гй IS
Фиг. 2
Изобретение относится к машиностроению и может быть использовано в роботизированных комплексах, гибких автоматизированных производственных системах (ГАПС), в складском хозяйстве.
Цель изобретения - снижение энергоемкости.
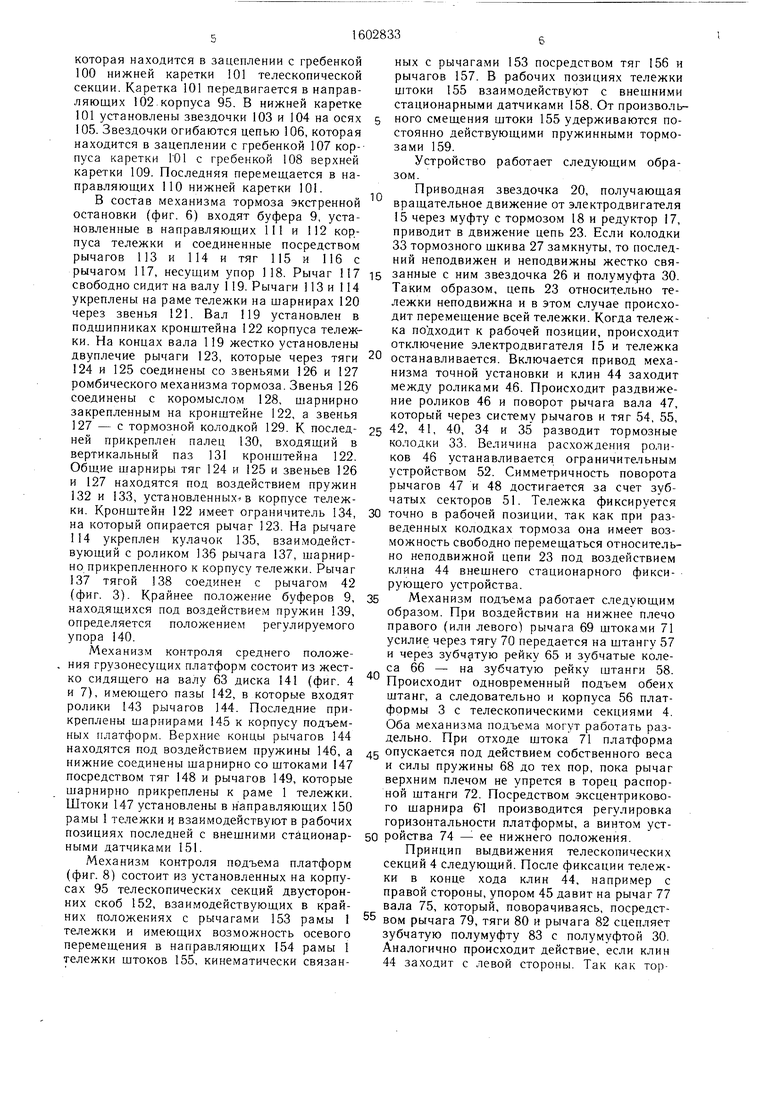
На фиг. 1 изображена транспортная ро- бототележка, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - кинематическая схема механизмов передвижения тележки, точной установки и часть механизма выдвижения телескопических секций грузонесущих платформ; на фиг. 4 - механизм подъема груза и часть механизма контроля положения телескопических секций; на фиг. 5 - механизм выдвижения телескопических секций; на фиг. 6 - механизм тормоза экстренной остановки тележки; на фиг. 7 - механизм контроля среднего положения грузонесущих платформ; на фиг. 8 - механизм контроля подъема платформ.
Устройство (фиг. 1) содержит тележку с рамой 1, установленной на бегунках 2. На раме 1 расположены грузонесущие платформы 3, имеющие каждая пару телескопических выдвижных секций 4, на которые установлены спутники с грузами 5. На раме тележки также размещены механизм 6 передвижения тележки, механизмы 7 подъема платформы, механизм 8 точной установки, буфера 9, связанные с,механизмом 10 экстренного торможения и рычагами 11 ручного передвижения, предохранительные щиты 12 и механизмы 13 контроля положения телескопических секций. Тележка передвигается по рельсам 14.
Механизм передвижения состоит из приводной станции, включающей в себя стационарно установленный электродвигатель 15 (фиг. 3), соединенный с входным валом 16 редуктора 17 посредством муфты с тормозом 18. На выходном валу 19 редуктора 17 насажена приводная звездочка 20. Приводная станция установлена стационарно вне тележки. Таким же образом установлена натяжная станция, включающая в себя натяжную звездочку 21, соединенную с натяжным устройством 22. Бесконечная цепь 23 огибает приводную звездочку 20, натяжную звездочку 21, обводные звездочки 24, укрепленные на раме 1 тележки на подшипниках 25, и звездочку 26. Последняя и тормозной шкив 27 установлены свободно на входном валу 28 редуктора 29 и жестко соединены между собой и с полумуфтой 30 полым валом 31. Входной вал 28 укреплен на корпусе тележки в подшипнике 32. Тормозной шкив 27 охвачен тормозными колодками 33, укрепленными на рычагах 34 и 35, соединенных между собой шарнирно штоками 36 и 37 и регулировочной муфтой 38, которая расположена в направляющих 39. Противоположные концы рычагов 34 и 35 также соединены шарнирно тягами 40 и 41 с рычагом
42, укрепленным на раме 1 тележки в шарнире 43.
Механизм точной установки (фиг. 3) состоит из внещнего клина 44 с упором 45. Клин 44 имеет внешний стационарный привод (не приведен). Направляющие ролики 46, между которыми заходит клин 44, укреплены на рычагах валов 47 и 48, установленных в подщипниках 49 рамы 1 тележки. Валы 47 и 48 соединены между собой пружинами 50, зубчатыми секторами 51 и упорным устройством 52 с регулирующим винтом 53. Рычаг 54 вала 47 соединен тягой 55 с рычагом 42.
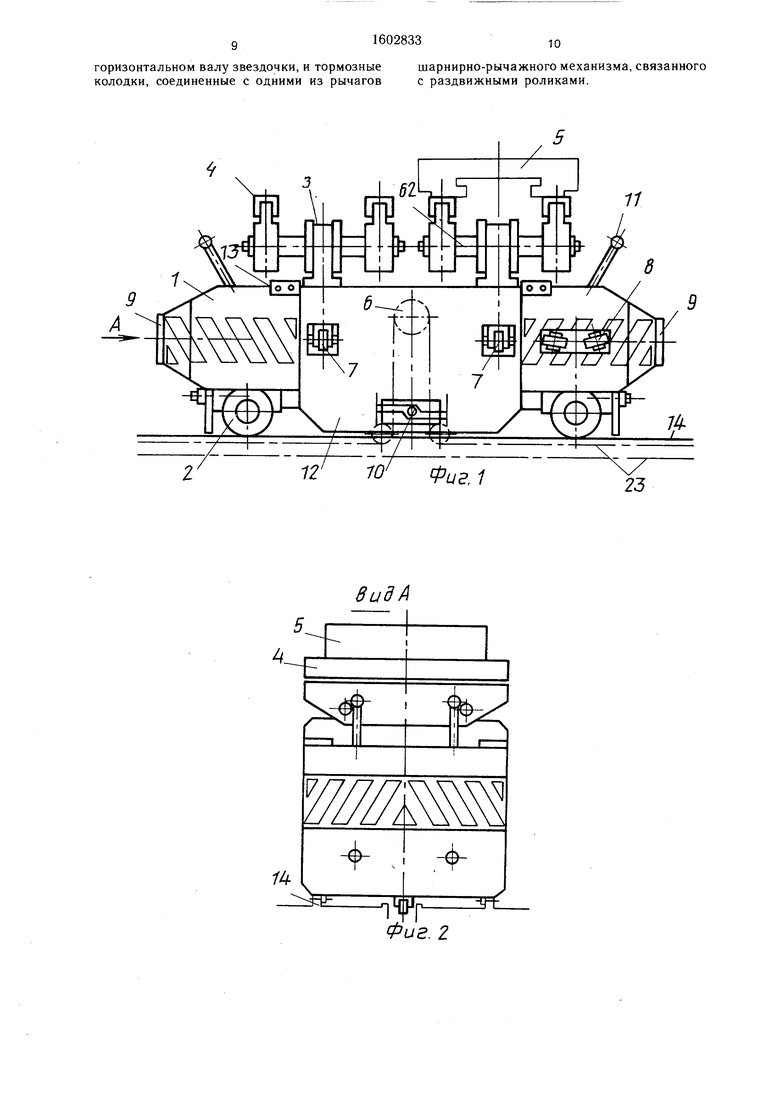
Механизм подъема Сфиг. 4) состоит из 5 корпуса 56, укрепленного на штангах 57 и 58 в щарнирах 59-61. Через корпус 56 проходят несущие щтанги 62, на концах которых крепятся телескопические выдвижные секции 4. В корпусе установлен также вал 63, передающий движение от редуктора 0 29 (фиг. 3) к телескопическим выдвижным секциям (фиг. 5) и к механизмам контроля среднего положения телескопических выдвижных секций (фиг. 7). Штанги 57 и 58 перемещаются в направляющих 64 рамы 1 тележки. На штангах 57 и 58 нарезаны зубчатые рейки 65, находящиеся в зацеплении со сцепленными между собой зубчатыми колесами 66, укрепленными в корпусе тележки на осях 67 и стянутыми между собой пружиной 68. Штанги 57 и 58 соединены 30 с боковым плечом рычагов, 69 через тяги 70. Рычаги 69 щарнирно укреплены на раме 1 тележки. Нижние плечи рычагов 69 в рабочих позициях тележки взаимодействуют с одним из штоков 71 внешних стационарных приводов механизма подъема. Верхние плечи 35 рычагов 69 упираются в торцы распорной штанги 72, установленной в направляющих 73 корпуса тележки. Длина штанги регулируется винтовым устройством 74.
Механизм включения муфты перемещений телескопических секций 4 платформ 0 (фиг. 3) состоит из валов 75 и 76 с рычагами 77-79. Рычаги 78 и 79 тягами 80 и 81 соединены с рычагом 82 зубчатой полумуфты 83 через пружины 84, ограничивающие усилие прижатия полумуфты 83 к полу- 45 муфте 30. На выходном валу 85 редуктора 29 жестко насажена звездочка 86, которая соединена цепью 87 со звездочкой 88, установленной жестко на валу 89. Последний установлен в подщипниках головки штанги 90, шарнирно опертой на вал 85 редуктора 50 29 и подвешенной к валу 63 на жесткой тяге 91, а звездочка 92 соединена цепью 93 со звездочкой 94 (фиг. 5).
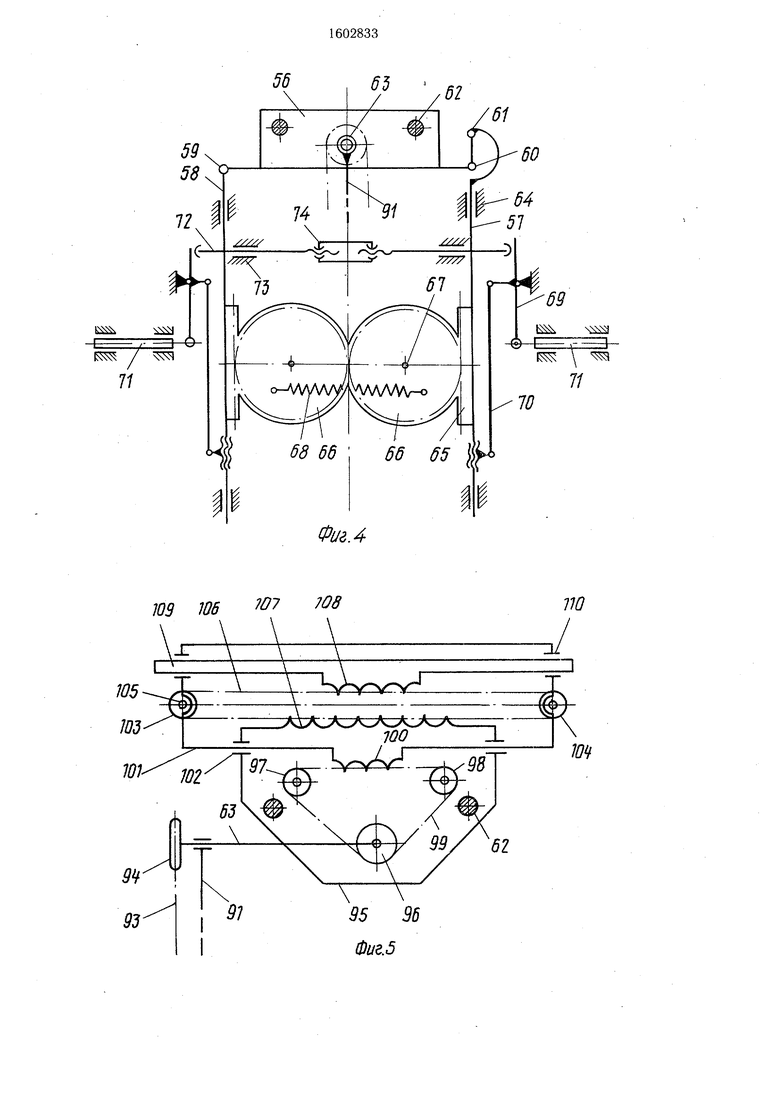
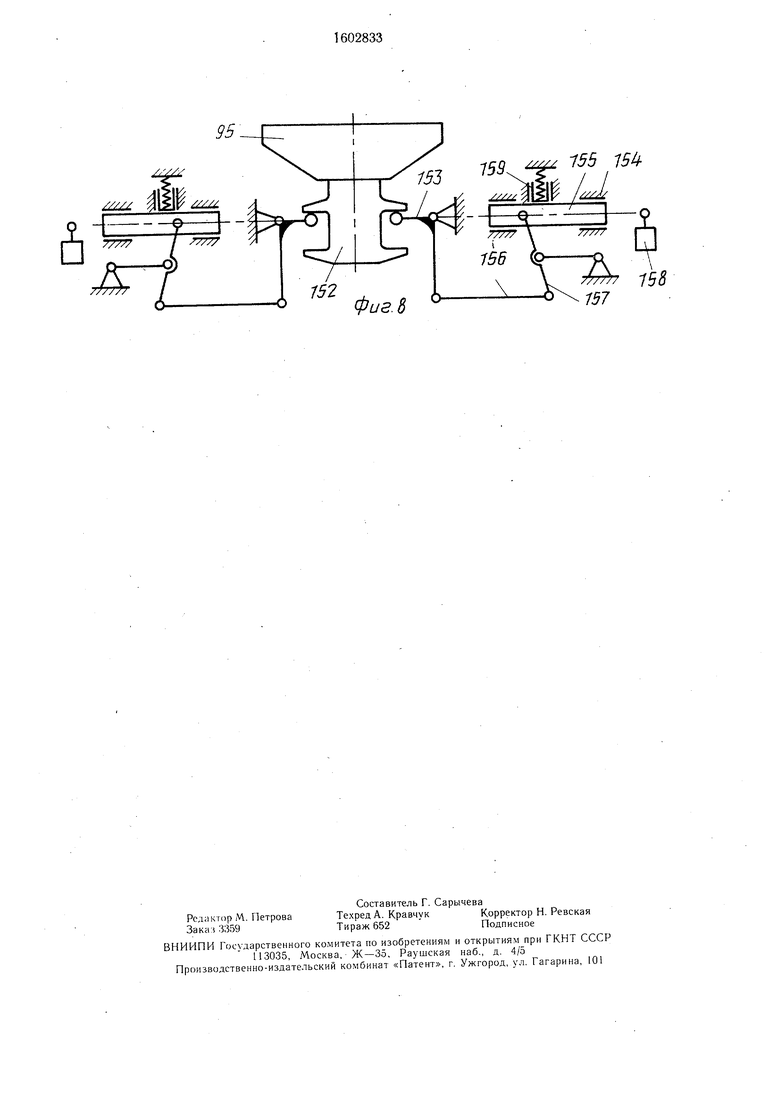
Устройство механизма выдвижения телескопических секций следующее. Корпуса 95 каждой телескопической секции насажены 55 на несущие щтанги 62 (фиг. 1 и 5). В корпусе 95 установлена звездочка 96, жестко соединенная с валом 63, и звездочки 97 и 98. Звездочки 96-98 огибаются цепью 99,
которая находится в зацеплении с гребенкой
100нижней каретки 101 телескопической секции. Каретка 101 передвигается в направляющих 102.корпуса 95. В нижней каретке
101установлены звездочки 103 и 104 на осях 105. Звездочки огибаются цепью 106, которая находится в зацеплении с гребенкой 107 корпуса каретки I Ol с гребенкой 108 верхней каретки 109. Последняя перемещается в направляющих ПО нижней каретки 101.
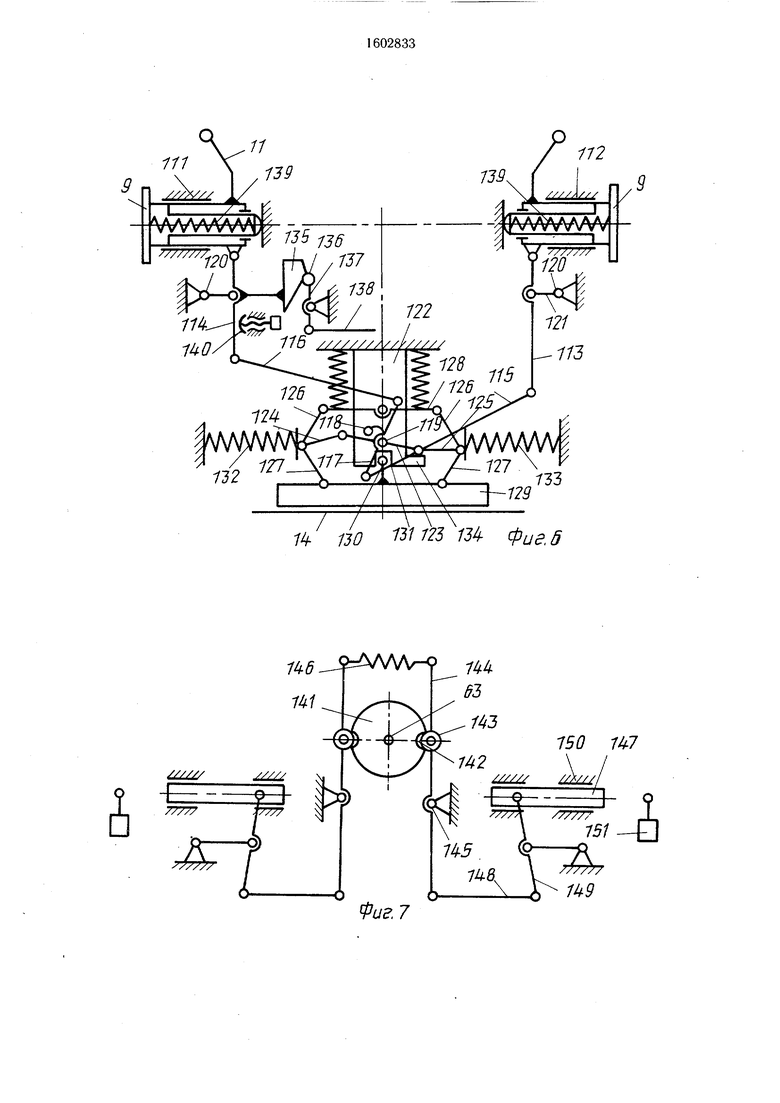
В состав механизма тормоза экстренной остановки (фиг. 6) входят буфера 9, установленные в направляющих 111 и 112 корпуса тележки и соединенные посредством рычагов 113 и 114 и тяг 115 и 116 с рычагом 117, несущим упор 118. Рычаг 117 свободно сидит на валу 119. Рычаги 113 и 114 укреплены на раме тележки на щарнирах 120 через звенья 121. Вал 119 установлен в подщипниках кронщтейна 122 корпуса тележки. На концах вала 119 жестко установлены двуплечие рычаги 123, которые через тяги 124 и 125 соединены со звеньями 126 и 127 ромбического механизма тормоза. Звенья 126 соединены с коромыслом 128, шарнирно закрепленным на кронштейне 122, а звенья 127 - с тормозной колодкой 129. К последней прикреплен палец 130, входящий в вертикальный паз 131 кронщтейна 122. Общие щарниры тяг 124 и 125 и звеньев 126 и 127 находятся под воздействием пружин 132 и 133, установленных в корпусе тележки. Кронщтейн 122 имеет ограничитель 134, на который опирается рычаг 123. На рычаге 114 укреплен кулачок 135, взаимодействующий с роликом 136 рычага 137, щарнир- но прикрепленного к корпусу тележки. Рычаг 137 тягой 138 соединен с рычагом 42 (фиг. 3). Крайнее положение буферов 9, находящихся под воздействием пружин 139, определяется положением регулируемого упора 140.
Механизм контроля среднего положе- ния грузонесущих платформ состоит из жестко сидящего на валу 63 диска 141 (фиг. 4 и 7), имеющего пазы 142, в которые входят ролики 143 рычагов 144. Последние прикреплены шарнирами 145 к корпусу подъемных платформ. Верхние концы рычагов 144 находятся под воздействием пружины 146, а нижние соединены щарнирно со щтоками 147 посредством тяг 148 и рычагов 149, которые щарнирно прикреплены к раме 1 тележки. Штоки 147 установлены в направляющих 150 рамы тележки и взаимодействуют в рабочих позициях последней с внещними стационарными датчиками 151.
Механизм контроля подъема платформ (фиг. 8) состоит из установленных на корпусах 95 телескопических секций двусторонних скоб 152, взаимодействующих в крайних положениях с рычагами 153 рамы 1 тележки и имеющих возможность осевого перемещения в направляющих 154 рамы 1 ележки щтоков 155, кинематически связан10
ных с рычагами 153 посредством тяг 156 и рычагов 157. В рабочих позициях тележки щтоки 155 взаимодействуют с внещними стационарными датчиками 158. От произволь- 5 ного смещения щтоки 155 удерживаются постоянно действующими пружинными тормозами 159.
Устройство работает следующим образом.
Приводная звездочка 20, получающая вращательное движение от электродвигателя 15 через муфту с тормозом 18 и редуктор 17, приводит в движение цепь 23. Если колодки 33 тормозного щкива 27 замкнуты, то последний неподвижен и неподвижны жестко свя- Т5 занные с ним звездочка 26 и полумуфта 30. Таким образом, цепь 23 относительно тележки неподвижна и в этом случае происходит перемещение всей тележки. Когда тележка подходит к рабочей позиции, происходит отключение электродвигателя 15 и тележка 0 останавливается. Включается привод механизма точной установки и клин 44 заходит между роликами 46. Происходит раздвиже- ние роликов 46 и поворот рычага вала 47, который через систему рычагов и тяг 54, 55, 5 42, 41, 40, 34 и 35 разводит тормозные колодки 33. Величина расхождения роликов 46 устанавливается ограничительным устройством 52. Симметричность поворота рычагов 47 и 48 достигается за счет зубчатых секторов 51. Тележка фиксируется 0 точно в рабочей позиции, так как при разведенных колодках тормоза она имеет возможность свободно перемещаться относительно неподвижной цепи 23 под воздействием клина 44 внещнего стационарного фикси- рующего устройства.
5 Механизм подъема работает следующим образом. При воздействии на нижнее плечо правого (или левого) рычага 69 щтоками 71 усилие через тягу 70 передается на щтангу 57 и через зубчатую рейку 65 и зубчатые колеса 66 - на зубчатую рейку щтанги 58. Происходит одновременный подъем обеих штанг, а следовательно и корпуса 56 платформы 3 с телескопическими секциями 4. Оба механизма подъема могут работать раздельно. При отходе щтока 71 платформа 5 опускается под действием собственного веса и силы пружины 68 до тех пор, пока рычаг верхним плечом не упрется в торец распорной щтанги 72. Посредством эксцентрикового щарнира 61 производится регулировка горизонтальности платформы, а винтом уст- 0 ройства 74 - ее нижнего положения.
Принцип выдвижения телескопических секций 4 следующий. После фиксации тележки в конце хода клин 44, например с правой стороны, упором 45 давит на рычаг 77 вала 75, который, поворачиваясь, посредст- 5 вом рычага 79, тяги 80 и рычага 82 сцепляет зубчатую полумуфту 83 с полумуфтой 30. Аналогично происходит действие, если клин 44 заходит с левой стороны. Так как тор0
мозные колодки 33 уже отключены от тормозного шкива 27, то при включении электродвигателя 15 движение от цепи 23 пере дается на звездочку 26, полый вал 31 и через зубчатую муфту 30, 83 - на входной вал 28 редуктора 29. От выходного вала 85 движение через звездочки 86, 88 и 92, 94 передается валу 63. Вращательное движение последнего посредством замкнутой цепи 99, находящейся в постоянном зацеплении со звездочкой 96 и гребенкой 100, преобразуется в поступательное движение каретки 101, которая перемещается по направляющим 102 корпуса 95. Перемещаясь, каретка 101 приводит в движение цепь 106, которая находится одновременно в зацеплении с неподвижной гребенкой 107 корпуса 95 и гребенкой 108 верхней каретки 109. Цепь 106 перемещает верхнюю каретку 109 по направляющим ПО нижней каретки 101 в направлении перемещения последней.
Механизм экстренной остановки действует следующим образом. При наезде тележки одним из буферов 9 на препятствие происходит их сжатие. Движение буферов 9 передается рычагам 113 и 114, которые, поворачиваясь, через тяги 115 и 116 поворачивают рычаг 117. Сначала рычаг 117 вращается вхолостую. В это время кулачок 135, воздействуя на ролик 136, поворачивает рычаг 137, который через тяги 138 поворачивает рычаг 42 и отключает колодки 33 тормозного шкива 27. Тележка отключается от приводной цепи, сообщавшей ей продольное перемещение. Если тележка не останавливается, то происходит дальнейшее сжатие буферов и, следовательно, дальнейший поворот рычага 117. Последний упором 118 воздействует на левое плечо рычага 123 тормоза экстренной остановки, находящегося во взведеном состоянии. Рычаг 123 поворачивается против часовой стрелки, рычажная система тормоза выходит из равнозесия и пружины 132 и 133 через ромбическую рычажную систему прижимают тормозную колодку 129 к рельсам 14. Тормозное усилие, действующее на колодку 129, передается на корпус тележки через палец 130, который находится в пазу 131 кронштейна 122 корпуса тележки.
Механизм контроля среднего положения платформы работает следующим образом. При повороте вала 63 жестко связанный с ним диск 141 выталкивает ролики 143 рычагов 144 из пазов 142, преодолевая действие пружины 146. Рычаги 144 поворачиваются вокруг шарниров 145 и через тяги 148 и рычаги 149 выдвигают штоки 147, которые воздействуют на расположенные в рабочих позициях стационарные датчики, выдающие сигнал о смещении платформ. При возврате выдвижных платформ в среднее положение механизм контроля под действием пружины 146 возвращается в исходное положение. Ролики заскакивают в вырезы диска.
фиксируя платформы в их среднем положении. Внешние датчики выключаются.
Механизм контроля подъема имеет примерно такое же действие. При подъеме
платформы происходит подъем скобы 152, которая в верхнем положении воздействует на рычаг 153 и через тяги 156 и рычаги 157 выдвигает потоки 155. Штоки включают внещние датчики 158, которые дают сигнал о подъеме платформ.
При опускании платформ происходит возвращение механизма в исходное положение и выключение датчиков.
Формула изобретения
1. Перегрузочное устройство, содержащее тележку, привод перемещения последней, включающий в себя гибкий орган, соединенный с рамой тележки и стационарно установленным на основании двигателем 0 и огибающий размещенные по концам пути перемещения тележки приводные и натяжные элементы, расположенную на тележке и связанную с механизмом вертикального перемещения платформу, на которой установлен С телескопический захват, и механизм позиционирования тележки на позициях перегрузки, отличающееся тем, что, с целью снижения энергоемкости, на раме тележки посредством горизонтального вала, размещенного перпендикулярно продольной ее оси, смонтиро- 0 вана звездочка, связанная через установленные на упомянутом горизонтальном валу сцепную муфту и нормально замкнутый тормоз с механизмом выдвижения телескопического захвата, механизм позиционирования содержит попарно размещеннь е в 35 горизонтальной плоскости на каждой из боковых сторон рамы тележки раздвижные подпружиненные ролики и смонтированные на каждой позиции перегрузки выдвижные в направлении боковых сторон тележки штыри, имеющие клиновые поверхности для контактирования с упомянутыми роликами, которые посредством шарнирно-рычаж- ного механизма кинематически связаны с упомянутым тормозом, на штырях смонтированы упоры, а на раме тележки - рычаги, 45 размещенные с возможностью взаимодействия с последними и кинематически соединенные со сцепной муфтой, при этом механизм подъема платформы содержит установленные на каждой позиции перегрузки и размещенные с боковых сторон рамы под- 50 вижные в сторону этих сторон последней щтоки и закрепленные на этой раме соответственно штокам шарнирно-рычажные ме- низмы, одни рычаги которых размещены с возможностью контактирования со штоками, а другие кинематически соединены посред- 55 ством подвижных з вертикальном направлении штанг с платформой.
2. Устройство по п. 1, отличающееся тем, , что тормоз содержит шкив, закрепленный на
горизонтальном валу звездочки, и тормозныешарнирно-рычажного механизма, связанного
колодки, соединенные с одними из рычаговс раздвижными роликами.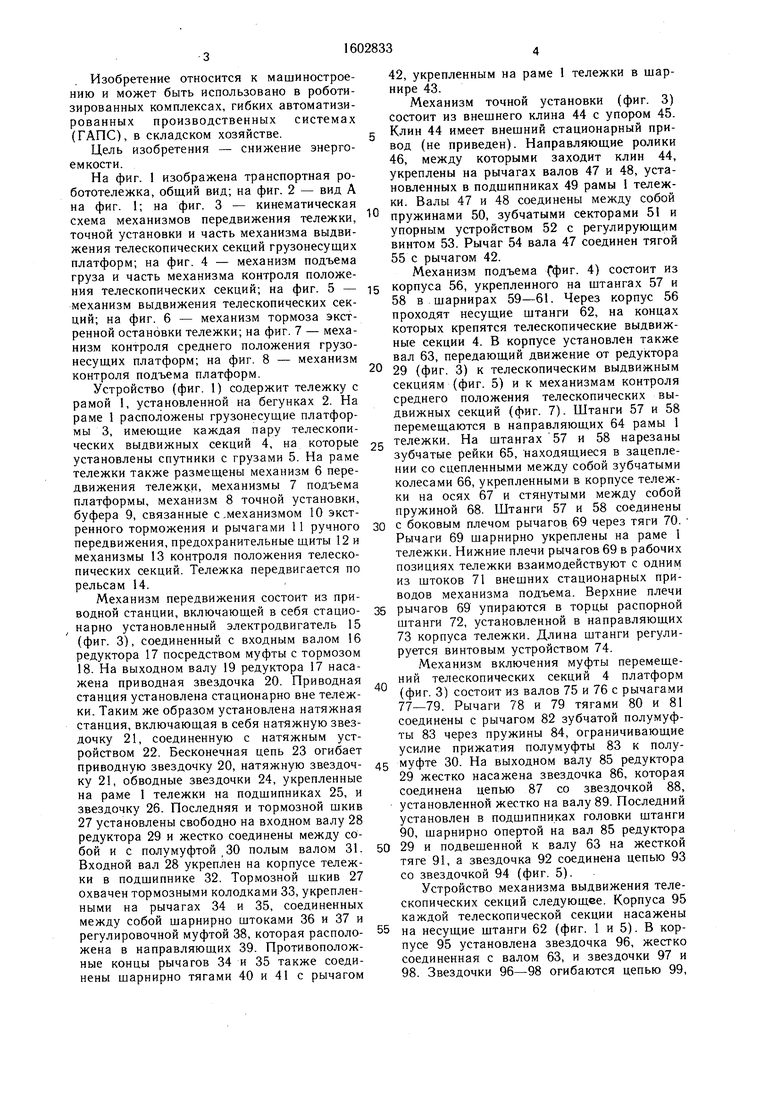

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| Тележка для транспортировки листовых грузов | 1989 |
|
SU1638052A1 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХГРУЗОВИАТЕНТНО-Т[Ш-"-:НАНБИЬЛИО | 1970 |
|
SU280321A1 |
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| Ручная каретка для набивки тканей | 1980 |
|
SU971672A1 |
| Тормоз колесной тележки | 1988 |
|
SU1643287A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Телескопический ленточный конвейер | 1976 |
|
SU745796A1 |
| Автомат для приварки к торцам труб элементов соединительной арматуры | 1974 |
|
SU640830A1 |
Изобретение относится к машиностроению и может быть использовано в роботизированных комплексах. Цель изобретения - снижение энергоемкости. Устройство содержит тележку, которая состоит из рамы 1, установленной на колесах /бегунках/, подъемных грузонесущих платформ с выдвижными телескопическими секциями, механизмов передвижения и позиционирования тележки. Механизм передвижения выполнен в виде имеющей стационарный привод бесконечной цепи 23, охватывающей установленные на раме 1 звездочки, одна из которых снабжена тормозом и кинематически связана с механизмом выдвижения телескопических секций, а механизм позиционирования выполнен в виде раздвижных подпружиненных роликов 46, которые взаимодействуют в рабочих позициях с выдвижными штырями внешних фиксирующих устройств, каждый из которых выполнен в виде клина 44, причем указанные штыри кинематически связаны с одной из полумуфт механизма выдвижения телескопических секций. Механизм подъема грузонесущих платформ выполнен в виде шарнирно закрепленных в корпусе рычагов, которые кинематически связаны с грузонесущими платформами. Тормоз выполнен в виде снабженного тормозными колодками 33 шкива 27, насаженного на общий со звездочкой полый горизонтальный вал 31. Механизм выдвижения телескопических секций выполнен в виде бесконечных цепей. 1 з.п.ф-лы, 8 ил.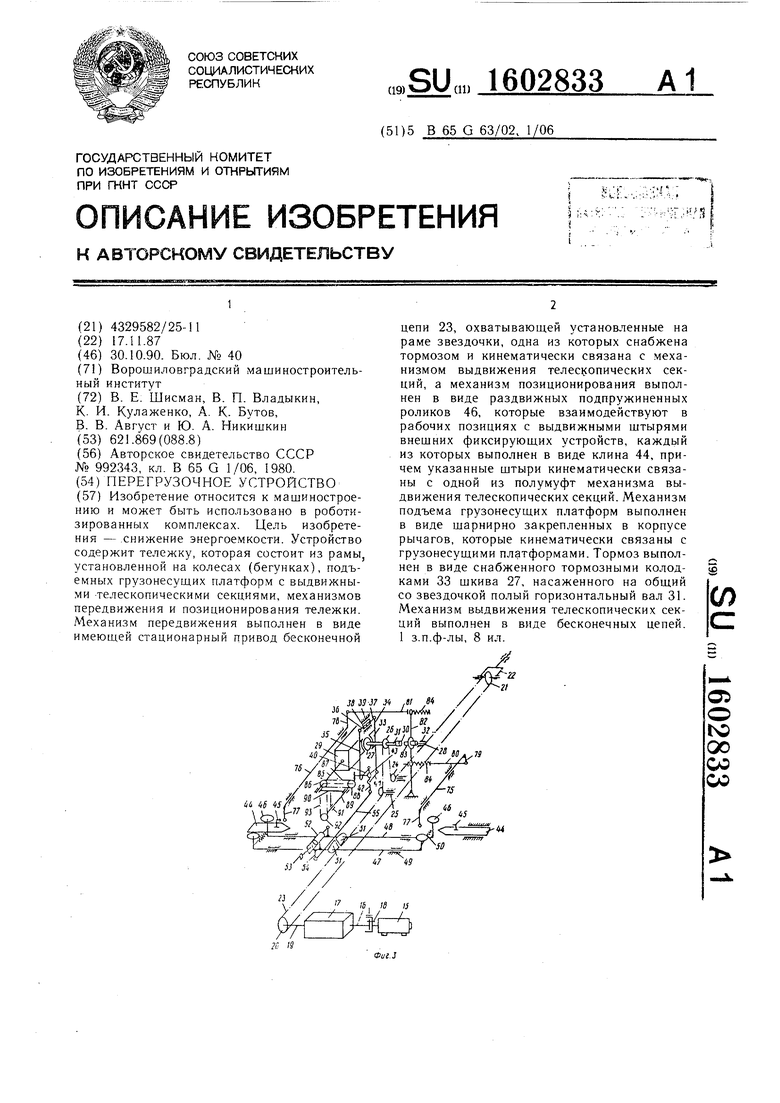
if if Фиг, 1
жжш
11
2J
видА
W
Фиг. 2
68 66 66 65
Фиг.4
Ю9 W6 07 0в
по
FF- 10
Фиг.5
7 /
v
1 130 т фиа.д
/4,5--- WW-cp
/43
v
т
уг7
n
155 754
Ц
фиг. 8
| Устройство для перемещения манипулятора | 1980 |
|
SU992343A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
