Изобретение относится к приборостроению, вчастности кавтоматизации управления подвижными объектами. Наибольшее применение оно может найти при создании систем автоматической ориентации самоходных машин при задании опорного направления с помощью токонесущего проводника.
Известно устройство автоматического управления движением транспортных средств, содержащее генератор, ориентирующие токонесущие проводники с однонаправленными токами, чувствительный элемент, схему сравнения, источник эталонного напряжения.
Известно также устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных датчика, связанных со входами схемы сравнения и исполнительные органы.
Недостатком известных устройств является низкая информативность о положении транспортных средств на заключительных участках трассы относительно ее края.
Наиболее близким по своей технической сущности является устройство ориентации, содержащее два индукционных измерительных преобразователя, сумматор, две схемы сравнения, источник опорного напряжения, схему индикации.
Недостатком такого устройства является низкая точность контроля положения машины на заключительных участках трассы относительно ее края в связи с тем, что на результат контроля оказывает влияние положение машины относительно оси трассы. т.е. на одном и том же расстоянии от края трассы (до замыкающего проводника) при различных положениях машины будут фиксироваться различные значения, что обусXI
XI
х|
о
00
|ю
ловлено нелинейным характером распространения ориентирующего поля.
Целью изобретения является повышение точности контроля положения транспортных средств на заключительных участках трассы относительно ее края,
Поставленная цель достигается путем введения третьего измерительного преобразователя и третьей схемы сравнения при этом выход третьего измерительного преобразователя соединен с первым входом третьей схемы сравнения, на второй вход которой подключен выход сумматора, а ее выход соединен с входом второй схемы сравнения.
Благодаря введению третьего измерительного преобразователя и третьей схемы сравнения достигается повышение точности контроля положения транспортных средств на заключительных участках трассы относительно ее края.
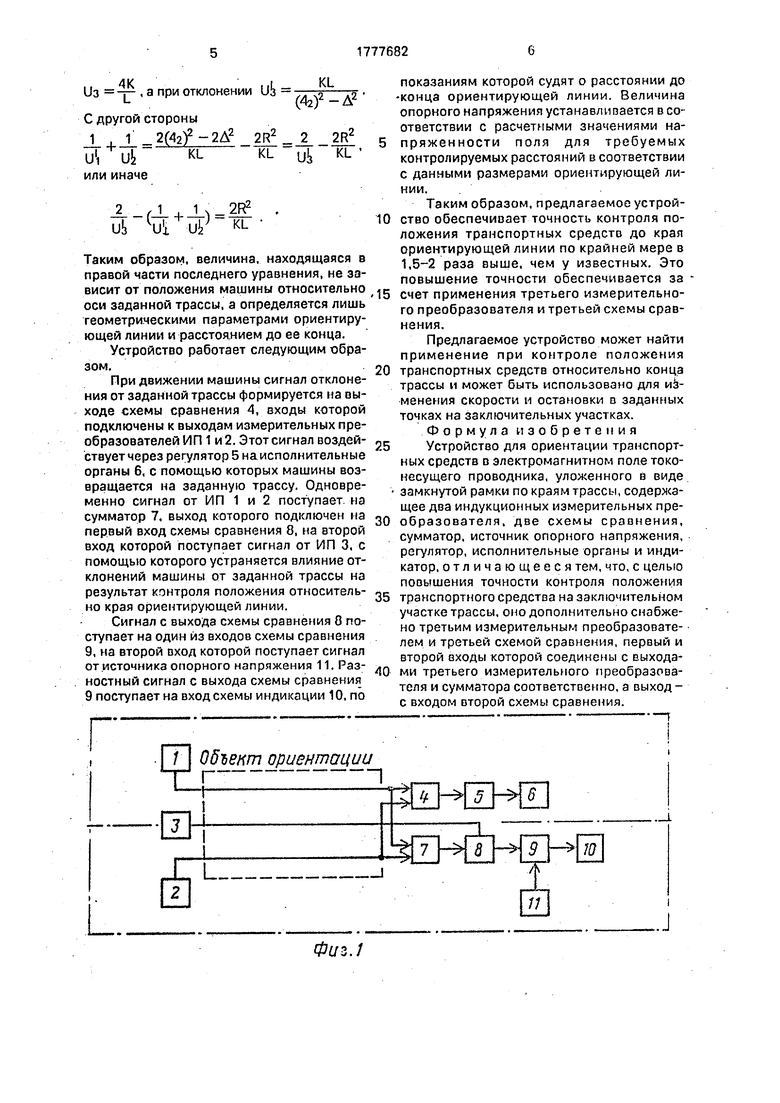
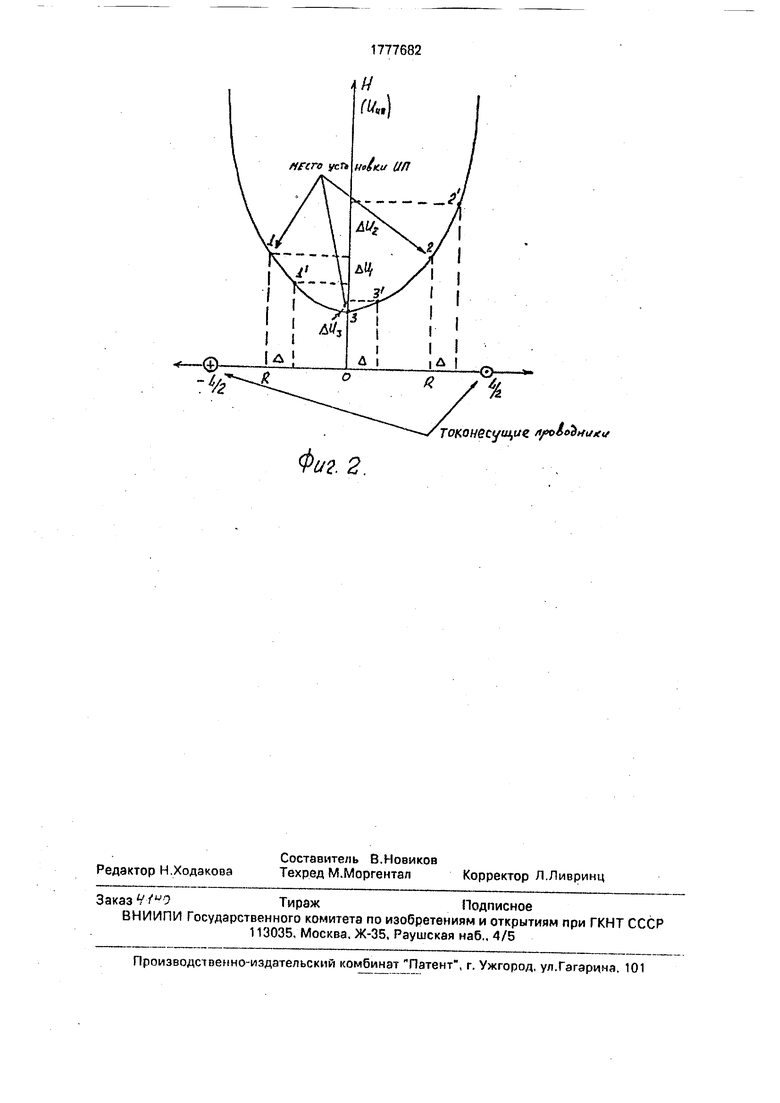
На фиг.1 представлена блок-схема устройства, где 1,2 - первый и второй измерительные преобразователи, (ИП), 3 - третий измерительный преобразователь, 4 - первая схема сравнения, 5 - регулятор, 6 - исполнительные органы, 7 - сумматор, 8 - третья схема сравнения, 9 - вторая схема сравнению, 10 - схема индикации, 11.- источник опорного напряжения. На фиг.2 представлена эпюра распределения ориентирующего поля на трассе, где точки 1, 2, 3 - соответствуют положению измерительных преобразователей при нахождении машины точно на трассе, а 1,2,3- при смещении ее на величину А от трассы.
Устройство содержит измерительные преобразователи (ИП) 1-3, первые два расположены симметрично, а третий - на продольной оси машины. Выходы ИП 1,2 подключены к первой схеме сравнения 4 и сумматору 7. Выход схемы 4 подключен к входу регулятора 5. выход которого связан с исполнительными органами 6. Выход сумматора 7 связан с первым входом третьей схемы сравнения 8, на второй вход подключен выход сумматора 7. Выход схемы сравнения 8 соединен с первым входом второй схемы сравнения 9, второй вход которой соединен с источником опорного напряжения 11. Вход схемы индикации 10 подключен к выходу схемы сравнения 9.
Устройство работает следующим образом.
Как известно, напряженность поля в точке на расстоянии R от проводника определяется какН , т.е. имеет в общем
Случае нелинейный характер, в связи с чем при отклонении контролируемого объекта
от заданной трассы абсолютные приращения в точках измерения (фиг.2) не будут равны. Следовательно, в результате контроля положения объекта относительно конца
трассы будет вноситься ошибка. Рассмотрим формирование сигнала отклонения от заданной трассы (фиг.2).1, Поскольку измерительные преобразователи 1 и 2 находятся на фиксированном расстоянии друг от друга
симметрично продольной оси движения, то сигналы от них при нахождении машины на трассе равны друг другу.
+ 4TTR- К (4z)2L R2
где К - - (cos at - со s ог):
L - расстояние между проводниками;
2R - расстояние между измерительными преобразователями.
При отклонении на величину А сигналы будут равны
U ,
K-L
K-L
(42)- R + А (42) + R - А KL
30
(-(R-A)2
Ub
K-L
K-L
(4з) - R - A r(42) + R + А K-L
(-(R+A)2
Переходя к обратным величинам для удобства проведения анализа, получаем, что суммарный сигнал от ИП 1,2, характеризующий положение машины относительно края ориентирующей линии
1 . 1 -(42)2-(R-Af , U i UbKL
, (42 j2 - (R + А)2 2C42)2 - 2(R2 + A2)
KL
KL
зависит также и от отклонения машины от заданной трассы, в связи с чем точность контроля будет не постоянной. С целью устранения этого недостатка предлагается введение измерительного преобразователя,
расположенного на середине расстояния между ИП 1 и 2. Выходной сигнал третьего ИП при нахождении машины точно на трассе равен
4К
Уз -р - а ПРИ отклонен
С другой стороны
1 . 1 2(42)2-2А2
+
u i ub
или иначе
KL
2 г 1 i 1 - 2R2 V. .1 . .1 / к|
Таким образом, величина, находящаяся в правой части последнего уравнения, не зависит от положения машины относительно оси заданной трассы, а определяется лишь геометрическими параметрами ориентирующей линии и расстоянием до ее конца.
Устройство работает следующим образом.
При движении машины сигнал отклонения от заданной трассы формируется на выходе схемы сравнения 4, входы которой подключены к выходам измерительных преобразователей ИП 1 и 2. Этот сигнал воздей- ствуетчерез регулятор 5 наисполнительные органы 6, с помощью которых машины возвращается на заданную трассу. Одновременно сигнал от ИП 1 и 2 поступает на сумматор 7, выход которого подключен на первый вход схемы сравнения 8, на второй вход которой поступает сигнал от ИП 3, с помощью которого устраняется влияние отклонений машины от заданной трассы на результат контроля положения относительно края ориентирующей линии.
Сигнал с выхода схемы сравнения 8 поступает на один из входов схемы сравнения 9, на второй вход которой поступает сигнал от источника опорного напряжения 11. Разностный сигнал с выхода схемы сравнения 9 поступает на вход схемы индикации 10, по
Г
показаниям которой судят о расстоянии до конца ориентирующей линии. Величина опорного напряжения устанавливается в соответствии с расчетными значениями на- 5 пряженности поля для требуемых контролируемых расстояний в соответствии с данными размерами ориентирующей линии.
Таким образом, предлагаемое устрой10 ство обеспечивает точность контроля положения транспортных средств до края ориентирующей линии по крайней мере в 1,5-2 раза выше, чем у известных. Это повышение точности обеспечивается за
5 счет применения третьего измерительного преобразователя и третьей схемы сравнения.
Предлагаемое устройство может найти применение при контроле положения
0 транспортных средств относительно конца трассы и может быть использовано для изменения скорости и остановки в заданных точках на заключительных участках. Формула изобретения
5 Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных измерительных пре0 образователя, две схемы сравнения, сумматор, источник опорного напряжения, регулятор, исполнительные органы и индикатор, отличающееся тем, что, с целью повышения точности контроля положения
5 транспортного средства на заключительном участке трассы, оно дополнительно снабжено третьим измерительным преобразователем и третьей схемой сравнения, первый и второй входы которой соединены с выхода0 ми третьего измерительного преобразователя и сумматора соответственно, а выход- с входом второй схемы сравнения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1796087A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода | 1982 |
|
SU1064884A1 |
| Устройство контроля параллельности проходимых траекторий | 1984 |
|
SU1190031A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2263021C1 |
| Способ автоматического контроля положения секции механизированной крепи | 1990 |
|
SU1756556A1 |
| Устройство контроля положения горной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1263844A1 |
| Система управления автоматического напольного электротранспорта | 1985 |
|
SU1274102A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
Изобретение относится к приборостроению, в частности к устройствам автоматического контроля и управления подвижными объектами в индукционном поле токонесущего проводника. Целью изобретения является повышение точности контроля на дистанционном участке трассы. Исключение из результата контроля погрешностей, вызываемых смещениями машины от заданной, достигается путем введения дополнительного измерительного преобразователя и дополнительной схемы сравнения. Выход дополнительного измерительного преобразователя соединен с первым входом дополнительной схемы сравнения, на второй вход которой подключен выход сумматора, а ее выход соединен с входом второй схемы сравнений. 2 ил.
i.
Фиъ.1
:fc
Фиг. 2.
ТОКОНбСуцие flfooobnuid/
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода | 1982 |
|
SU1064884A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
