со
00
о
О)
Изобретение относится к подъемно-транспортным устройствам и может бьггь использовано в кранах, вышках, пожарных лестницах, а также при мон- таже длинномерных конструкций.
Цель изобретения - повышение жесткости подъемника и увеличение его грузоподъемности.
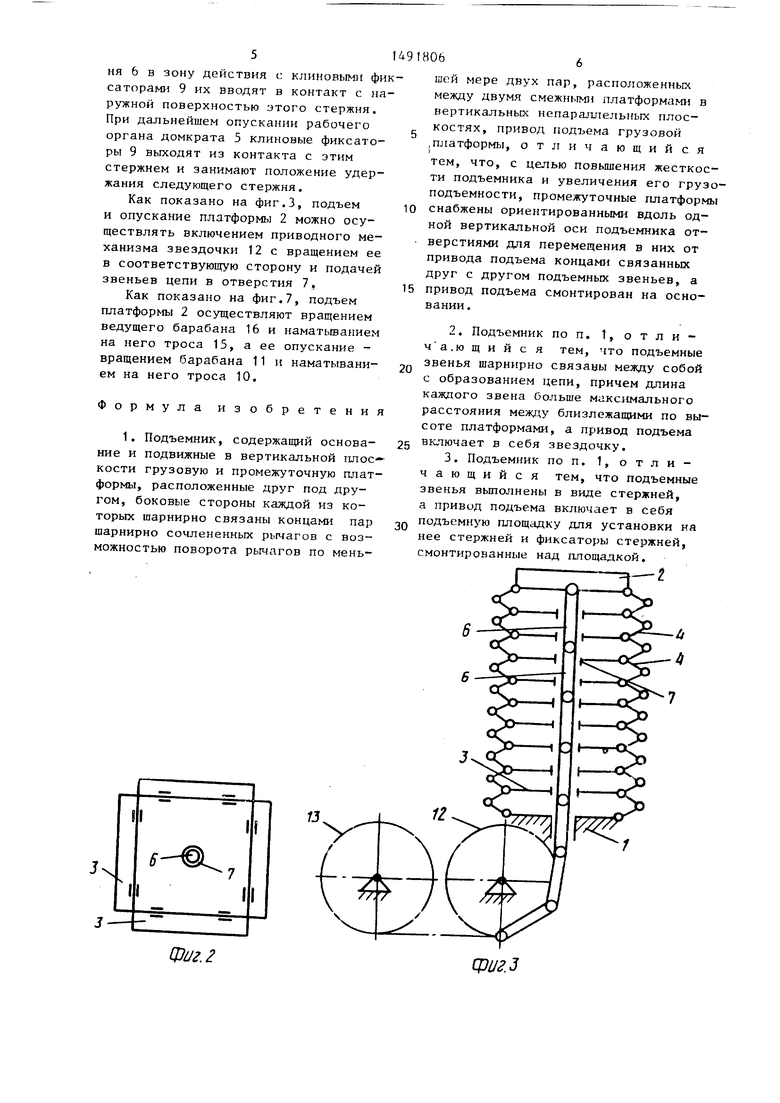
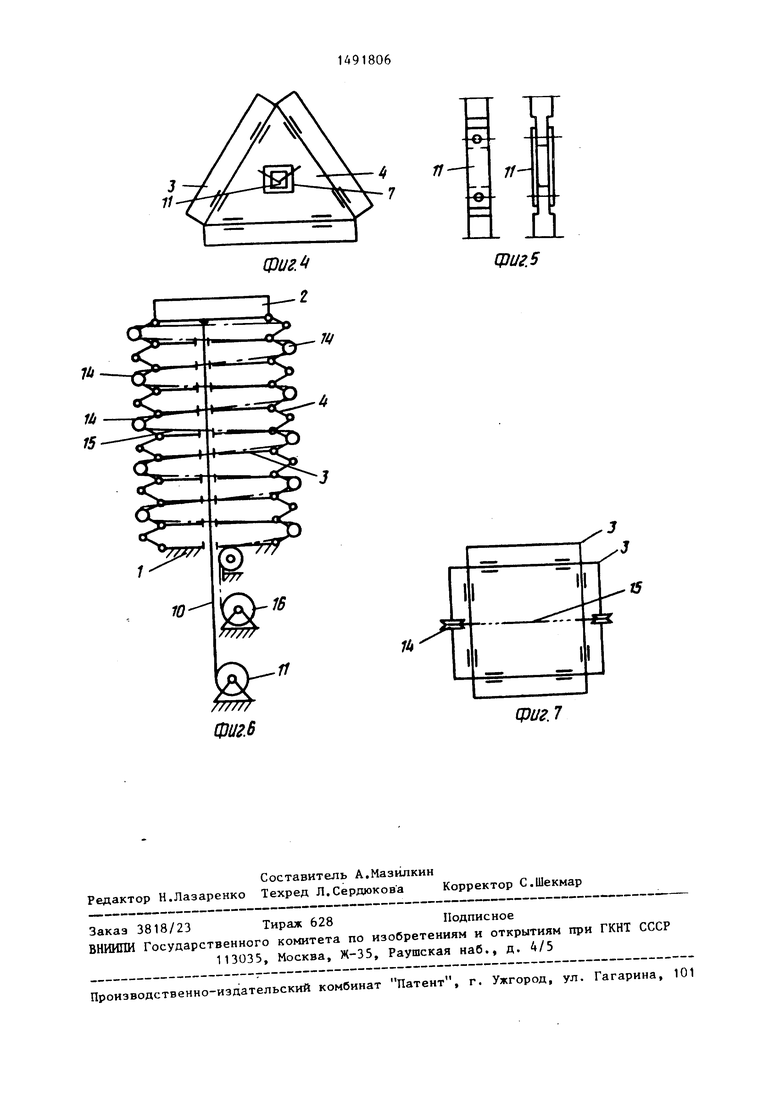
На фиг.1 показан подъемник с приводом в виде домкрата с подъемной площадкой и подъемными стержнями; на фиг.2 - то же, вид в плане; на фиг.З - то же, с приводом в виде цепи с приводной звездочкой; на фиг.4 - то же, вид в плане; на фиг. 5 - фрагмент вьшолнения цепи; на фиг.6 - подъемник с приводом, вьтолненным в виде тросо.блочной системы; на фиг.7 - то же, вид в плане.
Подъемник содержит основание 1, подвижную 2 и промежуточную 3 платформы, связанные между собой посредством шарниров концами рычагов 4. Каждый рычаг 4 попарно шарнирно соединен друг с другом одним концом, а другим - также шарнирно с близлежащими промежуточными платформами 3.
Привод подъемника вьтолнен в виде установленного на основании 1 домкрата 5 периодической подачи друг за другом стержней 6, которыми образована колонна, размещенная между основанием 1 и платформой 2 и пропущенная через отверстия 7, выполненные в промежуточных платформах 4. Длина каждого стержня 6 составляет не менее максимального расстояния , между близлежащими платформами 4. Дпя удержания колонны стержней 6 на основании 1 после подачи очередного стержня 6 домкратом 5 и во время его заправки следующим стержнем 6 на основании 1 в зоне перемещения колонны стержней 6 над подъемной площадкой 8 установлены подпружиненные клиновые фиксаторы стержней 9.
Для повьшения надежности возврата подвижной платформы 2 в исходное положение последняя соединена тросом 10 с приводным барабаном 11, установленным на основании 1.
Привод подъемника может быть (фиг.З) выполнен в виде шарнирно соединенных между собой стержней 6, которыми образована цепь, одним концом соединенная с подвижной платформой 2, ас противоположной стороны кинематически соединенная со звездочкой 12 приводного механизма и накопительным барабаном 13. Длина каждого стержня 6 для улучшения устойчивости подъемника составляет не менее максимального расстояния между близлежащими промежуточными платформами 3. Сама цепь также пропущена в отверстиях 7.
Привод подъемника может быть вьтолнен (фиг.6 и 7) в виде блоков 14, установленных на противолежащих осях шарнирных соединений рычагов 4 и последовательно связанных гибким тросом 15 в трособлочную систему, коренной конец троса которой запа- сован в приводной барабан 16, смонтированный на основании 1.
Подъемник работает следующим образом.
В исходном положении стержни 6 находятся на основании 1 в сложенном состоянии, при этом расстояние между близлежащими промежуточными платформами 3 минимальное, а подвижная платформа 2 занимает крайнее нижнее положение.
Во время подъема платформы 2 приводом рычаги 4 выпрямляются, поворачиваясь в шарнирных соединениях, расстояние между их концами увеличивается и подвижная платформа 2 удаляется от основания 1.
Как показано на фиг.1, домкратом 5 периодически подают стержни 6, которые, образуя колонну, периодически перемещают платформу 2 вверх вместе с грузом (не показан).
После подачи домкратом 5 очередного стержня 6 вверх срабатывает фиксатор 9 и колонна стержней надежно удерживается на основании 1 от перемещения вниз. Размещение колонны стержней 6 в отверстиях 7 обеспечивает высокую устойчивость колонны стержней 6 за счет высокой жесткости конструкции подъемника.
Опускание платформы 2 производят путем периодического перемещения колонны стержней 6 вниз домкратом 5 с последующим их поочередным удалением. Каждый цикл перемещения осуществляют с контакта рабочего орга-- на домкрата 5 с торцом нижнего стержня 6 и отведения клиновых фиксаторов 9 из зоны перемещения колонны стержней 6. После опускания нижнего стерж5
ня 6 в зону действия с клиновыми фисаторами 9 их вводят в контакт с наружной поверхностью этого стержня. При дальнейшем опускании рабочего органа домкрата 5 клиновые фиксаторы 9 выходят из контакта с этим стержнем и занимают положение удержания следующего стержня.
Как показано на фиг.З, подъем и опускание платформы 2 можно осуществлять включением приводного механизма звездочки 12 с вращением ее в соответствующую сторону и подачей звеньев цепи в отверстия 7,
Как показано на фиг.7, подъем платформы 2 осуществляют вращением ведущего барабана 16 и наматьшанием на него троса 15, а ее опускание - вращением барабана 11 и наматывани- ем на него троса 10.
Формула изобретени
1. Подъемник, содержащий основа- ние и подвижные в вертикальной плос кости грузовую и промежуточную платформы, расположенные друг под другом, боковые стороны каждой из которых шарнирно связаны концами пар шарнирно сочлененных рычагов с возможностью поворота рычагов по мень
шей мере двух пар, расположенных между двумя смежными платформами в вертикальных непараллельных плоскостях, привод подъема грузовой ,платформы, отличающийся тем, что, с целью повьпления жесткости подъемника и увеличения его грузподъемности, промежуточные платформ снабжены ориентированными вдоль одной вертикальной оси подъемника отверстиями для перемещения в них от привода подъема концами связанных друг с другом подъемных звеньев, а привод подъема смонтирован на основании.
2.Подъемник по п. 1, о т л и - ч а.ющийся тем, что подъемные звенья щарнирно связаны между собой с образованием цепи, причем длина каждого звена больше максимального расстояния между близлежащими по высоте платформами, а привод подъема включает в себя звездочку.
3.Подъемник по п. 1, отличающийся тем, что подъемные звенья вьшолнены в виде стержней,
а привод подъема включает в себя подъемную площадку для установки на нее стержней и фиксаторы стержней, смонтированные над площадкой,
2
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1988 |
|
SU1549911A2 |
| Подъемник | 1989 |
|
SU1684252A1 |
| Подъемник | 1988 |
|
SU1562308A2 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Подъемник | 1989 |
|
SU1643443A1 |
| Подъемник | 1988 |
|
SU1586994A1 |
| Карьерный подъемник | 1989 |
|
SU1689276A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| АВТОМАТИЗИРОВАННЫЙ МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД И УСТРОЙСТВО ДЛЯ ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОДДОНА | 2001 |
|
RU2212508C2 |
Изобретение относится к подъемно-транспортным устройствам и может быть использовано в кранах, вышках, пожарных лестницах, а также при монтаже длинномерных конструкций. Цель изобретения - повышение жесткости и увеличение грузоподъемности подъемника. Основание 1, подвижная 2 и промежуточные 3 платформы соединены концами пар шарнирно сочлененных рычагов 4 с возможностью поворота по меньшей мере двух пар, расположенных между двумя смежными платформами. Промежуточные платформы снабжены ориентированными вдоль одной вертикальной оси подъемника отверстиями 7 для перемещения в них от привода подъема концами связанных друг с другом подъемных звеньев 6. Длина каждого звена больше максимального расстояния между близлежащими по высоте платформами, а привод подъема смонтирован на основании. 7 ил.
.
срцг.З
7АИ
Фиг.В
IT
/7
11Фиг.5
1U
фиг. 7
| ПОДЪЕМНОЕ УСТРОЙСТВО | 0 |
|
SU270232A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| АКСЕЛЕРОМЕТР С ПРЕОБРАЗОВАТЕЛЯМИ НА ПОВЕРХНОСТНОЙ АКУСТИЧЕСКОЙ ВОЛНЕ | 1998 |
|
RU2139546C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Авторское свидетельство СССР № 914487, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
