(Л
ческш рычаг, состоящш из внутренней и выдв1 жной наружной секций 10 и 11. Торец штока 6 соединен с гибкой тягой 9. Глубину погружения устр-ва Определяют по шкале на направляющей трубе П. Врапением барабана 18 натягивают тягу 9. Толкатель 7 со штоком 6 подтягиваются вверх и во: действуют через распорное звено 13 на телескопический рычаг. Последний движется вверх до соприкосновения со стенкой П. Касание фиксируется датчиком 15, При отсутствии касания подтягивание штока 6 продолжается. Толкатель 7
Продолжает воздействовать на выдвижнук. наружную секцию И распорным звеном 13. Секция 11 выдвигается по горизонта- Ли до соприкосновения датчика 15 со стенкой П. Расстояние от оси скважины до стенки П определяют по линейному перемещению тяги 9. Измерительный механизм перемещают по вертикали
посредством трубы 1. В исходном состоянии телескопический рычаг опущен за счет ослабления тяги 9 и действия пружин. Устр-во может быть использовано в щироком диапазоне размеров
полостей. 1 з.п. ф-лы, 3 ил.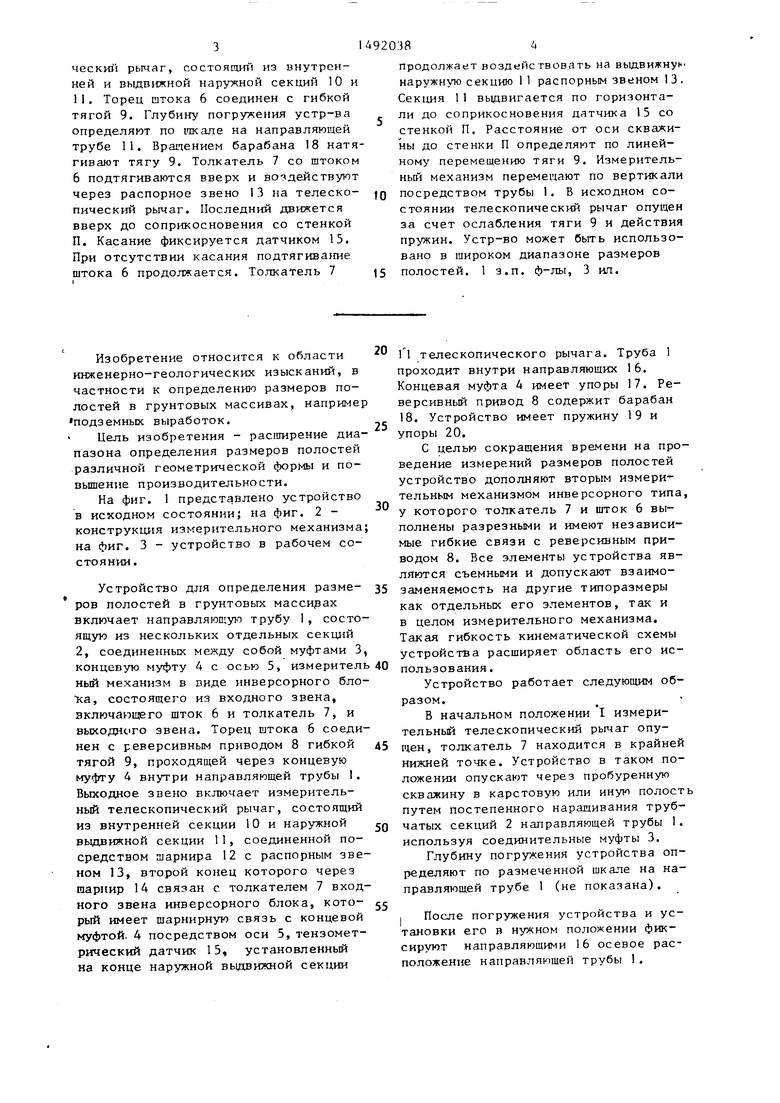
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Устройство для определения размеров полости в грунтовом массиве | 1979 |
|
SU889847A1 |
| ЗОНТ | 2003 |
|
RU2234845C2 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| Профилемер | 1978 |
|
SU840322A1 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
Изобретение относится к горному делу. Цель - расширение диапазона определения размеров полостей (П) различной геометрической формы. Устройство содержит направляющую трубу 1, реверсивный привод 8 с барабаном 18 и гибкой тягой 9, измерительный механизм с датчиком 15. Измерительный механизм включает распорное звено 13, входное звено, состоящее из толкателя 7 со штоком 6, и выходное звено. Последнее включает измерительный телескопический рычаг, состоящий из внутренней и выдвижной наружной секций 10 и 11. Торец штока 6 соединен с гибкой тягой 9. Глубину погружения устройства определяют по шкале на направляющей трубе 1. Вращением барабана 18 натягивают тягу 9. Толкатель 7 со штоком 6 подтягиваются вверх и воздействуют через распорное звено 13 на телескопический рычаг. Последний движется вверх до соприкосновения со стенкой П. Касание фиксируется датчиком 15. При отсутствии касания подтягивание штока 6 продолжается. Толкатель 7 продолжает воздействовать на выдвижную наружную секцию 11 распорным звеном 13. Секция 11 выдвигается по горизонтали до соприкосновения датчика 15 со стенкой П. Расстояние от оси скважины до стенки П определяют по линейному перемещению тяги 9. Измерительный механизм перемещают по вертикали посредством трубы 1. В исходном состоянии телескопический рычаг опущен за счет ослабления тяги 9 и действия пружин. Устройство может быть использовано в широком диапазоне размеров полостей. 1 з.п.ф-лы, 3 ил.
Изобретение относится к области инженерно-геологических изысканий, в частности к определению размеров полостей в грунтовых массивах, например подземных выработок.
Цель изобретения - расширение диапазона определения размеров полостей различной геометрической формы и повышение производительности.
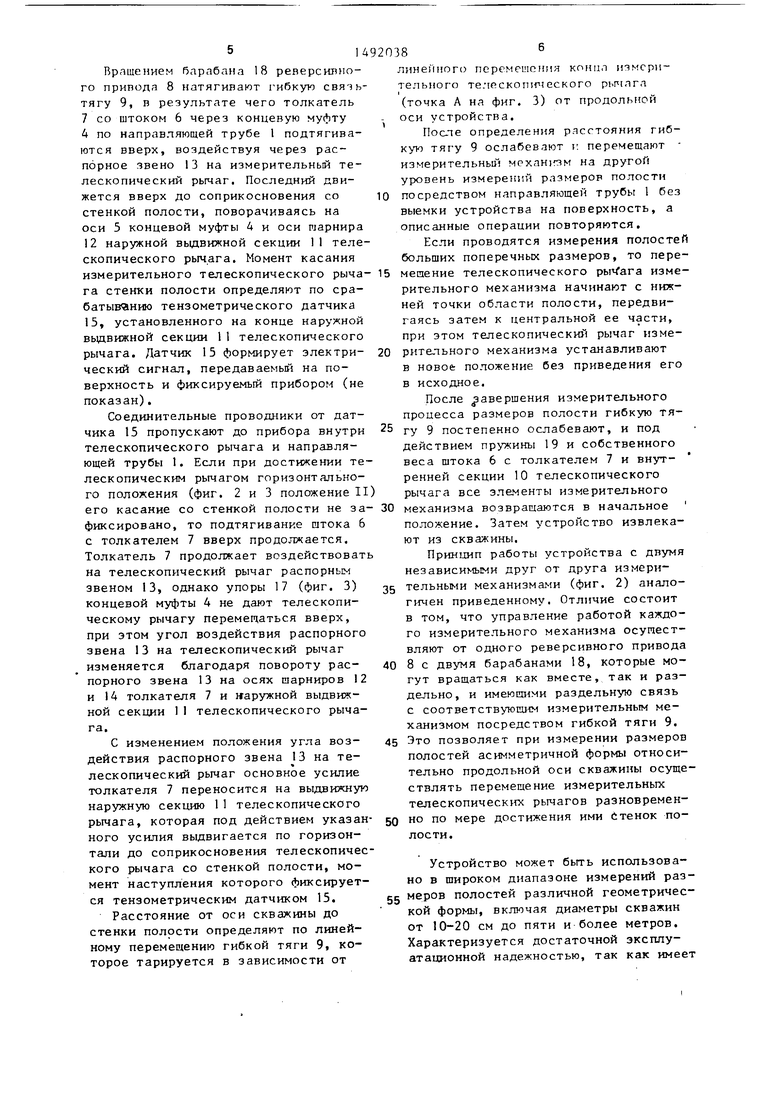
На фиг. 1 представлено устройство в исходном состоянии; на фиг. 2 - конструкция измерительного механизма; на фиг. 3 - устройство в рабочем состоянии.
Устройство для определения разме- ров полостей в грунтовых массирах включает направляющую трубу 1, состоящую из нескольких отдельных секций 2, соединенных между собой муфтами 3 концевую муфту 4 с осью 5, измеритель ный механизм в виде инверсорного бло- ка, состоящего из входного звена, зключаьэщчего шток 6 и толкатель 7, и выходного звена. Торец щтока 6 соединен с реверсивным приводом 8 гибкой тягой 9, проходящей через концевую муфту 4 внутри направляющей трубы 1. Выходное звено включает измерительный телескопический рычаг, состоящий из внутренней секции 10 и наружной выдвижной секции 11, соединенной посредством иарнира 12 с распорным звеном 13, второй конец которого через шарнир 14 связан с толкателем 7 входного звена инверсорного блока, кото- рый имеет шарнирную связь с концевой муфтой. 4 посредством оси 5,тензомет- рический датчик 15, установленный на конце наружной выдвижной секции
0
5
0
5 0 З
11 телескопического рычага. Труба 1 проходит внутри направляющих 16. Концевая муфта 4 имеет упоры 17. Ре- версивньй привод 8 содержит барабан 18. Устройство имеет пружину 19 и упоры 20.
С целью сокращения времени на проведение измерений размеров полостей устройство дополняют вторым измерительным механизмом инверсорного типа, у которого толкатель 7 и шток 6 выполнены разрезными и имеют независимые гибкие связи с реверсивным приводом 8. Все элементы устройства являются съемными и допускают взаимозаменяемость на другие типоразмеры как отдельных его элементов, так и в целом измерительного механизма. Такая гибкость кинематической схемы устройства расширяет область его использования.
Устройство работает следующим образом.
В начальном положении l измери- тельньй телескопический рычаг опущен, толкатель 7 находится в крайней нижней точке. Устройство в таком положении опускают через пробуренную скважину в карстовую или иную полость путем постепенного наращивания трубчатых секций 2 направляющей трубы 1. используя соединительные муфты 3.
Глубину погружения устройства определяют по размеченной шкале на направляющей трубе 1 (не показана).
I После погружения устройства и установки его в нужном положении фиксируют направляющими 16 осевое расположение направляющей трубы 1.
Вращением барабана 18 реверсивного привода 8 натягивают гибкую свять- тягу 9, в результате чего толкатель 7 со штоком 6 через концевую муЛту 4 по направляющей трубе I подтягиваются вверх, воздействуя через распорное звено 13 на измерительный телескопический рычаг. Последний движется вверх до соприкосновения со стенкой полости, поворачиваясь на оси 5 концевой муфты 4 и оси шарнира 12 наружной выдвижной секции 11 телескопического рычага. Момент касания
измерительного телескопического рыча- 15 мешение телескопического измега стенки полости определяют по сра- батыв анию тензометрического датчика 15, установленного на конце наружной вьдвижной секции 11 телескопического рычага. Датчик 15 формирует электрический сигнал, передаваемый на поверхность и фиксируемый прибором (не показан).
Соединительные проводники от датчика 15 пропускают до прибора внутри телескопического рычага и направляющей трубы 1, Если при достижении телескопическим рычагом горизонтального положения (фиг. 2 и 3 положение II его касание со стенкой полости не зафиксировано, то подтягивание штока 6 с толкателем 7 вверх продолжается. Толкатель 7 продолжает воздействовать на телескопический рычаг распорным звеном 13, однако упоры 17 (фиг. 3) концевой муфты 4 не дают телескопическому рычагу перемегдаться вверх, при этом угол воздействия распорного звена 13 на телескопический рычаг изменяется благодаря повороту распорного звена 13 на осях шарниров 12 и 14 толкателя 7 и наружной выдвижной секции 11 телескопического рычага.
С изменением положения угла воздействия распорного звена 13 на те
лескопический рычаг основное усилие толкателя 7 переносится на выдвижную наружную секцию 11 телескопического рычага, которая под действием указанного усилия выдвигается по горизонтали до соприкосновения телескопического рычага со стенкой полости, момент наступления которого фиксируется тензометрическим датчиком 15. Расстояние от оси скважины до стенки полости определяют по линейному перемещению гибкой тяги 9, которое тарируется в зависимости от
линейного персмешонмя конил измерительного те.ческогигческого рьпшга (точка А на фиг. 3) от продольной оси устройства.
После определения расстояния гибкую тягу 9 ослабевают i; перемещают - измерительный мехаН1гзм на другой уровень измерений размеров полости посредством направляющей трубы 1 без выемки устройства на поверхность, а описанные операции повторяются.
Если проводятся измерения полостей больших поперечньк размеров, то перерительного механизма начинают с нижней точки области полости, передвигаясь затем к центральной ее части, при этом телескопический рычаг измерительного механизма устанавливают в новое положение без приведения его в исходное.
После завершения измерительного процесса размеров полости гибкую тяру 9 постепенно ослабевают, и под действием пружины 19 и собственного веса штока 6 с толкателем 7 и внутренней секции 10 телескопического рычага все элементы измерительного
механизма возвращаются в начальное положение. Затем устройство извлекают из скважины.
Принцип работы устройства с двумя независимыми друг от друга измерительными механизмами (фиг. 2) аналогичен приведенному. Отличие состоит в том, что управление работой каждого измерительного механизма осуществляют от одного реверсивного привода
8 с двумя барабанами 18, которые могут вращаться как вместе, так и раздельно, и имеющими раздельную связь с соответствующим измерительным механизмом посредством гибкой тяги 9.
Это позволяет при измерении размеров полостей асимметричной формы относительно продольной оси скважины осуществлять перемещение измерительных телескопических рычагов разновременно по мере достижения ими йтенок полости.
Устройство может быть использовано в широком диапазоне измерений раз- меров полостей различной геометрической формы, включая диаметры скважин от 10-20 см до пяти и более метров. Характеризуется достаточной эксплуатационной надежностью, так как имеет
простую кинематическую схему при сохранении точности измерений.
Формула изобретения
0
5
0
5
ходного звена, включаюир.го измерительный телескопический рычаг, состоящий из шарнирно соединенной с муфтой внутренней и выдвижной наружной секций, причем наружная секция соединена посредством шарнира и распорного звена с толкателем входного звена, причем датчик установлен на торце наружной выдвижной секции.
Фиг.2
Корректор М. Шароши
| Устройство для определения размеров полости в грунтовом массиве | 1979 |
|
SU889847A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
