Изобретение относится к неразрушающему контролю и может быть использовано для контроля пространственно- распределенных электроф1 зических и геометрических параметров электропроводящих объектов.
Целью изобретения является повьш е- ние точности контроля формы электро- проводяпр1х неод(Н)рол11остей за счет определения внутри зоны контроля каждого чувствительного элемента вихрето- кового преобразователя координат отдельных точек, принадлежащих этим не- однородностям.
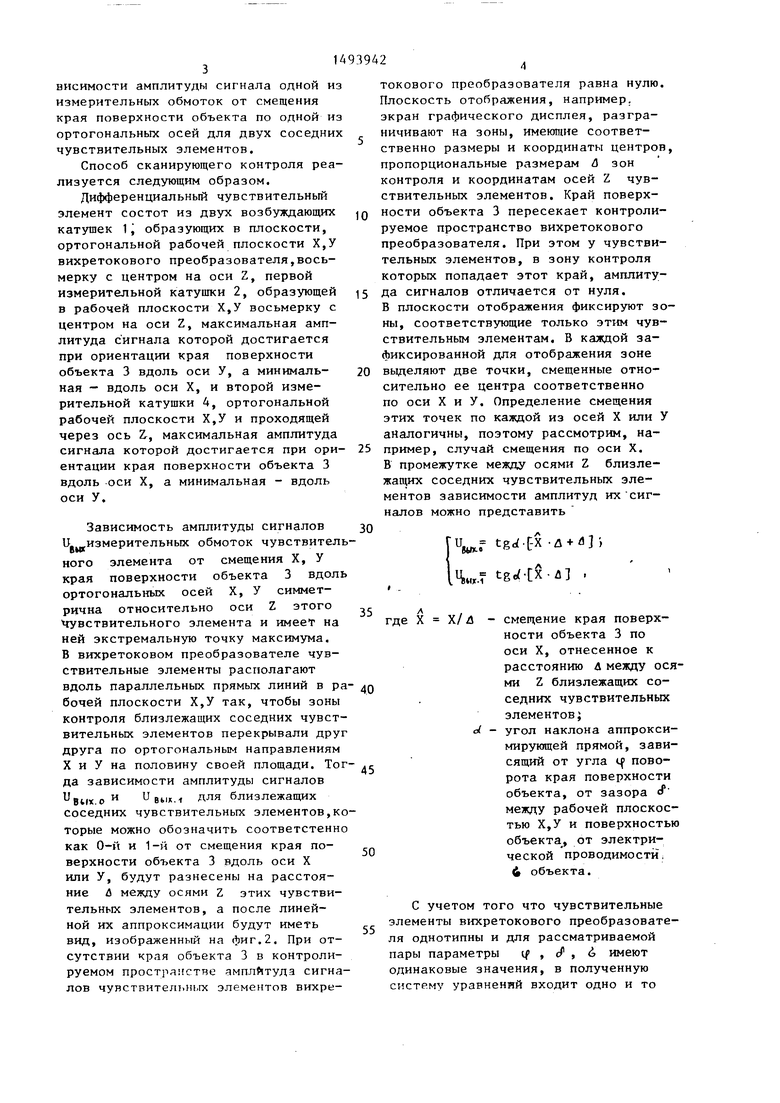
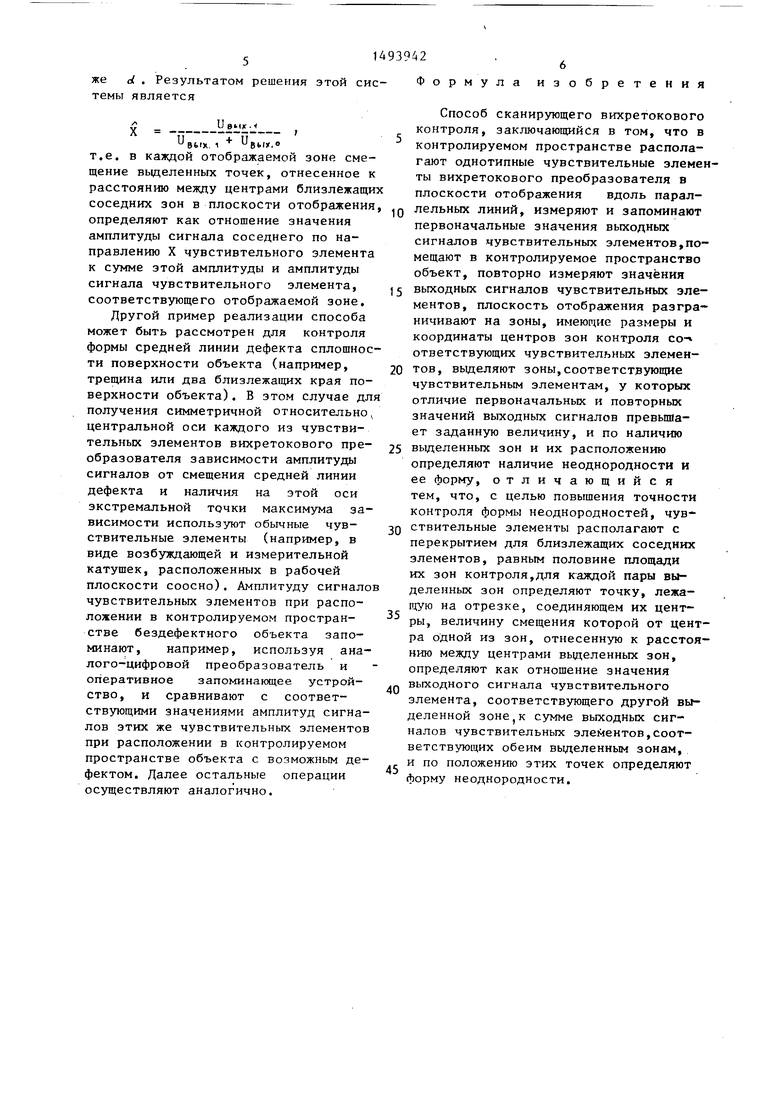
На фиг.1 изображено расположение обмоток одного чувстБительного элемента вихретокопог о п)1еобразопателяJ а фиг. 2 - лннрйнля аппроксимация зависимости амплитуды сигнала одной из измерительных обмоток от смещения края поверхности объекта по одной из ортогональных осей для двух соседних чувствительных элементов.
Способ сканирующего контроля реализуется следующим образом.
Дифференциальный чувствительньй элемент состот из двух возбуждающих катушек 1 образующих в плоскости, ортогональной рабочей плоскости Х,У вихретокового преобразователя,восьмерку с центром на оси Z, первой измерительной катушки 2, образующей в рабочей плоскости Х,У восьмерку с центром на оси Z, максимальная амплитуда сигнала которой достигается при ориентации края поверхности объекта 3 вдоль оси У, а минимальная - вдоль оси X, и второй измерительной катушки 4, ортогональной рабочей плоскости Х,У и проходящей через ось Z, максимальная амплитуда сигнала которой достигается при ориентации края поверхности объекта 3 вдоль оси X, а минимальная - вдоль оси У.
Зависимость амплитуды сигналов и измерительных обмоток чувствительного элемента от смещения X, У края поверхности объекта 3 вдоль ортогональных осей X, У симметрична относительно оси Z этого чувствительного элемента и имеет на ней экстремальную точку максимума. В вихретоковом преобразователе чувствительные элементы располагают вдоль параллельных прямых линий в ра бочей плоскости Х,У так, чтобы зоны контроля близлежащих соседних чувст- вительньк элементов перекрывали друг друга по ортогональным направлениям X и У на половину своей площади. Тог да зависимости амплитуды сигналов Вкх.о Ugm. для близлежащих соседних чувствительных элементов,которые можно обозначить соответстенно как 0-й и 1-й от смещения края поверхности объекта 3 вдоль оси X или У, будут разнесены на расстояние и между осями Z этих чувствительных элементов, а после линейной их аппроксимации будут иметь вид, изображенный на фиг.2. При отсутствии края объекта 3 в контролируемом прострлмстне амплитуда сигналов чувствительных элементов вихре
токового преобразователя равна нулю. Плоскость отображения, например, экран графического дисплея, разграничивают на зоны, имеющие соответственно размеры и координаты центров, пропорциональные размерам и зон контроля и координатам осей Z чувствительных элементов. Край поверхности объекта 3 пересекает контролируемое пространство вихретокового преобразователя. При этом у чувствительных элементов, в зону контроля которых попадает этот край, амплитуда сигналов отличается от нуля. В плоскости отображения фиксируют зоны, соответствующие только этим чувствительным элементам. В каждой зафиксированной для отображения зоне выделяют две точки, смещенные относительно ее центра соответственно по оси X и У. Определение смещения этих точек по каждой из осей X или У аналогичны, поэтому рассмотрим, например, случай смещения по оси X. В промежутке между осями Z близлежащих соседних чувствительных элементов зависимости амплитуд их сигналов можно представить
Vr tgc(.C-X-A + , Лмхи .
где X Х/Л d смещение края поверхности объекта 3 по оси X, отнесенное к расстоянию 4 между осями Z близлежащих соседних чувствительных элементов;
угол наклона аппроксимирующей прямой, зависящий от угла ц поворота края поверхности объекта, от зазора cf между рабочей плоскостью Х,У и поверхностью объекта, от электрической проводимости. 4 объекта.
С учетом того что чувствительные элементы вихретокового преобразователя однотипны и для рассматриваемой пары параметры if , (/ , d имеют одинаковые значения, в полученную систему уравнений входит одно и то
же d . Результатом решер ия этой системы является
рму
л а
и
6
3 о
бретения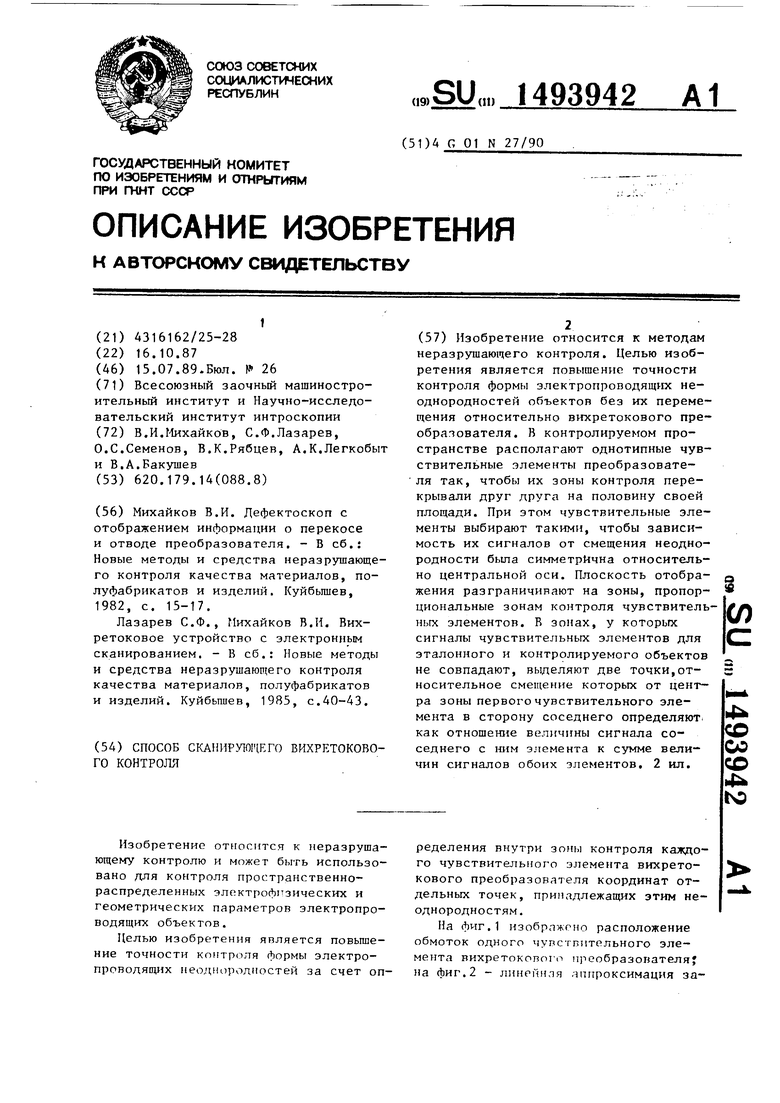
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 2022 |
|
RU2796194C1 |
| Матрица вихретокового преобразователя | 1986 |
|
SU1462178A1 |
| Вихретоковый преобразователь для дефектоскопии | 2023 |
|
RU2813477C1 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛИЧЕСКИХ АРМИРУЮЩИХ ЭЛЕМЕНТОВ В РЕЗИНОТРОСОВЫХ ЛЕНТАХ | 2023 |
|
RU2816247C1 |
| Многоэлементный вихретоковый преобразователь | 2020 |
|
RU2743151C1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2011 |
|
RU2463589C1 |
| Способ электромагнитного контроля | 1989 |
|
SU1668926A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1995 |
|
RU2090882C1 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКО-МАГНИТНОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2014 |
|
RU2566416C1 |
Изобретение относится к методам неразрушающего контроля. Целью изобретения является повышение точности контроля формы электропроводящих неоднородностей объектов без их перемещения относительно вихретокового преобразователя. В контролируемом пространстве располагают однотипные чувствительные элементы преобразователя так, чтобы их зоны контроля перекрывали друг друга на половину своей площади. При этом чувствительные элементы выбирают такими, чтобы зависимость их сигналов от смещения неоднородности была симметрична относительно центральной оси. Плоскость отображения разграничивают на зоны, пропорциональные зонам контроля чувствительных элементов. В зонах, у которых сигналы чувствительных элементов для эталонного и контролируемого объектов не совпадают, выделяют две точки, относительное смещение которых от центра зоны первого чувствительного элемента в сторону соседнего определяют как отношение величины сигнала соседнего с ним элемента к сумме величин сигналов обоих элементов. 2 ил.
и в(f
U7
у ------------ I
вых. 1 ъчг. т.е. в каждой отображаемой зоне смещение выделенных точек, отнесенное к расстоянию между центрами близлежащи соседних зон в плоскости отображения определяют как отношение значения амплитуды сигнала соседнего по направлению X чувстивтельного элемента к сумме этой амплитуды и амплитуды сигнала чувствительного элемента, соответствующего отображаемой зоне. Другой пример реализации способа может быть рассмотрен для контроля формы средней линии дефекта сплошности поверхности объекта (например, трещина или два близлежащих края поверхности объекта). В этом случае дл получения симметричной относительно/ центральной оси каждого из чувствительных элементов вихретокового преобразователя зависимости амплитуды сигналов от смещения средней линии дефекта и наличия на этой оси экстремальной точки максимума зависимости используют обычные чувствительные элементы (например, в виде возбуждающей и измерительной катушек, расположенных в рабочей плоскости соосно), Амплитуду сигнало чувствительных элементов при расположении в контролируемом пространстве бездефектного объекта запоминают, например, используя аналого-цифровой преобразователь и оперативное запоминающее устройство, и сравнивают с соответствующими значениями амплитуд сигналов этих же чувствительных элементов при расположении в контролируемом пространстве объекта с возможным дефектом. Далее остальные операции осуществляют аналогично.
0
5
0
5
0
5
0
5
Способ сканирующего вихретокового контроля, заключающийся в том, что в контролируемом пространстве располагают однотипные чувствительные элементы вихретокового преобразователя в плоскости отображения вдоль параллельных линий, измеряют и запоминают первоначальные значения выходных сигналов чувствительных элементов,помещают в контролируемое пространство объект, повторно измеряют значения выходных сигналов чувствительных элементов, плоскость отображения разграничивают на зоны, имеющие размеры и координаты центров зон контроля со- ответствующих чувствительных элементов, выделяют зоны,соответствующие чувствительным элементам, у которых отличие первоначальных и повторных значений выходных сигналов превьщ)а- ет заданную величину, и по наличию выделенных зон и их расположению определяют наличие неоднородности и ее форму, отличающийся тем, что, с целью повышения точности контроля формы неоднородностей, чувствительные элементы располагают с перекрытием для близлежащих соседних элементов, равным половине площади их зон контроля,для каждой пары выделенных зон определяют точку, лежа- 1цую на отрезке, соединяющем их центры, величину смещения которой от центра одной из зон, отнесенную к расстоянию между центрами выделенных зон, определяют как отношение значения выходного сигнала чувствительного элемента, соответствующего другой вы- деленной зоне,к сумме выходных сигналов чувствительных элементов,соответствующих обеим выделенным зонам, и по положению этих точек определяют форму неоднородности.
сЛ
Фиг. i
Увых.
0-й ч/уоств- yflfMPf fyy
Фи.2
2/Л/л /
f U itt/ScmS- jrf/ l ff/rr
| Михайков В.И | |||
| Дефектоскоп с отображением информации о перекосе и отводе преобразователя | |||
| - В сб.: Новые методы и средства неразрушающего контроля качества материалов, полуфабрикатов и изделий | |||
| Куйбышев, 1982, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Лазарев С.Ф., Михайков В.И | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - В сб.: Новые методы и средства неразрушающего контроля качества материалов, полуфабрикатов и изделий | |||
| Куйбышев, 1985, с.40-43. | |||
