или
Yt, S(M,Cp ,S t) (,(, t) n(t) 3 1 ,n
Y(t) (U,(t)ЛocCos GD t -t-9;)c () „(tM,, ,(t) n(t),
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРЕМЕННОЙ ДИСКРИМИНАТОР УСТРОЙСТВА ТАКТОВОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2314646C1 |
| УСТРОЙСТВО ТАКТОВОЙ СИНХРОНИЗАЦИИ | 2010 |
|
RU2423798C1 |
| Адаптивное устройство для пространственно-временной обработки фазоманипулированных сигналов | 1984 |
|
SU1234981A1 |
| Устройство тактовой синхронизации | 1983 |
|
SU1166332A1 |
| Адаптивная антенная решетка | 1984 |
|
SU1411861A1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2549360C1 |
| Адаптивный приемник сигналов минимальной частотной манипуляции | 1989 |
|
SU1835611A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМНИК С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ ДЛЯ ПРИЕМА КВАДРАТУРНО-МОДУЛИРОВАННЫХ СИГНАЛОВ ПОВЫШЕННОЙ СТРУКТУРНОЙ СКРЫТНОСТИ | 2013 |
|
RU2544767C1 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2013 |
|
RU2531530C1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение помехоустойчивости. Приемник содержит каналы 1 разнесения, состоящие каждый из адаптивного трансверсального фильтра 2 и регулируемого усилителя 3, фазовый демодулятор 4, сумматор 5, блок 6 принятия решения и определения ошибки, адаптивный трансверсальный фильтр 7 обратной связи, блок 8 управления, блок 9 синхронизации, блок 10 автоматической регулировки усиления, блок 11 формирования управляющего сигнала, регулируемый усилитель 12 обратной связи и сумматор 13 радиосигнала. Входные сигналы через каналы 1 поступают в сумматор 13, где линейно суммируются. Далее полученный сигнал подвергается фазовой демодуляции и поступает в сумматор 5, где обеспечивается компенсация помех межсимвольной интерференции. Блок 6 принятия решения и определения ошибки из полученного сигнала формирует выходной информационный сигнал и сигнал ошибки. Цель достигается введением блока 11 формирования и усилителя 12, с помощью которых формируется компенсирующее напряжение помехи, определяемое соотношением сигнал/шум в канале. 3 ил.
де (Ц (t) , , множитель, характеризующийзатухание при прохождении сигнала (помехи МСИ) по- -му каналу распространения, т.е. амплитудная составляющая коэффициента передачи V-го канала разнесения;
CJ ,GDn - несущая частота сигнала (помехи МСИ);
-Зс -in Учайный фазовый сдвиг сигнала (помехи МСИ) в -м канале разнесения;
n(t) - аддитивная помеха белого шума ;, информационный
параметр сигнала (помехи МСИ).
На выходе сумматора 13 радиосигнаов получается результирующий сигнал, риведенный к одной частоте и фазе.
На выходе фазового демодулятора присутствует видеопоследовательость
S, S(KT) Р.,Х, + и.,
/т
дефц - импульсная характеристика системы;
Xj, - информационная последовательность;
и и +
+ n(t) - возмущающее воздействие шума.
Звездочкой обозначена операция свертки, непрерывная или дискретная.
На выходе блока 6 принятия решения и определения ошибки получают решения Х|, соответствующие величинам О или 1. Кроме того, в блоке 6 принятия решения и определения ошибки осуществляется операция проверки соответствия принятого решения Х| величине текущего значения S | сигнала. На основании видеопоследовательности S 1 и ошибки Л формируются весовые коэффициенты адаптивного транс- версального фильтра 7 обратной связи (gi) и весовые коэффициенты адаптивных трансверсальных фильтров 2 (рц) соответствующих каналов разнесения.
Таким образом, на основании ранее принятых решений X | в адаптивном трансверсальном фильтре 7 обратной связи формируется напряжение хвостов межсимвольной помехи от предыдущих импульсов, компенсирующее эту помеху в принимаемой последовательности.
Следовательно, на выходе адаптивного трансверсаль ного фильтра 7 обратной связи получают значение напряжения межсимвольной помехи (flio, (pp,), сформированное на основании оценокjtiо ,Фп, Л ,XK
Этот алгоритм мянимизирует средне- квадратическое отклонение между входным сигналом, поступающим на блок 6 принятия решения и определения ошиб- ки,-и переданным сигналом.
Однако с учетом ошибок на предыдущих тактовых интервалах сигнал на выходе адаптивного трансверсального фильтра 7 обратной связи не всегда ю имеет желаемые правильные значения, что приводит к увеличению вероятности последующих ошибок, в результате чего появляется тенденция лавинообразного нарастания ошибок,15
Для снижения эффекта размножения лавинообразного нарастания ошибок, в случае единичного неправильного решения, особенно при малом соотношении сигнал/шум на входе, приводяще- 20 го к пороговым эффектам в системе адаптации, в приемник введены блок 11 формирования управляющего сигнала и регулируемьш усилитель 12 обратной связи. На основании напряже- 25 НИИ О или 1 C+Ug) и напряжения с выхода блока 11 формирования управляющего напряжения TUg, Формируется аналоговое напряжение обратной связи,позволяющее более точно сформиро О вать напряжение компенсации МСИ,в этом случае реализуется алгоритм весовой обратной связи. При уменьшении отношения сигнал/шум на входе блока 11 автоматически уменьшается уровень аналогового напряжения обратной связи, в результате чего приемник переходит к плавному уменьшению напряжения компенсации помех МСИ и даже к автоматическому отклонению компенси- 40 рующего напряжения при пропадании- сигнала, предотвращая, эффект появления и размножения ошибок за счет
35
жесткой обратной связи по решению.
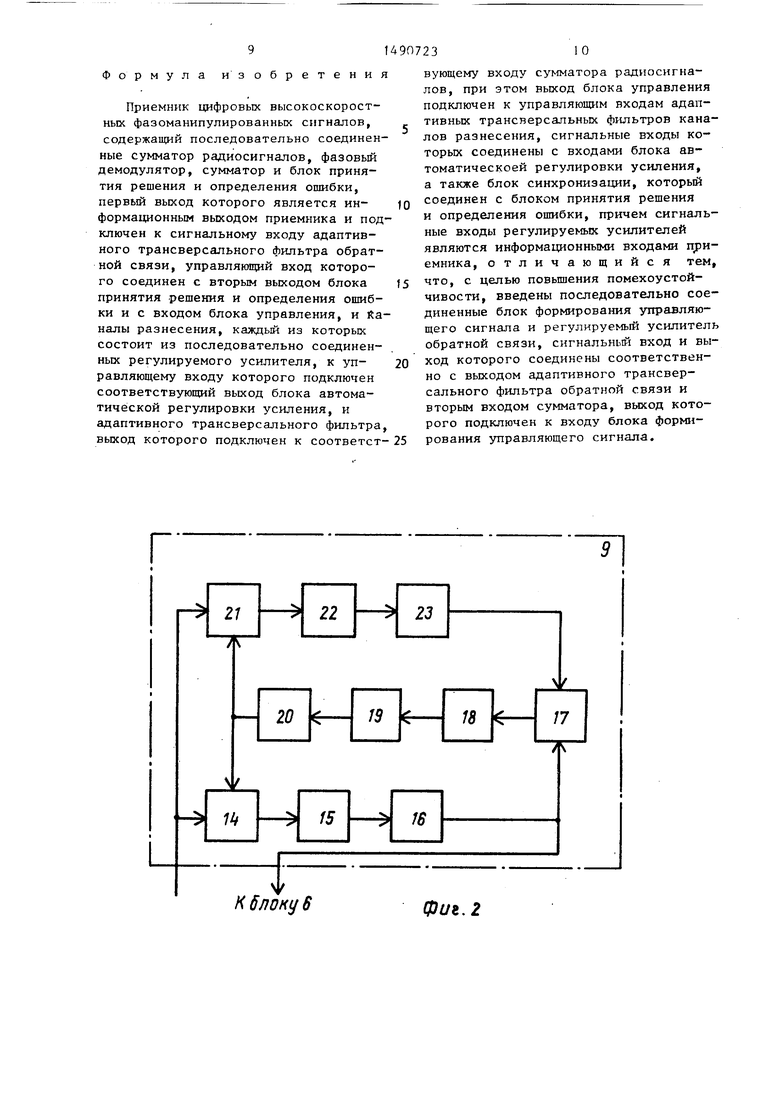
канала: синфазный и среднефазный (со держащий сигнал, сдвинутый на половину тактового интервала). Синфазный канал состоит из интегратора 21, компаратора 22, детектора 23, а сред нефазный канал содержит интегратор 14, аналого-цифровой преобразователь 15 и элемент 16 задержки. Выходы детектора 23 и элемента 16 задержки подключены к входам цифрового перемножителя 17, выход которого через последовательно соединенные цифровой сумматор 18, управляемый генератор 19 и элемент управления подключен к управляющим входам интеграторов 21 и 14 синфазного и средне- фазного каналов. Входы синфазного и среднефазного каналов объединены и являются входом блока 9 синхронизации, куда подается сигнал с блока 6, а выход элемента 16 задержки является выходом блока 9 синхронизаци
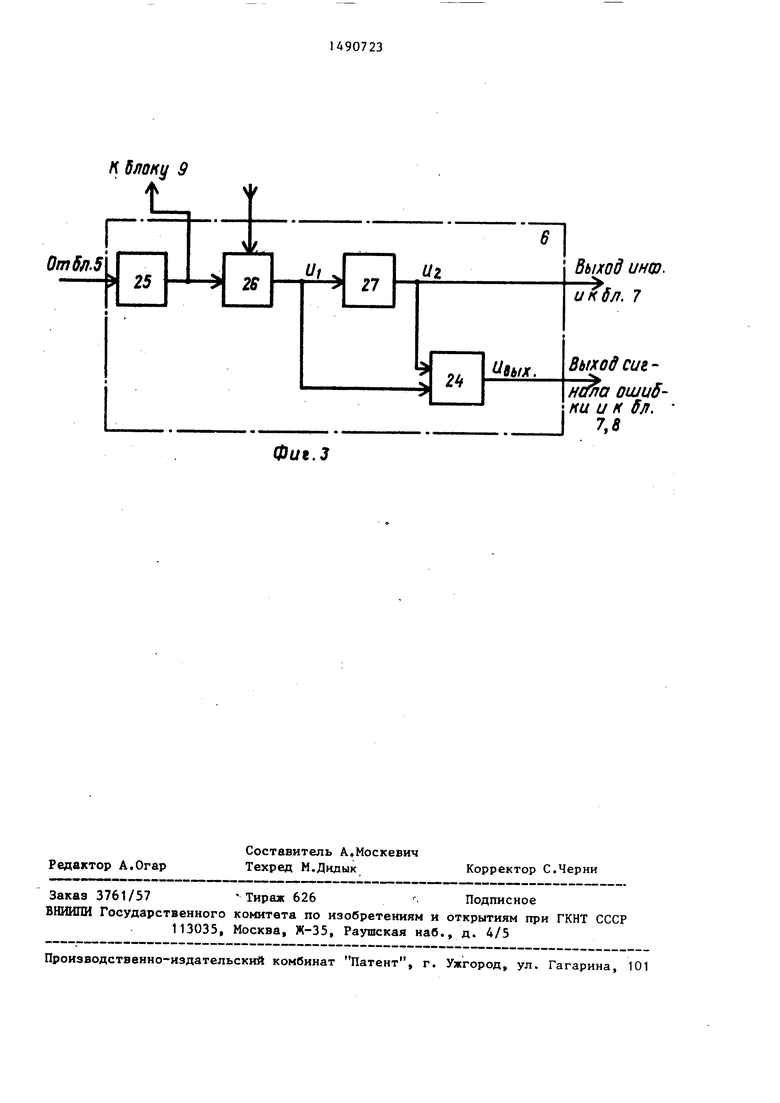
Блок 6 работает следующим образом (фиг.З). Видеосигналы с выхода сумматора 5 поступают на фильтр 25, где осуществляется согласованная по п лосе частот фильтрация. С выхода фильт 25 отфильтрованный сигнал поступает на вход блока 9 синхронизации и в бл°ок 26, где осуществляется выборка и запоминание аналогового значения сигнала, соответствующего импульсам
стробирования, вырабатываемым в бло ке 9 синхронизации.
Отстробированные импульсы с выхода блока 26 поступают на двухпоро говый компаратор 27 и дифференциаль ный усилитель 24. С выхода двухпоро гового компаратора 27 отстробирован ньй и регенерируемый двоичный сигна поступает на выход блока 6 и одновр менно на не и ив ер тирующий вход диффере
циального усилителя 24, на выходе Это обусловлено тем, что гфи ФМ в ка- дз которого формируется сигнал ошибки, нале связи ошибки чаще всего возниСигнал ошибки формируется в соот ветствии:.с выражением
кают при переводе полезного сигнала шумом в малый сигнал, но уже проти- ВОПОЛОЖ1ЮЙ полярности. Поэтому желательно, чтобы в цепях обратной связи при коменсации уштывалась абсолютна величина огибающей принимаемого сигнала на входе блока 11.
Блок 9 синхронизации (фиг. 2) яв ля- ется блоком тактовой синхронизации и может быть реализован на основе синфазно-среднефазной схемы. В блоке 9 синхронизации работают как бы два
О 0
5
канала: синфазный и среднефазный (содержащий сигнал, сдвинутый на половину тактового интервала). Синфазный канал состоит из интегратора 21, компаратора 22, детектора 23, а среднефазный канал содержит интегратор 14, аналого-цифровой преобразователь 15 и элемент 16 задержки. Выходы детектора 23 и элемента 16 задержки подключены к входам цифрового перемножителя 17, выход которого через последовательно соединенные цифровой сумматор 18, управляемый генератор 19 и элемент управления подключен к управляющим входам интеграторов 21 и 14 синфазного и средне- фазного каналов. Входы синфазного и среднефазного каналов объединены и являются входом блока 9 синхронизации, куда подается сигнал с блока 6, а выход элемента 16 задержки является выходом блока 9 синхронизации.
Блок 6 работает следующим образом (фиг.З). Видеосигналы с выхода сумматора 5 поступают на фильтр 25, где осуществляется согласованная по полосе частот фильтрация. С выхода фильтра 25 отфильтрованный сигнал поступает на вход блока 9 синхронизации и в бл°ок 26, где осуществляется выборка и запоминание аналогового значения сигнала, соответствующего импульсам.
стробирования, вырабатываемым в блоке 9 синхронизации.
Отстробированные импульсы с выхода блока 26 поступают на двухпоро- говый компаратор 27 и дифференциальный усилитель 24. С выхода двухпоро- гового компаратора 27 отстробирован- ньй и регенерируемый двоичный сигнал поступает на выход блока 6 и одновременно на не и ив ер тирующий вход дифференциального усилителя 24, на выходе з которого формируется сигнал ошибки,
0
5
Сигнал ошибки формируется в соответствии:.с выражением
со К( и, ),
где К - коэффициент усиления дифференциального усилителя 24;
Uj, и и - напряжения на выходе и входе двухпорогового компаратора 27 соответственно, т.е. сигнал ошибки принимает единичное значение, если мгновенное значение напряжения на входе двухпорогового компаратора 27 находится между его
т порогами срабатьшания U
пор
и и
пор
Формула изобретения
Приемник цифровьк высокоскоростных фазоманипулированных сигналов, содержащий последовательно соединенные сумматор радиосигналов, фазовый демодулятор, сумматор и блок принятия решения и определения ошибки, первый выход которого является ни- формационным выходом приемника и подключен к сигнальному входу адаптивного трансверсального фильтра обратной связи, управляющий вход которого соединен с вторым выходом блока принятия решения и определения ошибки и с входом блока управления, и Ла- налы разнесения, каждый из которых состоит из последовательно соединенных регулируемого усилителя, к уп- равляювдему входу которого подключен соответствующий выход блока автоматической регулировки усиления, и адаптивного трансверсального фильтра, выход которого подключен к соответст-
Г
кблокд 6
вующему входу сумматора радиосигналов, при этом выход блока управления подключен к управляющим входам адап- тивньк трансверсальных фильтров каналов разнесения, сигнальные входы которых соединены с входами блока ав- томатическоей регулировки усиления, а также блок синхронизации, который соединен с блоком принятия решения и определения ошибки, причем сигнальные входы регулируемых усилителей являются информационными входами прк- емника, отличающийся тем, что, с целью повьш1ения помехоустойчивости, введены последовательно соединенные блок формирования управляющего сигнала и регулируемый усилитель обратной связи, сигнальный вход и выход которого соединены соответственно с выходом адаптивного трансверсального фильтра обратной связи и вторым входом сумматора, выход которого под1спючен к входу блока формирования управляющего сигнала.
фиг. 2
0U9.3
| Патент США № 3879664, кл | |||
| Водяной двигатель | 1921 |
|
SU325A1 |
