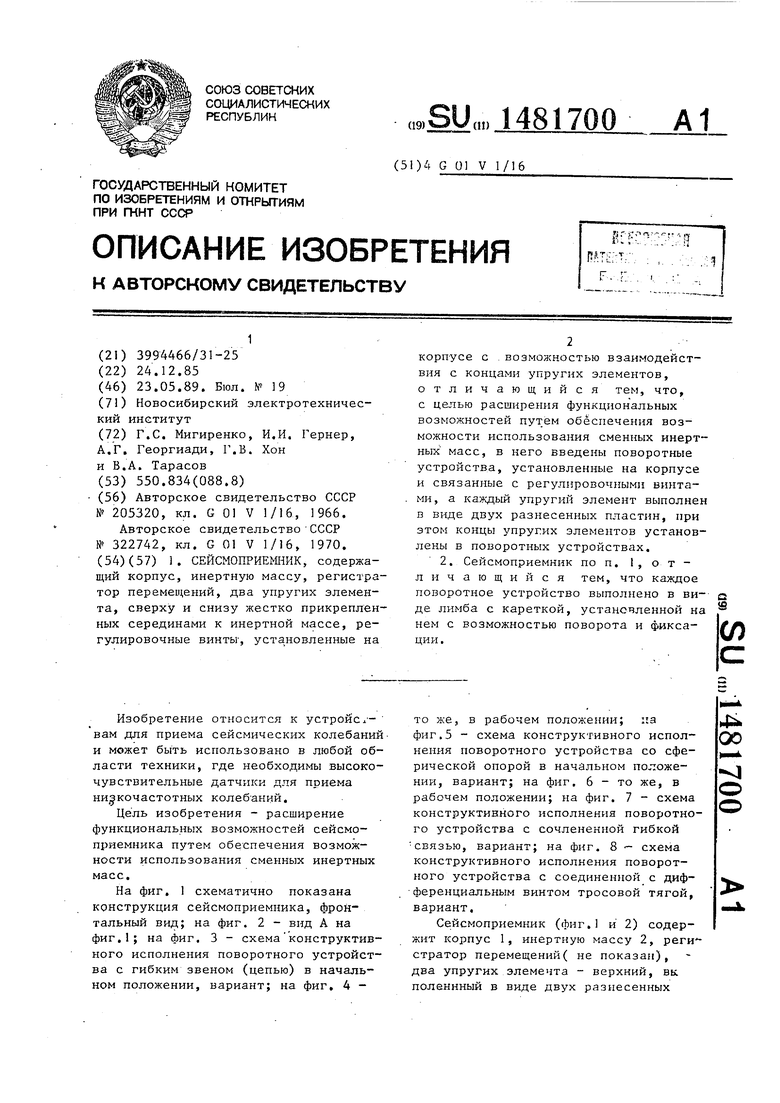
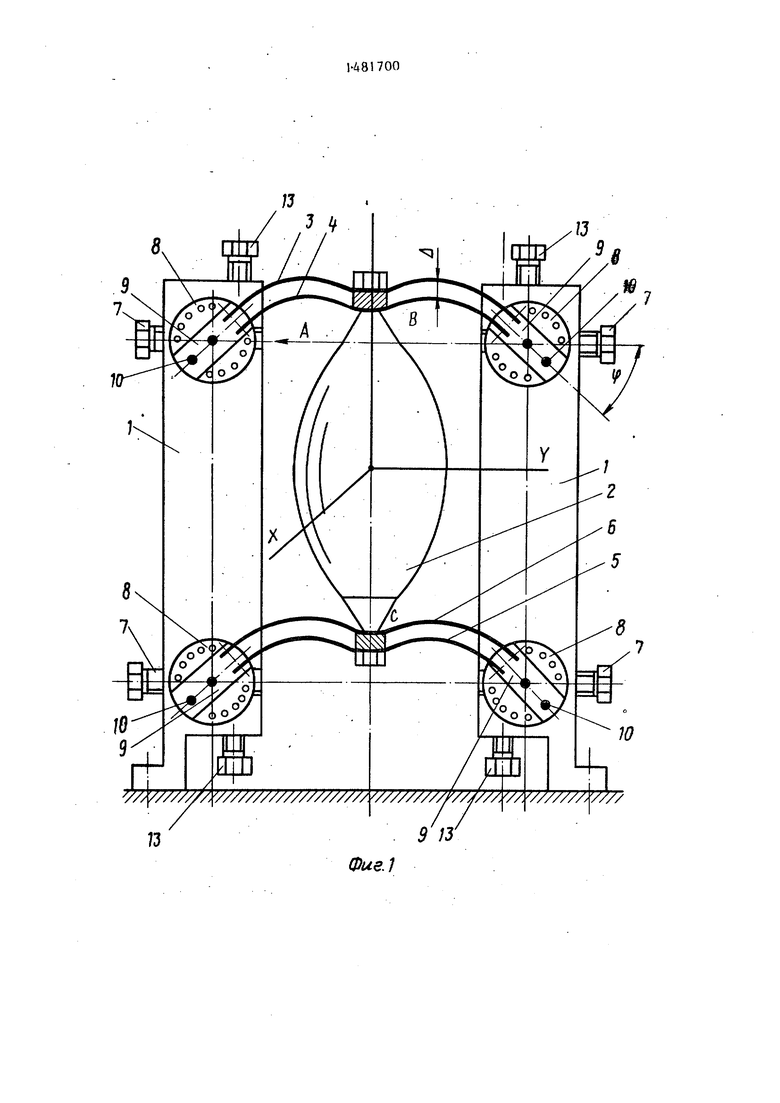
Сейсмоприемник (фиг.1 и 2) содержит корпус 1, инертную массу 2, стратор перемещений( не показан), два упругих элемента - верхний, вк. поленнный в виде двух разнесенных
4
00
31481700
ластин 3 и 4,и нижний, выполненный виде двух разнесенных пластин 5 б, регулировочные винты 7, четыре оворотных устройства, каждое из ко- , орых содержит лимб 8, каретку 9 и иксирующий винт 0.
Два упругих элемента 3, 4 и 5, 6 сверху и снизу в точках В и С ю (фиг.1) прикреплены серединами к нертной массе 2.
Каждое из четырех поворотных устройств 8-10 имеет одну и ту же конструкцию, поэтому рассмотрим подроб- 15 нее одно из них, например левое верхнее (фиг.1 и 2). В каретке 9 жестко защемлены, например, болтами (не показаны) левые концы пластин 3 и 4. Каретка 9 установлена на лимб 8, на- 20 пример насажена на одну с ним центральную ось, т.е. может при регулировках поворачиваться относительно лимба на любой необходимый угол ц. Лимб 8 по периметру набор равноот- 25 стоящих резьбовых отверстий. Каретка 9 имеет возможность после регулировки жестко ( т.е. без возможности поворота ) фиксироваться на лимбе 8 болтом 10 (закрепляться на одном из 30 указанных резьбовых отверстий). Лимб имеет прямоугольный выступ I1, который вставляется в Паз 12, выполненный в корпусе 1, и имеет возможность при регулировке смещаться вдоль оси 35 Y при поджатии регулировочным винтом 7, причем после как поджатие на необходимую величину осуществлено, выступ 11 прижимается (с целью исключения перемещения во время работы) . 40 фиксирующим винтом 13. После того, как болты 13 и 10 затянуты, корпус 1, лимб; 8 и каретка 9 представляет собой единое целое, т.е. не имеют возможности ни перемещаться, ни повора- 45 чиваться один относительно другого.
Возможны несколько различных вариантов конструктивного исполнения поворотного устройства (тот или иной вариант выбирается в зависимости от технологических возможностей и эксплуатационной необходимости).
Поворотное устройство (фиг,1) содержит поворотный лимб 8, каретку 9, фиксирующий болт 10. Концы пластин « закреплены в каретке и могут поворачиваться на необходимый угол qi путец разворота каретки относительно лимба с последующей фиксацией.
50
0 5 0 5
0
Концы упругих пластин I4 и 15 (фиг.З) защемлены на одном конце каретки 16, шарнирно соединенной (с помощью шарнира 17) с основанием (фундаментом) 18, а на другом конце каретке 16 закреплена своей серединой цепь, при этом ее верхний конец 19 соответствующим звеном надет на штырь 20, закрепленный на основании 18, причем верхний конец 19 цепи зафиксирован от перемещения гайками 21 и 22. Нижний конец 23 цепи соответствующим звеном надет на штырь 24 и может фиксироваться, с целью исключения перемещений по штырю, гайками 25 и 26. В начальном положении, когда концы пластин 14 и 15 не повернуты (), длины верхнего и нижнего концов (частей) цепи равны (фиг.З), Если необходимо повернуть концы пластин на угол q и жестко зафиксировать их в таком положении, то гайки 22 и 25 скручиваются со штырей 20 и 24, цепи снимаются со штырей, осуществляется поворот каретки на угол ц и цепи вновь надеваются соответствующими звеньями на штыри (фиг.6). Теперь длина верхней цепи превышает длину нижней цепи. Поскольку цепи практически нерастяжимы, каретка 16 (вместе с пластинами 14 и 15) остается при любых условиях повернутой на угол, что и требуется.
Когда упругих пластин 14 и 15 (фиг. 5) защемлены на одном конце каретки 16, шарнирно соединенной (с помощью шарнира 17) с основанием (фундаментом) 18. На другом конце каретки 16 имеются сферические подвижные опоры 27 и 28, при этом сквозь каретки 16 и опоры 27 и 28 пропущен болт 29, ввинченный в уголок 30, зафиксированный на основании 18, причем каретка 16 и опоры 27 и 28 имеют совпадающие в плане пазы не показаны), что дает возможность болту 29 при регулировках смещаться относительно каретки и сферических опор. Болт 29 снабжен двумя парами фиксирующих гаек 30 и 31 (одна гайка в паре служит для фиксации другой, т.е. от отвинчивания) . В начальном положении () устройство показано на фиг.5. В том случае, когда необходимо защемленные концы пластин 14 и 15 повернуть на угол , гайки 30 и 31 отпускаются, каретка поворачивается, сферические опоры 27 и 28 тоже поворачиваются
51481700
относительно каретки, но при этом их плоскости остаются по-прежнему горизонтальными (фиг. 6), после чего пары гаек 30 и 31 жестко затягиваются и сейсмограф готов к работе.
Кроме того, шарнирное устройство, а вместе с ним и каретка могут при необходимости смещаться (при регулировках) по горизонтали, чем обеспечивается не только поворот, но и под- жатие концов пластин.
Пластины 14 и 15 жестко зафиксированы своими концами на опорных эле-)5 быть достигнуто путем натяжения троса
ментах, например стержнях 32 и 33 (фиг.7). В стержень 32 жестко заделан штырь 34, а в стержень 33 - штыр 35, и в штыри 34 и 35 надета своими проушинами жесткая поперечина 36, причем в стержень 32 ввинчена (левая резьба) шпилька 37, а в стержень 33 (правая резьба) - болт 38. Шпилька 37 и болт 38 соединены шарнирно с помощью тяги 39 (стального прутка, троса, цепи и т.д.). Тяга 39 необходима для передачи крутящего момента от болта к шпильке. При закручивании болта 38 (а также шпильки 37) стержни 32 и 33 подобно рычагам поворачиваются на штырях 34 и 35 и, таким образом, концы пластин поворачиваются на необходимый угол. Тяга 39 позволяет не только передать крутящи момент от болта 38 к шпильке 37, но и устранить нежелательно большие напряжения в болте и шпильке, особенно когда применяются толстые пластины, рассчитанные на большую грузоподъемность.
Пластины 14 и 15 закреплены в кп- ретке 16, жестко соединенной с барабаном 40, насаженным на шарнирную ось 41, базируемую на основании 18 (фиг. 8). На этом же основании жестко закреплен уголок 30, в который вв шчены два болта 42 и 43, имеющие резьбу с шагом, например, h ... В болт
42 ввинчен другой болт 44 (это может JQ обходимую очень низкую частоту
быть обычный микрометрический винт) с очень малым шагом h , т.е. h2«h,. На барабан 40 намотан (например, двумя-тремя витками ) трос 45°и, таким образом, трос, будучи намотан несколькими витками на барабан, проскальзывать относительно него не может. Один конец троса соединен с болтом 43, другой конец с болтом 44.
55
(а именно большой период колеба т.е. при любой величине инертно сы существует возможность получ у сейсмоприемника в вертикально направлении силовую характерист с участком квазинулевой жесткос Это свидетельствует о значитель расширении функциональных спосо тей сейсмоприемника.
Поворот концов пластин 14 и 15 на необходимый угол cf осуществляется следующим образом. Болт 43 отпускается и нижняя ветвь троса прославляется. Болт 42 закручивается, натягивает трос 45 и поворачивает барабан 40 (трос относительно барабана не прокальзыва ет благодаря трению) на необходимый угол -f. Если необходима очень тонкая регулировка несущей способности пластин, т.е. очень точный вывод системы на рабочую точку силовой характеристики, то это может
0
5
0
с помощью микрометрического болта 45, Благодаря ему барабан 40 можно повернуть на доли градуса. После того, как барабан 40 ( а следовательно, и концы пластин 14 и 15 повернуты на необходимый угол ср, болт 43 плотно за- затягивается, нижняя ветвь троса натягивается (также как .и верхняя), и система готова к эксплуатации.
Устройство работает следующим образом.
Под действием сейсмической волны инертная масса, установленная на предварительно тщательно отрегулированной упругой подвеске, совершает длиннопериодические вертикальные колебания, которые записываются, а затем соответствующим образом анализируются и идентифицируются. Пластины при любых вертикальных е рщениях инертной массы работают стабильно, их левые и правые половины (относительно вертикали) всегда остаются зеркально симметричными. В сейсмоприем- нике может быть использована любая но величине инертная масса (1,2,3 кг и т.д.), что позволит Ьолее тщательно идентифицировать сейсмические волны того или иного диапазона, длитель- ности и интенсивности. Причем прецизионная регулировка, включающая одновременные поджатие и поворот концов упругих пластин, позволяет очень точно настраивать сейсмоприемник на не5
0
обходимую очень низкую частоту
(а именно большой период колебаний), т.е. при любой величине инертной массы существует возможность получить у сейсмоприемника в вертикальном направлении силовую характеристику с участком квазинулевой жесткости. Это свидетельствует о значительном расширении функциональных способностей сейсмоприемника.
f«v
f-s
с о r-
CO
СО
сг
Г а
о-
1
Lo
«Ъ
ГГЦ
«JSJ
§
о о
x-l-N
X.
Jbsb
ML/
32
Фие.6
74 Я
Фие.7
