
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНОЕ ПРИСПОСОБЛЕНИЕ | 2001 |
|
RU2207239C2 |
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА | 1997 |
|
RU2146386C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| СПОСОБ СБОРКИ МИКРОУЗЛА ВАКУУМНОГО ПРИБОРА | 2023 |
|
RU2806609C1 |
| Захват манипулятора | 1987 |
|
SU1491703A1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕТАЛЛИЧЕСКОГО АЛЮМИНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631215C1 |
| Электромагнитное устройство для закрепления деталей | 1989 |
|
SU1764938A1 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТОРЕЗОНАНСНЫЙ ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2017 |
|
RU2690699C1 |
| ДАТЧИК ДАВЛЕНИЯ С ЧАСТОТНЫМ ВЫХОДОМ | 1999 |
|
RU2193172C2 |
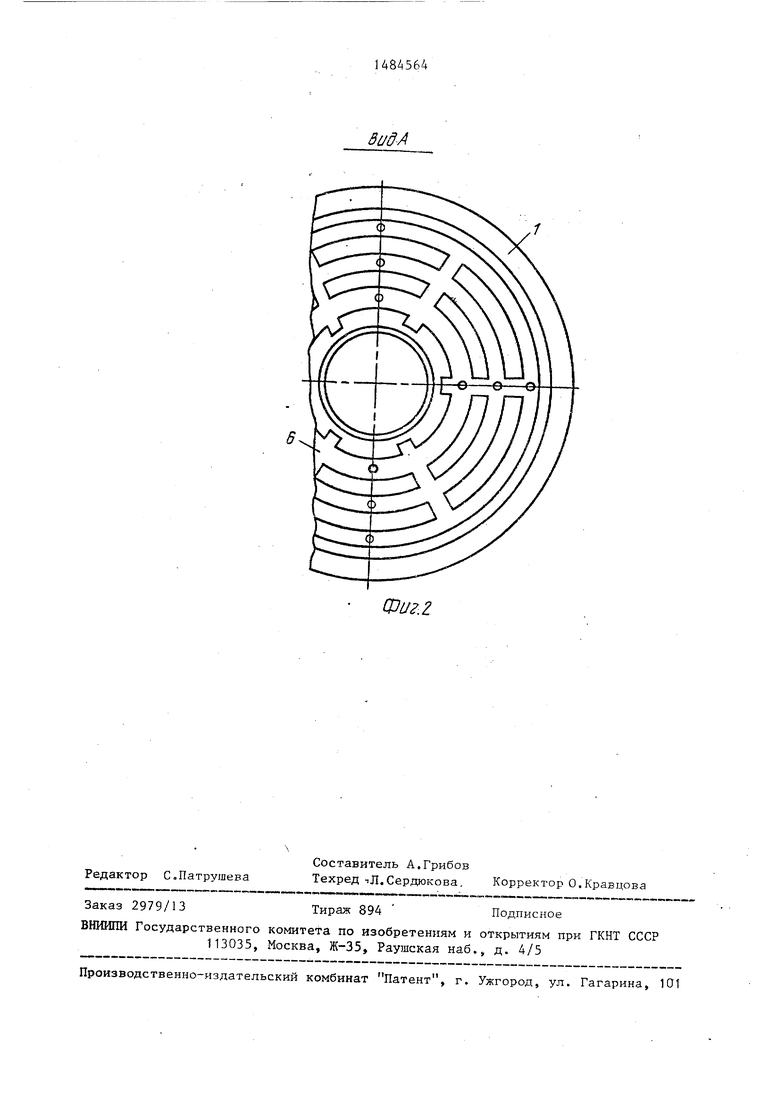
Изобретение относится к металлообработке и может быть использовано для закрепления тонкостенных деталей. Цель изобретения - повышение точности закрепления посредством снижения деформации деталей. В полости корпуса 1 установлены упругий элемент 2, эластичная оболочка 3, металлическая мембрана 4, между которыми расположена мелкодисперстная среда 5. На поверхности мембраны 4 выполнены канавки 6, соединенные при помощи патрубков 7 с вакуумной системой, с которой также с оединена полость корпуса 1. Деталь устанавливают на мембрану 4, и включается вакуумная система. Происходит деформация мембраны 4 и изменяется расположение мелкодисперстной среды 5 . Затем через отверстия 8 откачивается воздух из полости корпуса 1 и происходит затвердение мелкодисперстной среды 5 с с охранением формы установочной поверхности детали. 2 ил.
Фиг.2
| Б. В. КОЛОМИНОБ и П. П. Албанский | 0 |
|
SU325152A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
