(Л
С


| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТУРНОЕ ГОРНОЕ СООРУЖЕНИЕ ДЛЯ ВЫЕМКИ И ТРАНСПОРТИРОВКИ ПОДГОТОВЛЕННОГО РУДНОГО МАССИВА СО ДНА КАРЬЕРА | 2023 |
|
RU2815246C1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ КРУТОПАДАЮЩИХ РУДНЫХ ТЕЛ | 2014 |
|
RU2571776C1 |
| СПОСОБ ОТРАБОТКИ ПОДКАРЬЕРНОЙ ЧАСТИ ЗАЛЕЖЕЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2023 |
|
RU2813518C1 |
| Способ отработки глубоких горизонтов алмазодобывающих карьеров в условиях криолитозоны | 2019 |
|
RU2698750C1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2004 |
|
RU2282721C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЖЕНЫХ АВТОМОБИЛЕЙ-САМОСВАЛОВ НА БОРТ КАРЬЕРА И СПУСКА ПОРОЖНИХ АВТОМОБИЛЕЙ-САМОСВАЛОВ В КАРЬЕР | 2013 |
|
RU2566832C2 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2009 |
|
RU2394158C1 |
| СПОСОБ РЕКОНСТРУКЦИИ КАРЬЕРА С ДВУМЯ БЛИЗКОРАСПОЛОЖЕННЫМИ РУДНЫМИ ТЕЛАМИ | 2006 |
|
RU2314420C1 |
| Способ отработки глубоких карьеров в криолитозоне | 2018 |
|
RU2676352C1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2007 |
|
RU2353771C2 |



Изобретение относится к карьерным большегрузным подъемникам, которые предназначены для подъема и опускания с уступа на уступ по склону борта глубокого карьера горнотранспортного оборудования. Цель изобретения - улучшение эксплуатационных качеств. Установленные на направляющих грузовые платформы связаны между собой тяговым органом. Тяговый орган выполнен в виде продольных и поперечных замкнутых цепей, каждая из которых составлена из шарнирно связанных между собой звеньев. Направляющие содержат горизонтальную поверхность, по которой перемещаются грузовые платформы, ходовая часть которых выполнена из сферических колес. Платформы могут перемещаться не только в продольном направлении, но и в поперечном. 5 з п ф-лы, 11 ил
Изобретение относится к карьерным большегрузным подъемникам, которые предназначены для подъема и опускания с уступа на уступ по склону борта глубокого карьера горнотранспортного оборудования, например вагонов, автобусов, автомашин, загруженных и порожних угле- и породовозов, и может быть использовано в горнорудной и угольной отраслях промышленности.
Целью изобретения является улучшение эксплуатационных качеств.
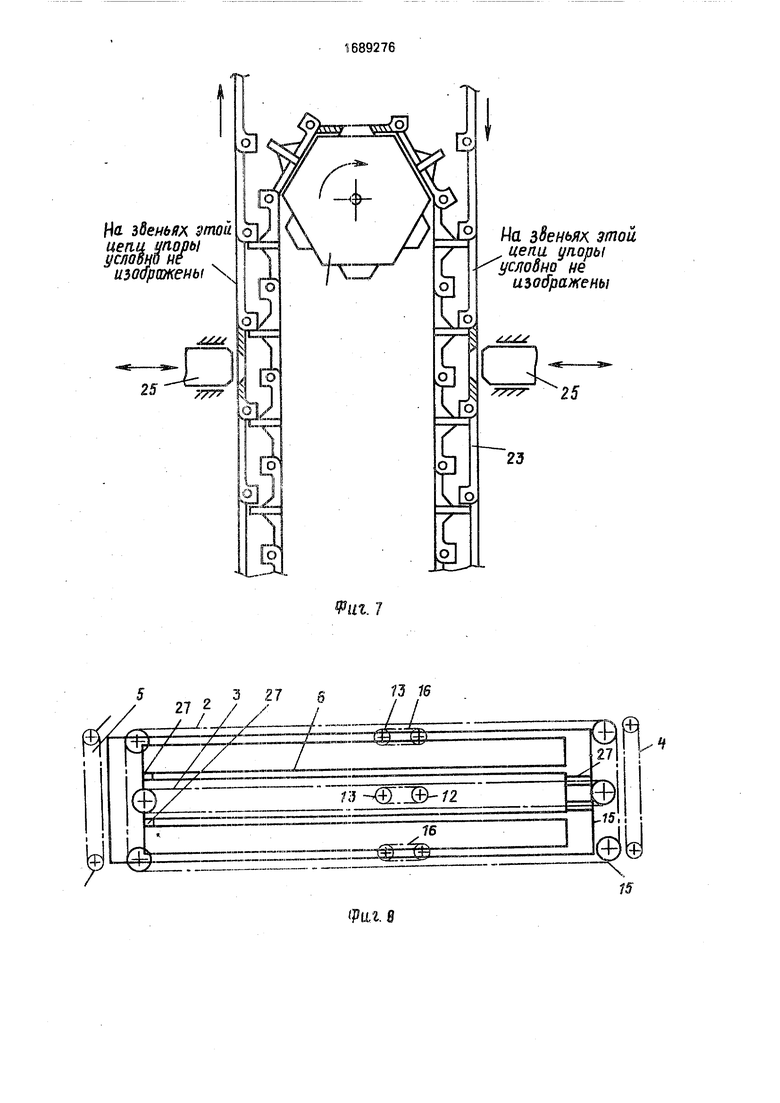
На фиг.1 показан подъемник, вид сбоку; нафиг.2-тоже, вид сверху; на фиг.З -схема остановки грузовой платформы на уровне верхней поверхности карьера; на фиг.4 - грузовая платформа при ее верхнем положении, вид сбоку; на фиг.5 - сечение А-А на фиг.4; на фиг.6 - сечение Б-Б на фиг.4; на фиг.7 - дополнительный привод и фиксаторы для продольного тягового органа, вид сверху; на фиг.8 - схема размещения направляющих основания подъемника, продольных и поперечных тяговых органов, а также дополнительных приводов; на фиг.9 - звено тягового органа, вид сверху, на фиг.10 - то же, вид сбоку; на фиг. 11 - ходовая часть грузовой платформы, вид сверху.
Карьерный подъемник включает в себя грузовые платформы 1, соединенные одна с другой в непрерывную цепь с помощью, например, двух продольных тяговых цепей 2 и 3 и двух поперечных тяговых цепей 4 и 5, которые обеспечивают шаговое перемещение грузовых платформ 1 по прямоугольным металлическим направляющим 6 основания 7 подъемника. Подъемник расположен з наклонной траншее 8, созданной на нерабочем борту карьера, состоящем из нескольких уступов 9. Каждая грузовая платформа 1 опирается через несколько установленных параллельно друг другу колесных пар 10 со сферическими колесами 11 на плоские направляющие 6 основания 7
о со о го VJ о
подъемника и через наклонные штыри 12 и насаженные на них ролики (подшипники) - на упоры 13 звеньев 14 продольных замкну- тыхтяговых цепей 2 иЗ, которые приводятся в движение ведущими звездочками 15 и до- полнительными тяговыми органами в виде гусеничных движителей 16. Продольные 2 и 3 и поперечные 4 и 5 замкнуibie цепи и дополнительные тяговые органы 16 состоят из шарнирно соединенных звеньев 14, на наружной стороне которых имеются упоры 13. Для исключения провисания звеньев Л цепей 2-5 и дополнительных тяговых органов 16 они при движении опираются на ролики 17, закрепленные на основании 7 подъемника. Звенья 14 продольных 2 и 3 и поперечных 4 и 5 цепей и дополнительных тяговых органов 16 выполняются унифицированными и в ппане С-образной формы, на концах - с проушинами 18 для шарнирною соединения их между собой, на наружной стороне средней части - с выступами 13 в качестве упооов, а внутри средней своей части - с выемками 19 доя возможности зацепления с упорами звездочек 15.
На каждом уступе 9 со стороны наклонной траншеи шарнирно установлены подъемные мостики 20 для соединения поверхности уступа 9 с поверхностью грузовой платформы 1 для возможности вьезда на грузовую платформу 1 и съезда с нее горнотранспортного оборудования параллельно борту карьера Верхняя часть основания 7 подъемника поднимается сад верхней поверхностью 21 карьера не менее, чем на высоту одной грузовой платформы. Приводы 22 продольных 2 и 3 и приводы 23 поперечных 4 и 5 цепей с ведущими звездочками 15 размещены на верхней 21 и нижней 24 поверхностях карьера. Дополнительные тяговые органы 16 и фиксаторы 25 размещены в нишах 26 - в местах предыдущего размещения нижней части основания 7 подъемника. Дополнительные тяговые органы 16 (фиг.9), расположенные в нишах 26 ос- нования 7 подъемника ниже продольных цепей 2 и 3, передают рабочее усилие через упоры 13 на своих звеньях 14 на проушины 18 звеньев 14 продольных цепей 2 и 3.
В прямоугольных направляющих 6 ос- нования 7 подъемника находятся внизу две поперечные и вверху две продольные прорези 27, которые перекрываются подвижными плитами 28. В поперечных прорезях 27 при поперечном перемещении нижней грузовой платформы 1. а в продольных прорезях 27 при продольном перемещении верхней грузовой платформы 1 движутся штыри 12 с роликами первой 2 и второй 3 продольных цепей Эти прорези тррекрывзются плитами 28 на период перекатывания по ним сферических колес 11 при продольном перемещении нижних грузовых плат- Форм 1 и при поперечном перемещении верхних i рузовых платформ 1 Упоры 13 могут выполняться не па каждом звене 14. а через несколько звеньев 14.
Фиксагиры 25 (фиг.9) имеют выступающую часть которая при его включении вводится в продольную выемку 19 звена 14. препятствуя этим движению продольных цепей 2 и 3 вверх или вниз, а при выключении фиксаторов 25 их выступающая час(ь выводится из этой выемки 19 звеньев 14. Находящиеся ни одном уровне оузовые платформы могут соединяться между собой перекидным мостом 29
Карьерный ПОДЪРМНИК работает следующим образом.
С поверхности нижнего уступа происходит въезд горнотранспортного оборудования, например одного или двух вагонов, по рельсам с полезным ископаемым на грузовую платформу I, находящуюся на трассе подъема основания 7 подъемника, в это время происходит съезд горнотранспортного оборудования, например порожних вагонов, с грузовой платформы 1, находящейся на трассе спуска основания 7 подъемника, на поверхность нижнего уступа. В этот же период работают поперечные цепи 4 и 5, которые бпагодаря зацеплению своих упоров 13 с горизонтальными итырями 12 самой нижней платформы 1 и самой верхней грузовой платформы 1 перемещают эти платформы с одной трассы на другую. После этого включаются е движение продольные цепи 2 и 3, грузовые платформы 1 благодаря зацеплению их штырей 12 с упорами 13 звеньев 14 этих тяговых органов перемещаются на величину шага, например на высоту однои грузовой платформы.
При очередной остановке подъемника с грузовой платформы 1, находящейся на трассе подьема основания 7 подъемника на уровне верхней поверхности 21 карьера, выполняется съезд (выгрузка) горнотранспортного оборудования, а на расположенную рядом грузовую платформу 1, находящуюся на этом уровне 21 на трассе спуска основания 7 подъемника, происходит в это время t- ьезд (загрузка) горнотранспортного оборудования, например порожних и загруженных одного или двух вагонов или автотранспорта. В это же время с поверхности нижнего уступа с одной стороны происходит въезд горнотранспортного оборудования на грузовую платформу 1, находящуюся на трассе подъема основания 7 подъемника, а с другой стороны - съезд горнотрянспортного
оборудования с грузовой платформы 1, находящейся на трассе спуска основания 7 подъемника, на поверхность нижнего уступа. Одновременно происходит с помощью поперечных тяговых цепей 4 и 5 поперечное перемещение грузовой платформы 1, находящейся в верхнем положении трассы подъема основания 7 подъемника, с этой трассы на соседнюю трассу спуска, и грузовой платформы 1, находящейся в нижнем положении трассы спуска основания 7 подъемника, с этой трассы на соседнюю трассу подъема. Далее производится следующий аналогичный шаг в движении карьерного подъемника и т.д.
Возможность поперечного перемещения грузовых платформ 1 перпендикулярно их продольному перемещению связана с применением колесных пар 10 со сферическими колесами 11. Этим же объясняется прямоугольная форма металлических направляющих 6 основания 7 подъемника.
Загрузка свободной грузовой платформы может производиться не только в указанных нижнем или верхнем их положениях, но и с поверхности любого промежуточного уступа, а выгрузка - соответственно на поверхность любого промежуточного уступа. Для загрузки или выгрузки опускается подъемный мостик 20, соединяющий поверхность уступа 9 с поверхностью грузовой платформы 1. Кроме того, перекидной мост 29 может соединять поверхности двух рядом расположенных грузовых платформ 1, что позволяет через карьерный подъемник переезжать горнотранс портному оборудованию с одной стороны уступа 9 на другую его сторону.
Благодаря продольным цепям 2 и 3 происходит уравновешенное движение поднимаемых и опускаемых масс грузовых платформ 1, вследствие чего энергия приводов 22 этих цепей тратится только на преодоление трения в механизмах и на подъем неуравновешенной части полезного груза, находящегося на грузовых платформах 1.
Формула изобретения
эксплуатационных качеств, направляющие выполнены с вертикально расположенными боковыми поверхностями и верхней горизонтальной поверхностью и установлены в
5 виде прямоугольника, ходовая часть грузовых платформ снабжена взаимодействующими с верхней горизонтальной поверхностью направляющих сферическими колесами и смонтированными в передних частях платформ
0 роликами, выполненными с возможностью вращения вокруг вертикальных осей и расположенными ниже верхней горизонтальной поверхности направляющих, причем тяговый орган подъемника выполнен в виде продоль5 ных и поперечных замкнутых цепей, каждая из которых составлена из шарнирно связанных между собой звеньев, которые содержат упоры, выполненные с возможностью взаимодействия с роликами грузовых платформ.
0 при этом в верхней части направляющих на их поперечной стороне расположены две продольные выемки, а в нижней части направляющих на их боковых сторонах расположены две поперечные выемки, причем все
5 выемки выполнены с возможностью их перекрытия подвижными плитами.
0 со звеньями тягового органа.
5 продольных цепей.
0 упор и выемка.
5 6. Подъемник по п.1, о т л и ч а ю щ и й- с я тем, что на каждом уровне карьера установлен подъемный мост, выполненный с возможностью упора свободным концом в грузовую платформу, причем находящиеся
0 на одном уровне грузовые платформы могут быть соединены между собой перекидным мостом.
9 20
2Ь
23
23 га
Фиг. I
Фиг. 2
Фиг.З
6
Ж
17
7//Y///Y/
)7
Фиг, 6
If
,
ФигЛ
&&
Фиг.5
Б-Б
28 /
S
На З0е//б х этой
цепи упоры условно не
изображены
юх
25
77ГГ
Ма зйеньях. этой „ цепа упоры ус/годно не изображены
7777- 25
23
Фиг. 7
Фиг. в
/5 Ч°ие.//
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
