ff
со со
00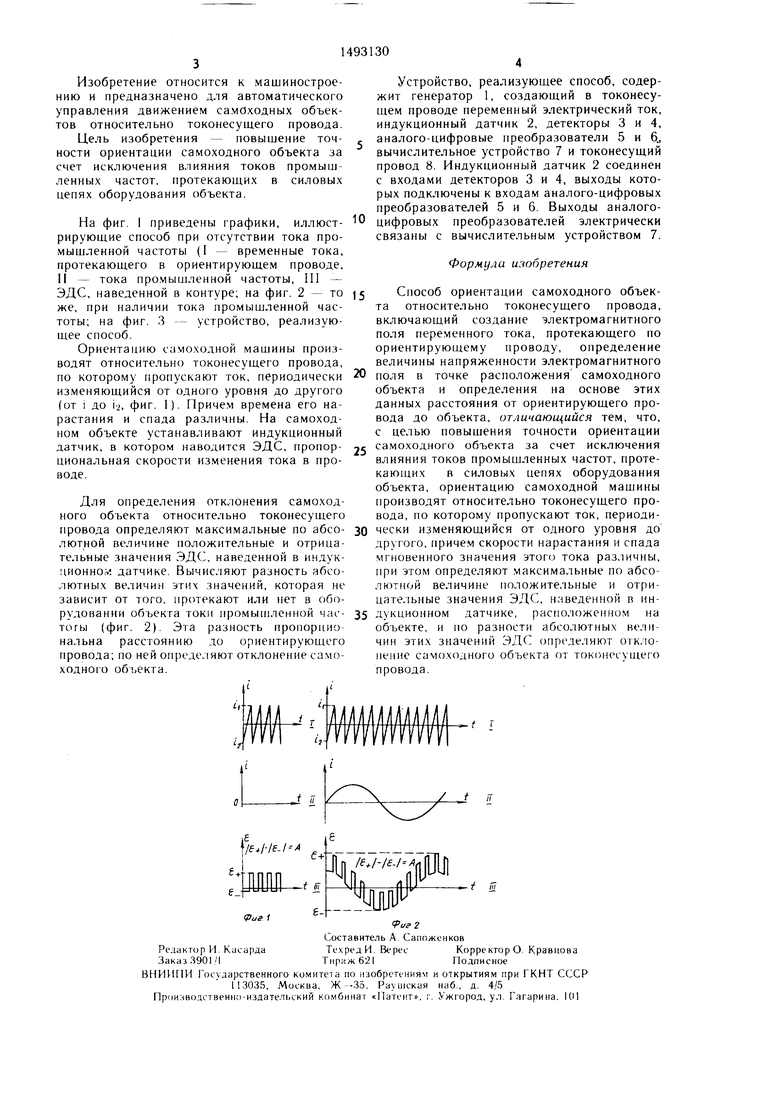
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1996 |
|
RU2142121C1 |
| ВЫСОКОВОЛЬТНОЕ ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 2007 |
|
RU2368906C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА РОТОРА СИНХРОННЫХ ГЕНЕРАТОРОВ С БЕСЩЕТОЧНЫМ ВОЗБУЖДЕНИЕМ | 2007 |
|
RU2327273C1 |
| ВЫСОКОВОЛЬТНОЕ ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 2007 |
|
RU2346285C1 |
| СПОСОБ БЕСКОНТАКТНОГО СЕЛЕКТИВНОГО ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ИМПУЛЬСНО-РЕЗОНАНСНО-ВИХРЕТОКОВОГО МЕТОДА (ВАРИАНТЫ) | 2023 |
|
RU2819826C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2004 |
|
RU2281467C2 |
Изобретение относится к машиностроению и предназначено для автоматического управления движением самоходных объектов относительно токонесущего провода. Цель изобретения - повышение точности ориентации самоходного объекта за счет исключения влияния токов промышленных частот, протекающих в силовых цепях оборудования объекта. Ориентацию самоходного объекта производят относительно токонесущего провода, по которому пропускают периодически изменяющийся от одного уровня до другого ток, причем время его нарастания и спада различны. На самоходном объекте устанавливают индукционный датчик, в котором наводится ЭДС, пропорциональная скорости изменения тока в проводе. Для определения отклонения объекта определяют максимальные по абсолютной величине положительные и отрицательные значения наведенной в индукционном датчике ЭДС. Вычисляют разность этих значений, по которой определяют отклонение самоходного объекта. Для осуществления способа индукционный датчик 2 соединен с входами детекторов 3, 4, выходы которых подключены к входам аналого-цифровых преобразователей 5, 6. Выходы аналого-цифровых преобразователей электрически связаны с вычислительным устройством 7. 3 ил.
фиг.З
Изобретение относится к машиностроению и предназначено для автоматического управления движением самоходных объектов относительно токонесущего провода.
Цель изобретения - повышение точности ориентации самоходного объекта за счет исключения влияния токов промышленных частот, протекающих в силовых цепях оборудования объекта.
Устройство, реализующее способ, содержит генератор 1, создающий в токонесущем проводе переменный электрический ток, индукционный датчик 2, детекторы 3 и 4, аналого-цифровые преобразователи 5 и 6., вычислительное устройство 7 и токонесущий провод 8. Индукционный датчик 2 соединен с входами детекторов 3 и 4, выходы которых подключены к входам аналого-цифровых преобразователей 5 и 6. Выходы аналого- На фиг. I приведены графики, иллюст- цифровых преобразователей электрически рирующие способ при отсутствии тока про- связаны с вычислительным устройством 7.
20
мышленной частоты (I - временные тока, протекающего в ориентирующем проводе, И - тока про.мышленной частоты. III - ЭДС, наведенной в контуре; на фиг. 2 - то 15 же, при наличии тока промышленной частоты; на фиг. 3 - устройство, реализую- шее способ.
Ориентацию самоходной машины производят относительно токонесущего провода, по которому пропускают ток, периодически изменяющийся от одного уровня до другого (от i до 12, фиг. 1). Причем времена его нарастания и спада различны. На самоходном объекте устанавливают индукционный датчик, в котором наводится ЭДС, пропорциональная скорости изменения тока в проводе.
Для определения отклонения самоходного объекта относительно токонесущего
25
Формула изобретения
Способ ориентации самоходного объекта относительно токонесущего провода, включающий создание электромагнитного поля переменного тока, протекающего по ориентирующему проводу, определение величины напряженности электромагнитного поля в точке расположения самоходного объекта и определения на основе этих данных расстояния от ориентирующего провода до объекта, отличающийся тем, что, с целью повышения точности ориентации самоходного объекта за счет исключения влияния токов промышленных частот, протекающих в силовых цепях оборудования объекта, ориентацию самоходной машины производят относительно токонесущего провода, по которому пропускают ток, периодипровода определяют максимальные по абсо- ЗО чески изменяющийся от одного уровня до
лютной величине положительные и отрицательные значения ЭДС, наведенной в индук- iUtoHHOiv. датчике. Вычисляют разность абсолютных величин этих значений, которая не зависит от того, протекают или нет в ободругого, причем скорости нарастания и спада мгновенного значения этого тока различны, при этом определяют .максимальные по абсолютной величине положительные и отрицательные значения ЭДС, наведенной в инрудовании объекта токи промышленной час-35 дукционном датчике, расположенном на
тогы (фиг. 2). Эта разность пропорцио-объекте, и по разности абсолютных велинальна расстоянию до ориентирующегочин этих значений ЭДС определяют отклопровода; по ней определяют отклонение само-пение самоходного объекта от токонесунгего
ходного обьекта.провода.
риг 1
Редактор И. Касарда Заказ 3901/1
fi/f г
Составитель А. Сапожонков
Те.хредИ. ВересКорректор О. Кравцова
Тнрнж621Подписное
НИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
Формула изобретения
Способ ориентации самоходного объекта относительно токонесущего провода, включающий создание электромагнитного поля переменного тока, протекающего по ориентирующему проводу, определение величины напряженности электромагнитного поля в точке расположения самоходного объекта и определения на основе этих данных расстояния от ориентирующего провода до объекта, отличающийся тем, что, с целью повышения точности ориентации самоходного объекта за счет исключения влияния токов промышленных частот, протекающих в силовых цепях оборудования объекта, ориентацию самоходной машины производят относительно токонесущего провода, по которому пропускают ток, периодидругого, причем скорости нарастания и спада мгновенного значения этого тока различны, при этом определяют .максимальные по абсолютной величине положительные и отрицательные значения ЭДС, наведенной в инt г
г «7
| Бражников И | |||
| А | |||
| и др | |||
| Индукционный метод контроля ширины угольных целиков | |||
| Горный журнал | |||
| - Известия ВУЗов, 1971, № 9. |
