1
(21)4293297/23-02
(22)03.08.87
(46) 07.07.89. Бюп. № 25
(71)Особое конструкторско-техноло- гическое бюро Орион при Новочеркасском политехническом институте
им. Серго Орджоникидзе
(72)С.И. Гончаров, Н.Д. Паршин и А.Н. Болтышев
(53)666.293(088.8)
(56)Авторское свидетельство СССР № 885350, кп. С 25 D 5/02, 1982.
Авторское свидетельство СССР 1 623907, кл. С 25 D 5/02, 1978.
(54)ЭМАЛИРОВОЧНЫЙ ПОЛУАВТОМАТ С ТЕХНОЛОГИЧЕСКОЙ АДАПТАЦИЕЙ
(57)Изобретение касается эмалирования изделий сложной формы. Цель изобретения - повьшение качества покрытий. Эмалировочный полуавтомат с технологической адаптацией состоит из рабочего органа 1 с регулируемой кинематикой, системы управления 2,
шпинделя 3 с захватами, измерителя свойств шликера 3, запоминакяцего уст- .ройства 6 и функционального блока 7. Обрабатываемое изделие устанавливается в захваты шпинделя 3 рабочего органа 1. Затем в соответствии с программой обработки оно подвергается обливу или окунанию в шликер с последующим силовым воздействием в виде крутильных колебаний различ)1ой интенсивности в двух плоскостях. Автоматический измеритель рабочих свойств шликера 5, установленный в ванне 4, с интервалом 1-2 мин производит измерение плотности шликера, предельного напряжения сдвига и вязкости и в виде электрических сигналов выдает данные в запоминающее устройство 6. Запомненный сигнал поступает в функциональный блок 7, который вьграбатьтает корректирующий сигнал для системы управления 2. При этом рабочий орган с регулируемой кинематикой в сово(Л
4
;о ID
купности с системой управления реализует широкий круг законов движения изделия в пространстве, вращение с переменной угловой скоростью, крутильные рывки в двух плоскостях, высокочастотную вибрацию и др. Конструкция данного полуавтомата позволяет повысить качество покрытий, а также степень автоматизации контроля работы. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для эмалирования изделий | 1979 |
|
SU885350A1 |
| Устройство регулирования системы облива эмалировочной машины | 1980 |
|
SU910844A1 |
| Рабочий орган устройства для эмалирования | 1977 |
|
SU623907A2 |
| Рабочий орган устройства для эмалирования | 1973 |
|
SU537123A1 |
| ЭМАЛЕВЫЙ ШЛИКЕР И СПОСОБ МНОГОСЛОЙНОГО ЭМАЛИРОВАНИЯ | 1993 |
|
RU2111927C1 |
| Копир для управления механизмом поворота рабочего органа эмалировочного полуавтомата | 1973 |
|
SU463754A1 |
| Эмалировочный автомат | 1961 |
|
SU148319A1 |
| Эмалировочный автомат | 1976 |
|
SU615151A1 |
| Многопозиционное устройство для эмалирования посуды | 1977 |
|
SU742487A1 |
| УСТРОЙСТВО ДЛЯ ЭМАЛИРОВАНИЯ ИЗДЕЛИЙ | 1969 |
|
SU254997A1 |
Изобретение касается эмалирования изделий сложной формы. Цель изобретения - повышение качества покрытий. Эмалировочный полуавтомат с технологической адаптацией состоит из рабочего органа 1 с регулируемой кинематикой, системы управления 2, шпинделя 3 с захватами, измерителя свойств шликера 5, запоминающего устройства 6 и функционального блока 7. Обрабатываемое изделие устанавливается в захваты шпинделя 3 рабочего органа 1. Затем в соответствии с программой обработки оно подвергается обливу или окунанию в шликер с последующим силовым воздействием в виде крутильных колебаний различной интенсивности в двух плоскостях. Автоматический измеритель рабочих свойств шликера 5, установленный в ванне 4, с интервалом 1-2 мин производит измерение плотности шликера, предельного напряжения сдвига и вязкости и в виде электрических сигналов выдает данные в запоминающее устройство 6. Запомненный сигнал поступает в функциональный блок 7, который вырабатывает корректирующий сигнал для системы управления 2. При этом рабочий орган с регулируемой кинематикой в совокупности с системой управления реализует широкий круг законов движения изделия в пространстве, вращение с переменной угловой скоростью, крутильные рывки в двух плоскостях, высокочастотную вибрацию и др. Конструкция данного полуавтомата позволяет повысить качество покрытий, а также степень автоматизации контроля работы. 1 ил.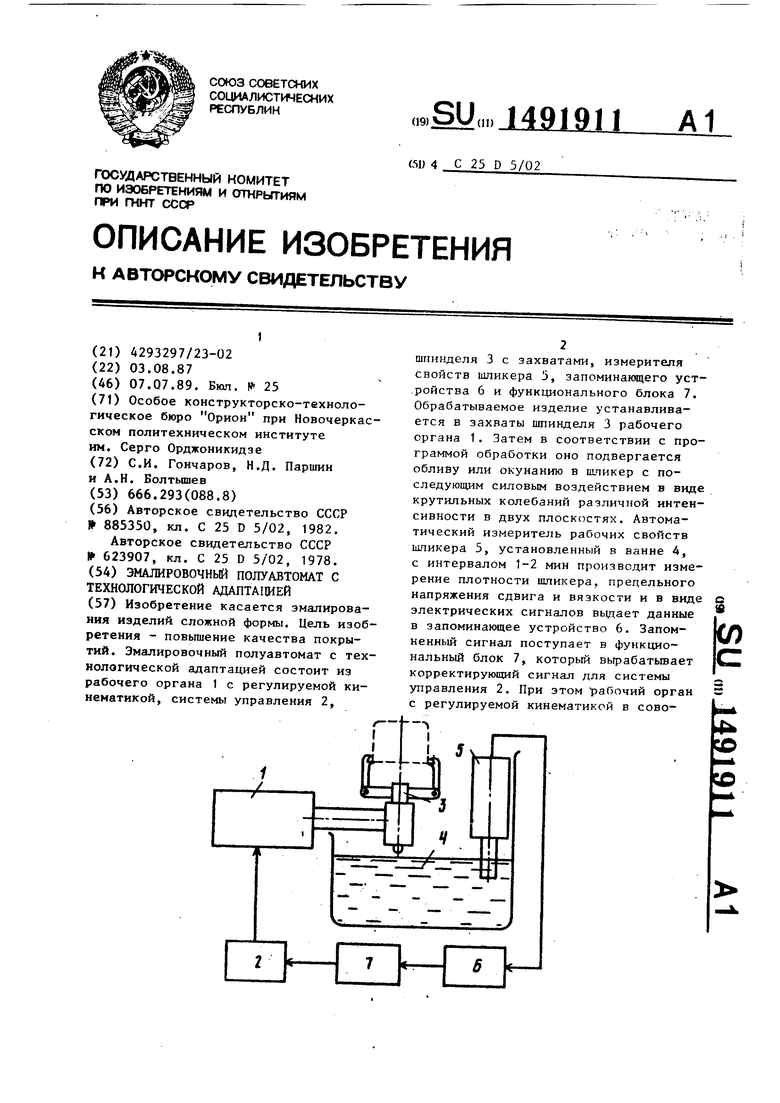
Изобретение относится к области эмалирования, в частности к нанесению эмалевых покрытий на изделие сложной формы.
Целью изобретения является повышение качества покрытий.
На чертеже изображена блок-схема Ьмалировочного полуавтомата.
Полуавтомат включает рабочий орган 1 с регулируемой кинематикой на основе блока электромагнитных порошковых муфт, соединенный с системо 2 управления. Рабочий орган 1 снаб- keH шпинделем 3 с захватами дпя изделия, расположенный над ванной 4, содержащей эмалевый шликер. В ванне Находится измеритель 5 рабочих свойс шликера, присоединенный к входу за- поминакицего устройства 6, связанного с функциональным блоком 7. Последний соединен с системой 2 управления.
Полуавтомат работает следующим- образом.
Обрабатываемое изделие устанавли- дается в захваты шпинделя 3 рабочего Ьргана 1, Далее в соответствии с про Ьрамной o6pa6oTigi изделие подвергается обливу или окунанию в шликер с Последующим силовым воздействием в виде крутильных движений различной интенсивности и длительности по двум взаимно перпендикулярным осям. Характер воздействия подбирается экспериментальным путем для каждого ви- Да изделий «сходя из условий равномерного распределения шликера по поверхности.
Измеритель 5 рабочих свойств шликера, установленный в ванне 4, перио дически (с интервалом 1-2 мин) производит измерение плотности шликера, предельного напряжения сдвига и вязкости и в виде электрических сигналов вьщает эти данные в запоминающее устройство 6, которое сохраняет информацию о свойствах шликера в паузах между измерениями. Запомненный сигнал поступает далее на функцио-
5
0
5
0
j О 5
нальный блок 7, который вырабатьюает корректирующий сигнал для системы 2 управления. В результате при изменении рабочих свойств шликера от разных факторов (времени, температуры, влагосодержания и т.п.) производится корректировка программы режима нанесения путем изменения интенсивности и относительной длительности отдельных фаз обработки.
Рабочий орган с регулируемой кинематикой в совокупности с системой управления реализует широкий круг законов движения изделия в пространстве: вращение с переменной угловой скоростью, крутильные рывки в двух плоскостях, высокочастотную вибрацию. В случае выхода параметров шликера за допустимые пределы функциональный блок может остановить работу полуавтомата и включить сигнализацию.
Конструкция полуавтомата с технологической адаптацией позволяет повысить качество изделий при механизированном нанесении стеклоэмалевого покрытия, а также повысить степень автоматизации процесса за счет ликвидации потребности в непрерывном визуальном контроле работы полуавтомата.
Формула изобретения
Эмалировочньй полуавтомат-с технологической адаптацией, содержащий рабочий орган с механизмами регули- . рования кинематики, систему управления и ванну для шликера, отличающийся тем, что, с целью Повышения качества покрытия, он снабжен автоматическим измерителем рабочих свойств шликера, установленным в ванне, запоминашцим устройством и функциональным блоком, причем выход автоматического измерителя подключен к входу запоминающего устройства, выход которого соединен с входом фун- кционального блока, а выход последнего - с входом системы управления.
