s-x уУ
W
ел
;о
о со
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов.
Цель изобретения - повышение надежности захвата.
На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - вид А на фиг. I.
на корпусе 5. При подключении вакуумной системы происходит захват деталей 13-15. Вакуумная система обеспечивает различную степень разрежения в рабочих полостях присоски 12, что дает возможность удержания деталей различной жесткости без их повреждения. Для расфиксации шаровой опоры 4 сжатый воздух стравливается из под мембраны 7, а освобождения деталей рабочие полости присоски 12 соеЗахват манипулятора содержит планку 1,
соединенную с поджимной шайбой 2 пос-Ю диняют с атмосферой, редством болтов 3. Поджимная шайба 2 фиксирует положение шаровой опоры 4 наФормула изобретения корпусе 5. Корпус 5 жестко соединен с рукой манипулятора 6. В полости корпуса 5Захват манипулятора, содержащий кор- расгюложеиа мембрана 7, соединенная с пус, в котором установлена шаровая опо- гой 8. Тяга 8 крепится гайками 9 нара с закрепленной на ней вакуумной при- планке I. На корпусе 5 и поджимнойсоской, рабочая полость которой соединена шайбой 2 установлены уплотнения 10 и 11.с вакуумной системой посредством каналов. На шаровой опоре 4 закреплена присос-выполненных в шаровой опоре и корпусе, ка 12 с несколькими рабочими полостями,причем шаровая опора имеет возможность что позволяет удерживать несколько дета-20 фиксации положения на корпусе посредством лей 13-15.поджимной шайбы, отличающийся тем, что,
Захват манипулятора работает следую-с целью повышения надежности, он снаб цим образом.жен пневмоприводом, при этом поджимная
Рукой манипулятора 6 присоску 12 ориен-шайба имеет возможность фиксации положетируют относительно захватываемых дета-j, ния шаровой опоры посредством упомянулей 13-15. Далее захват опускают и при-того пневмопривода, причем в присоске соска с помощью шаровой опоры 4 самоустанавливается на поверхности упомянутых деталей. Затем под мембрану 7 подают сжатый воздух, мембрана 7 выгибается и
ее движение передается через тягу 8,ЗО разрежения в рабочих полостях присоски,
планку 1 и болты 3 поджимной шайбе 2. этом дополнительные каналы выполПоложение шаровой опоры 4 фиксируетсяйены в шаровой опоре.
выполнены дополнительные рабочие полости, соединенные посредством соответствующих дополнительных каналов с вакуумной системой с обеспечением различной степени
на корпусе 5. При подключении вакуумной системы происходит захват деталей 13-15. Вакуумная система обеспечивает различную степень разрежения в рабочих полостях присоски 12, что дает возможность удержания деталей различной жесткости без их повреждения. Для расфиксации шаровой опоры 4 сжатый воздух стравливается из под мембраны 7, а освобождения деталей рабочие полости присоски 12 соединяют с атмосферой, Формула изобретения Захват манипулятора, содержащий кор- пус, в котором установлена шаровая опо- ра с закрепленной на ней вакуумной при- соской, рабочая полость которой соединена с вакуумной системой посредством каналов. выполненных в шаровой опоре и корпусе, причем шаровая опора имеет возможность фиксации положения на корпусе посредством поджимной шайбы, отличающийся тем, что,
того пневмопривода, причем в присоске
выполнены дополнительные рабочие полости, соединенные посредством соответствующих дополнительных каналов с вакуумной системой с обеспечением различной степени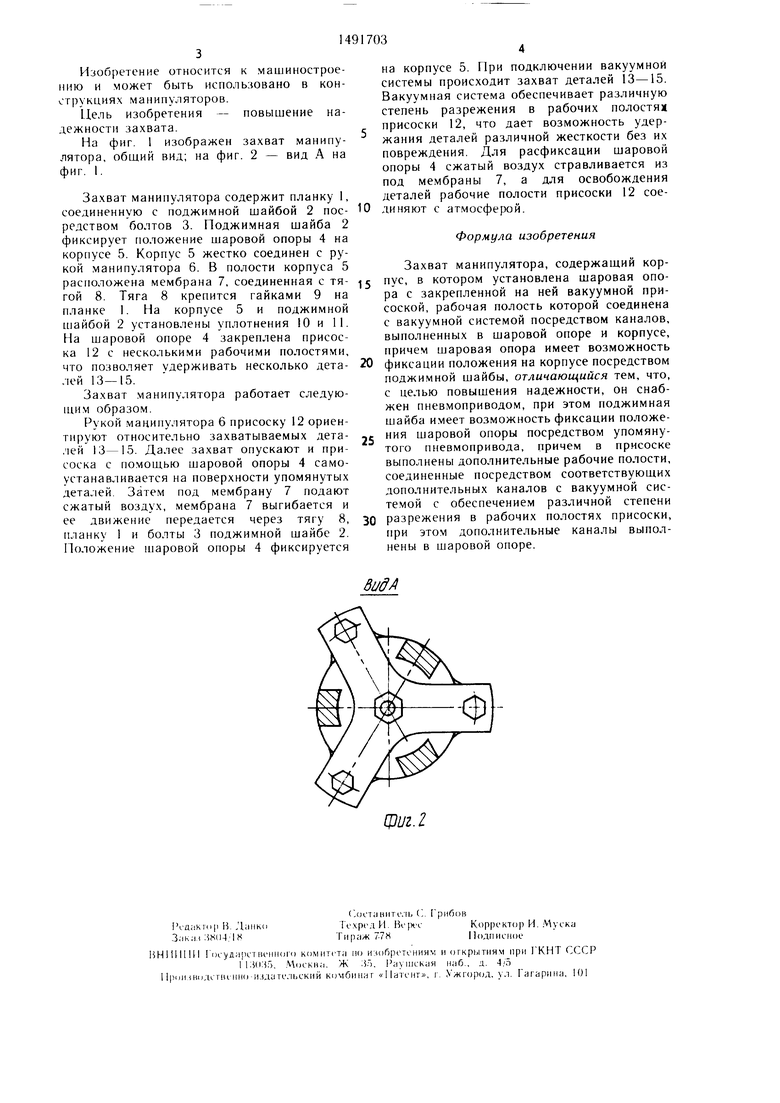
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Вакуумный схват | 1988 |
|
SU1645139A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| ГИБКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА БАЗИРОВАНИЯ | 2012 |
|
RU2495738C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Захват манипулятора | 1991 |
|
SU1815220A1 |
| Вакуумный захват | 1990 |
|
SU1771959A1 |
Изобретение относится к области машиностроения ,в частности, к пневматическим захватным устройствам. Целью изобретения является повышение надежности. Для этого в корпусе 5 расположен пневмопривод, который имеет возможность фиксации положения шаровой опоры 4 с помощью поджимной шайбы 2. На шаровой опоре 4 закреплена вакуумная присоска 12, рабочие полости которой соединены соответствующими каналами с вакуумной системой. Вакуумная система обеспечивает различную степень разрежения в рабочих полостях присоски. После самоустановки вакуумной присоски на деталях 13, 14, 15 в одну из полостей пневмопривода подается сжатый воздух, мембрана 7 изгибается и поджимает шайбой 2 шаровую опору 4 к корпусу 5. 2 ил.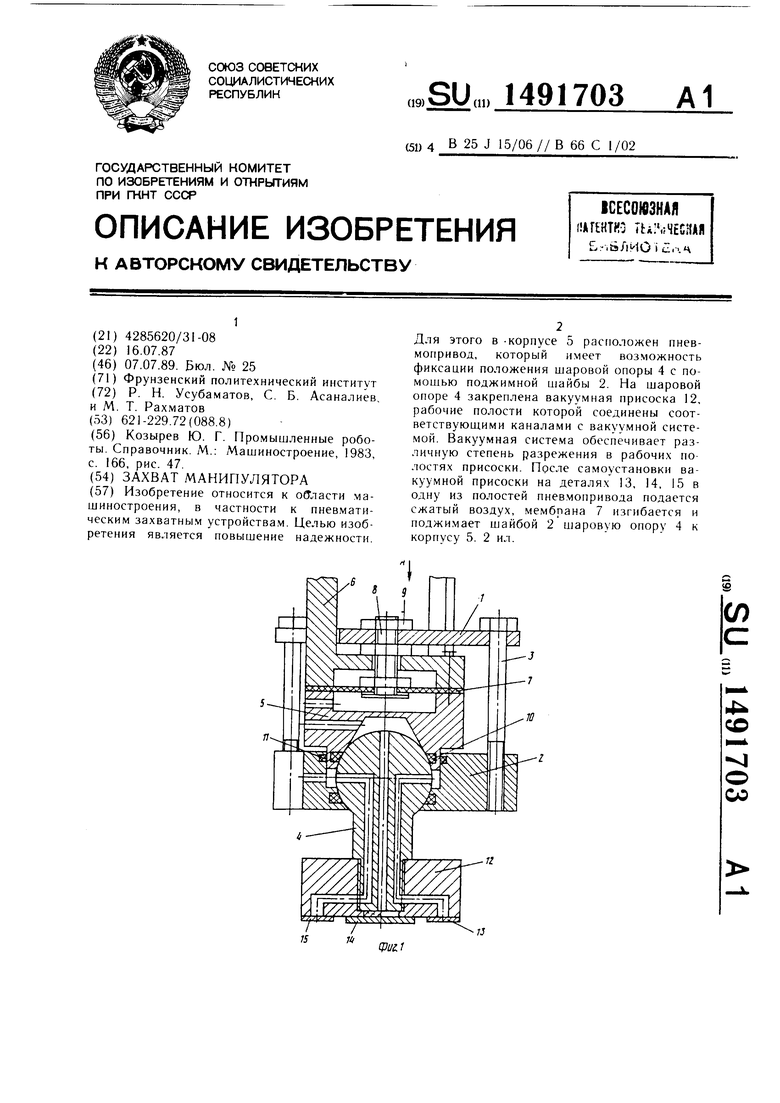
| Козырев Ю | |||
| Г | |||
| Промышленные роботы | |||
| Справочник | |||
| М.: Машиностроение, 1983, с | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
