Известны приводы перфоратора, применяемого для перфорации информационных карт к вычислительным машинам, содержащие электродвигатель, управляющие электромагниты и механизм передачи усилия на пуансон.
Известные приводы перфораторов имеют ряд недостатков: они выполнены со значительным количеством движущихся частей, создающих шум, имеют большую массу привода и ограниченную скорость работы.
Предлагаемый привод перфоратора не отличается от известных те.м, что, в целях увеличения допустимой скорости перфорации и умеяьщения массы подвижных частей, механизм передачи усилия содержит трубчатое тело, эксцентрично посаженное на вращающийся вал и уравновещенное противовесами, рычаг с пружиной, преднаЗначенной для эластичного крепления трубчатого тела и устранения его вращения, и управляемые электромагнитами соединительные звенья для передачи усилия от трубчатого тела к пуансону при включении соответствующего магнита.
С целью упрощения конструкции и принудительного возвратного движения пуансонов в положение покоя, привод содержит ряд скоб, верхние концы которых опираются на трубчатое тело, a нижние соединены с промежуточны.ми звеньями, связанными с пуансонами.
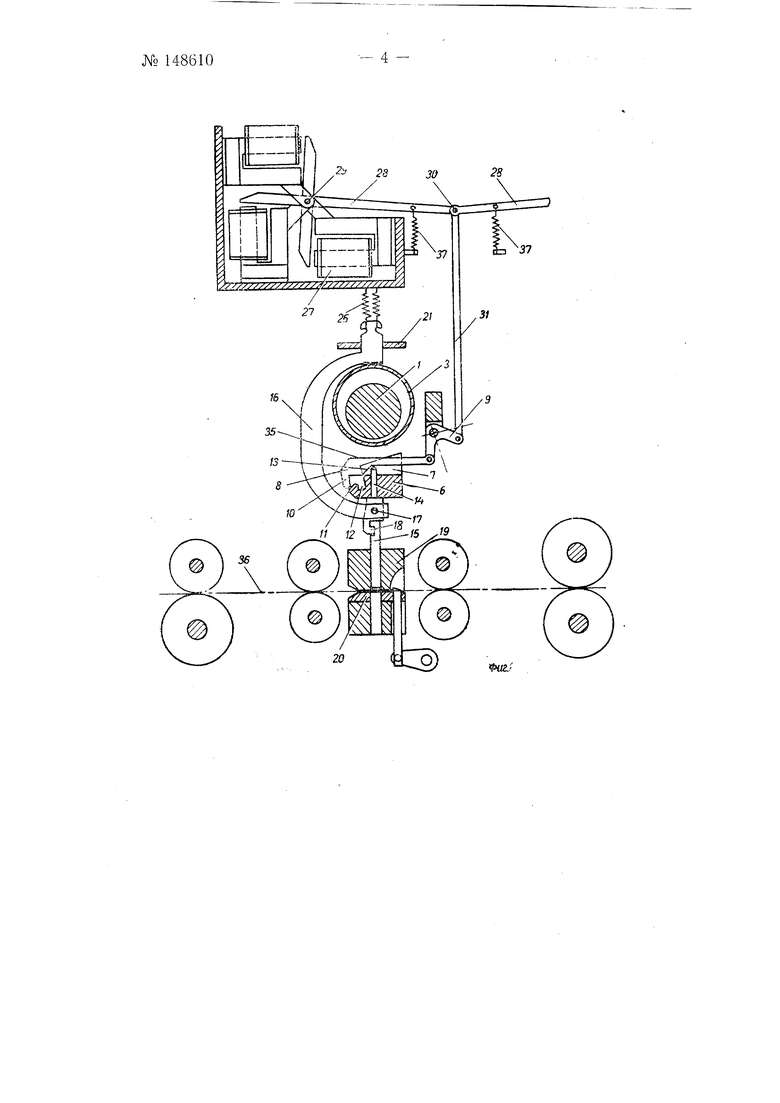
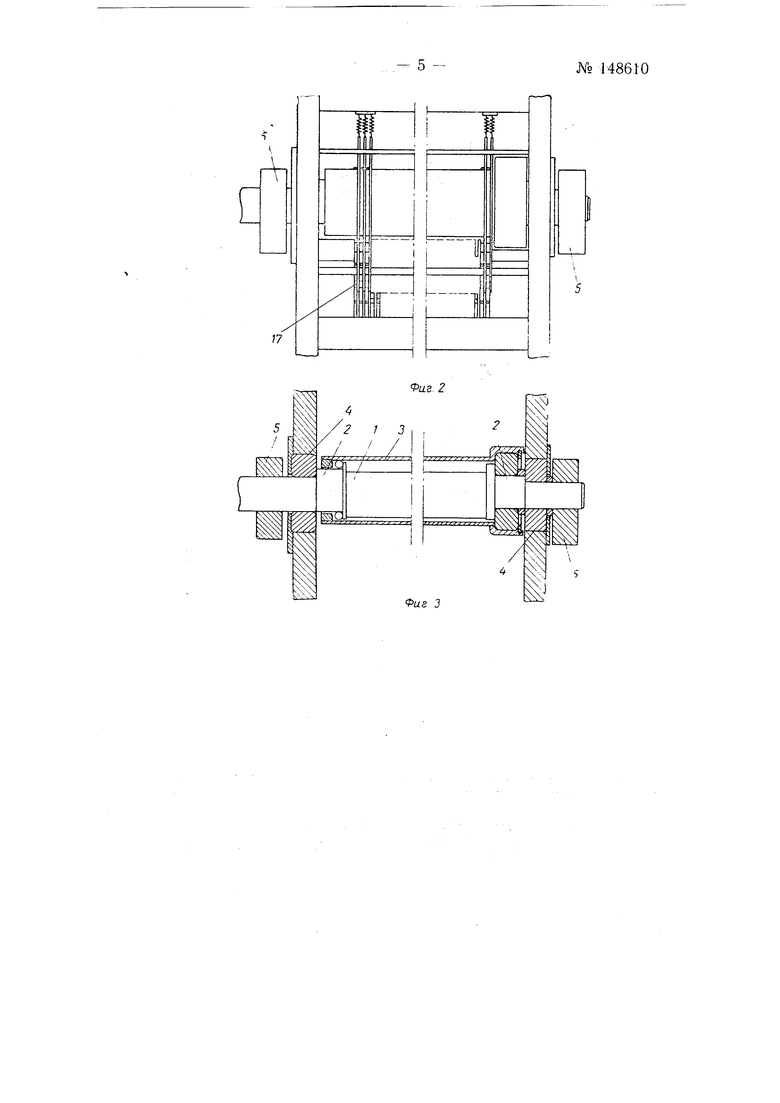
На фиг. 1 показан привод перфоратора, причем управляемые по;,вижные части находятся в состоянии покоя, эксцентрик в верхнем положении; на фиг. 2-то же, вид сбоку; на фиг. 3-продольный разрез приводного вала; на фиг. 4-деталь подвески трубчатой части против прокручивания; на фиг. 5-вариант устройства -возвратного звена.
На приводном валу 1 (фиг. 1), вдоль ряда просечных пуансонов, при помощи шариковых подшипников на двух эксцентриках 2 (фиг. 3)
№ 148610- 2 расположена трубчатая деталь 3. Приводной вал / с подшипниками 4 опирается на корпус перфоратора. На приводном валу расположены тела 5 для уравновешивания всех масс, эксцентрично расположенных на нем. уравновешивзюш,ие массы могут быть расположены также на лриводном валу между опорными подшипниками 4. Под приводным валом установлена траверса 6 со шлицами 7, в которых по мешаются соединительные звенья 8, которые шарнирно присоединены к коленчатым рычагам .9. Последние врашаются на осях, закрепленных в ребрах станины, и направляются ими. В спокойном состоянии соединительные звенья 8 своим заплечиком 10 прилегают к плоскости скоса 11 траверсы 6. Траверса 6 имеет паз 12 для запирания звеньев 8 в рабочем положении. Соединительные звенья имеют подъемный скос 13 для завершения подъема в рабочее положение. Под соединительными звеньями находятся промежуточные звенья 14, также направляемые траверсой, которые передают движение пуансонам 15 для просекания отверстий и возврата их в исходное .положение. Открытые возвратно-направляющие скобы 16 своими шрифтами 17 захватывают промежуточные звенья 14 и приходят в соприкосновение с трубчатым телом с противоположной стороны по отношению к промежуточным звеньям 14, с целью возврата последних.
Для того, чтобы промежуточные звенья 14 не только надавливали на концы пуансонов 15 с целью перфорирова-ния, но также и были бы возврашены в исходное спокойное состояние, нижние концы 18 промежуточных звеньев 14 зубчатым выступом, сбоку, захватывают пуансоны 15. Пуансоны направляются направляющей плитой 19, под которой .с незначительным зазором для пропуска перфораторной карты расположена матрица 20. Вверху возвратная скоба направляется щелевой гребенкой 21.
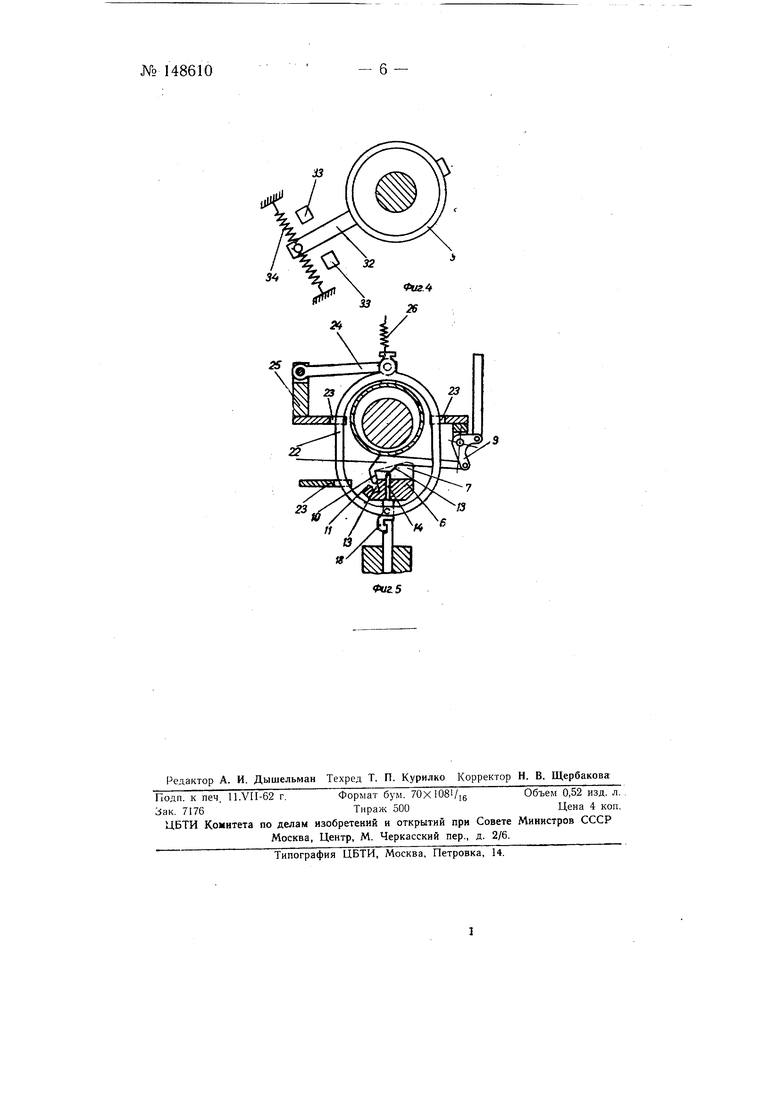
Другая форма исполнения возвратных звеньев представлена на фиг. 5.
В этом случае возвратные звенья 22 имеют замкнутую форму, симметричную по длине; они в трех точках направляются в шлицевых гребенках 23, г Bisepxy связаны с поворотным звеном 24; последнее шарнирно закреплено в поперечине 25 станины.
Каждая скоба 16 и, соответственно, возвратное звено 22 удерживаются в состоянии покоя при помощи пружины 26. Для каладого пуансона предусмотрены таким образам одно соединяющее звено 8, одно промежуточное звено 14 и одно возвратное звено 22.
Управляемые соединительные звенья 8 приводятся в рабочее положение при помощи электромагнитов 27. Ввиду тесного расположения пуансонов, электромагниты 27 установлены в три ряда по две штуки, так что для всех рядов существуют одинаковые передаточные отношения ,и условия трения. Каждый якорь электромагнита жестко соединен с плечом рычага 28, котррый по отношению каждого из трех рядов находится в одинаковом .положении и вращается вокруг общей для всех трех рядов оси 29 вращения. Рычаги 28 при помощи общего шарнира 30 и через соединительные тяги 31 и коленчатые рычаги 9 соединяются с управляемыми соединительными звеньями 8.
Чтобы предотвратить непрерывное вращение трубчатой детали 3, она при помощи подшипников установлена на двух эксцентриках и жестко соединена с рычагом 32, который может отклоняться между двумя упорами 33. Рычаг 32 в одной точке в противоположных направлениях оттягивают две пружины 34, чтобы удержать трубчатую деталь 5 в среднем, эластичном, не щрашающемся (плавающем) положении так, чтобы при пиковых нагрузках (ускорение при возвратно-поступательном движении звеньевых УЗЛОВ нескольких пуансонов) на плоскостях соприкосновения обеспечить легкое качение управляемых деталей (фиг. 4). Чтобы при пиковых нагрузках обеспечить легкое качение, целесообразно трубчатую деталь подразделить на несколько частей в перлендикулярном к продольной оси направлении.
После пуска быстродействуюш,его перфоратора, включающего в себя приводное устройство, привод приходит в непрерывное движение, а вместе с ним и приводной 1вал 1 с эксцентрично расположенными на нем трубчатым телом; в это время другие рабочие части остаются неподвижными. Если перфорацией отверстий необходилю произвести выборку данных, то во время обратного хода трубчатой детали 3 из нижнего положения в верхнее, возбуждают электромагниты 27, и тем самым соединительные звенья 8 перемещаются из левого положения покоя (фиг. 1) в правое рабочее положение (фиг. 5). При этом соединительные звенья 8 в результате подъема их заплечика 10 по .плоскости скоса //, а к концу движения-по плоскости скоса 13 на самих соединительных звеньях приподнимаются и в этом положении удерживаются. К концу движения заплечики 10 находятся напротив паза /2, и верхняя плоскость 55 соединительных звеньев приходит в соприкосновение с наружной боковой поверхностью трубчатой детали 3. В то время, как последняя в соответствии с эксцентричным положением при рабочем ходе движется сверху вниз, луансоны 15 через соединительные звенья 8 и промежуточные звенья 14 отжимаются вниз и производят перфорацию карты 36. Во время этого процесса заплечики 10 соединительных звеньев 8 зажимаются в пазу 12 и тем самым запираются. При обратном ходе скоба 16 и звено возвратное 22 передают возвратные движения на пуансоны 15 через промежуточные звенья 14. Примерно на полпути подъема заплечики 10 управляемых соединительных звеньев 8 выходят из паза 12, и при помощи пружин 37, действующих па плечо рычага 28, возвращаются в левое положение покоя, если только при обратной подаче не включены те же пуансоны. В последнем случае, в результате поBTopnoio возбуждения соответствующих электромагнитов 27, соедшп тельные звенья остаются в рабочем положении.
Предмет изобретения
1.Привод перфоратора, содержащий электродвигатель, управляющие электромагниты и механизм передачи усилия н-а пуансон, отличающийся тем, что, с целью увеличения долустимой скорости перфорации уменьщением массы подвижных частей, механизм передачи усилия содержит трубчатое тело, эксцентрично посаженное на вращающийся вал и уравновещенное противовесами, рычаг с лружиной, предназначенной для эластичного крепления трубчатого тела « устранения его вращения, и управляемые электромагнитами соединительные звенья для передачи усилия от трубчатого тела к пуансону цри включении соответствующего электромагнита.
2.Устройство по п. 1, отличающееся тем, что, с целью упрощения конструкции и принудительного возвратного движения пуансонов в положение покоя, оно содержит ряд скоб, верхние концы которых опираются на трубчатое тело, а нижние соединены с лромежуточНЫМ.И звеньями, связанными с пуансонами.
- 3 148610
2S
0«г..
us.2
/ Л
/ /
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ТРАНСПОРТИРОВКИ ПЕРФОКАРТ | 1970 |
|
SU281296A1 |
| ПРЕССОВЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ДАВЛЕНИЕМ (ВАРИАНТЫ) | 1990 |
|
RU2082614C1 |
| ПРИВОД ПЕРФОРАТОРА | 1967 |
|
SU196466A1 |
| Привод перфоратора | 1982 |
|
SU1037288A1 |
| РЕГУЛИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ДИСКОВОГО ТОРМОЗА | 2009 |
|
RU2495291C2 |
| Устройство для перемещения форм | 1971 |
|
SU646902A3 |
| ПРОБИРНОЙ МЕХАНИЗМ ПЕР<1>&ОРАТОРОБ | 1970 |
|
SU267191A1 |
| Перфорирующая приставка к стартстопному рулонному телеграфному аппарату | 1950 |
|
SU96227A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 1973 |
|
SU382312A1 |
| Перфорирующее устройство | 1978 |
|
SU788129A1 |
У-.--м
Ри.г 3
19
