.15
а
4аь
СО 4 о . ел
Изобретение относится к электротехнике, в частности к устройствам для изготовления изолированных жил.
Цель изобретения - расширение технологических возможностей путем совмещения операций приема изолированной жилы и ее последующей перемотки на катушки крутильной мншины.
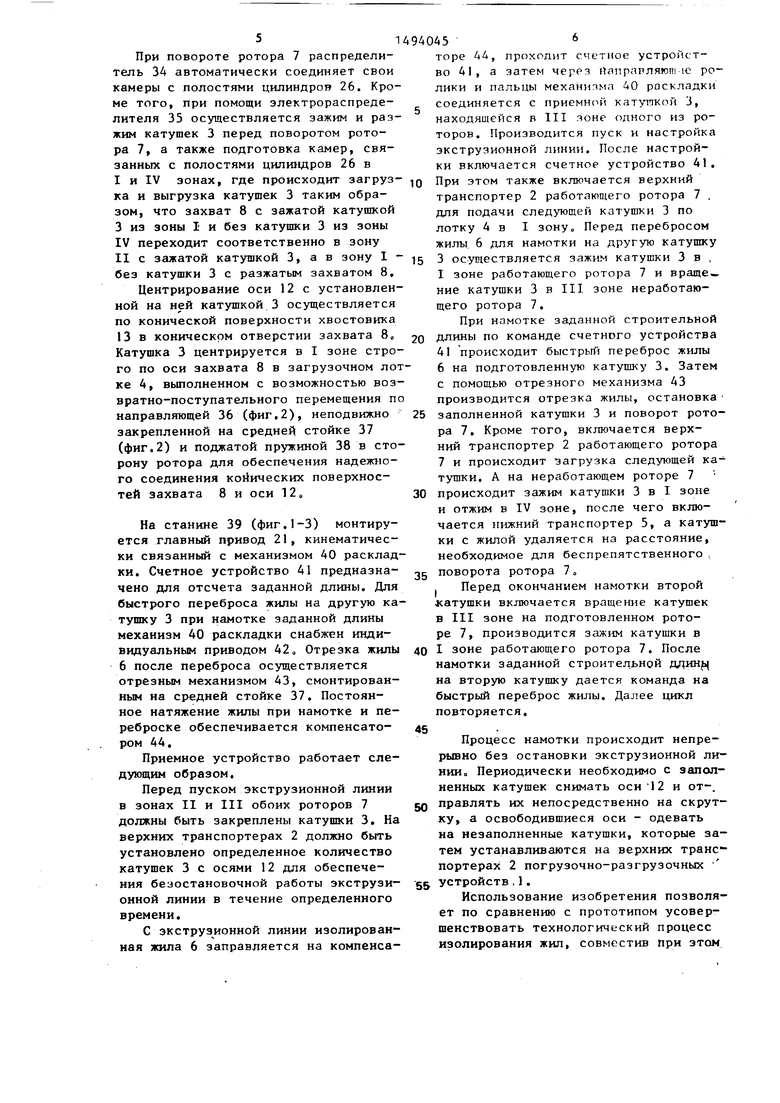
На фиг.1 изображено приемное уст- д ройство, главный вид; на фиг.2 - то же, вид сверху; на фиГрЗ - схема приемного устройства; на фиг.4 - захват о
Два загрузочно-разгрузочных устройства 1 (фиг. 1-2) имеют каж,цое до t5 два транспортера. Верхний транспортер
2вьтолнен с возможностью подачи устанавливаемых на нем катушек 3 на загрузочный лоток 4 о Нижний транспортер 5 предназначен для удаления катушек
3с намотанной изолированной жилой 6
Катушка с верхнего транспортера 2 (фиг.1,, 2) попадает на лоток 4, по которому под действием сил тяжести .скатьтается вниз во впадину лотка, имеющую цилиндрическую поверхность, ось которой совпадает с осью захвата в загрузочной зоне I ротора 7, а радиус кривизны равен радиусу шейки катушки. Таким образом, щеки катуш- ЗО ки охватывают лоток с . обеих сторон с определенным зазором, необходимым для беспрепятственного скатывания, а базирование происходит по шейке катушкио35
Для установки и снятия.катушек 3 служат два ротора 7( ), каж- дьй из которых имеет по меньшей мере три симметрично расположенных по Q окрузкности зоны с захватами 8 для крепления катушек 3. По конструктив- . ным соображениям возможно использование четырех и более зон,
20
25
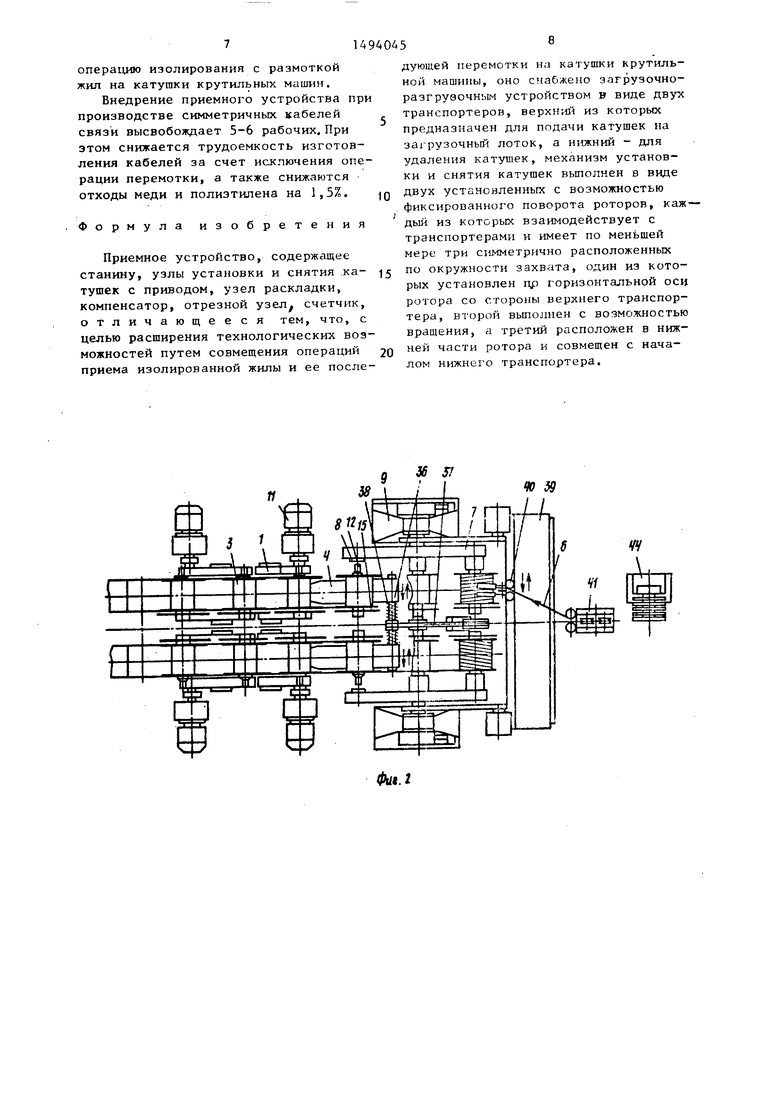
Ротор 7 см;м ,тировзн на стойке 9 возможностью периодического поворот на заданный угол и его фиксации с, В приведенном случае периодический по ворот ро-тора 7 на угол 90° ос тцест вляется при помощи мальтийского кре та 0 (фиг.З), Транспортеры 2 и 5 снабжены индиви,цуальньП 1и приводами 11 (фиг Л).
На катушке 3 установлены оси 12 (), кгтждяя из которых имеет с одного конца хвостовик 13 для установки в захвате 8 ротора 7, а на другом конце установлен быстросъем- ный зажим 1А с переводным диском 15 Зажим 14 вьтолнен с возможностью фиксации на оси 12 при помощи поджатого пружиной 1Ь стержня 17, вход щего в паз оси 12о Переводной диск 15 имеет лопасти 18 (фиго) для захвата жилы 6 при переброске о Поджа- тие катушки 3 осуществляется с помощью пиноли 19 под действием пружины 20 (фиг.Д).
Захват 8 выполнен с возможностью вращения от главно о привода 21 (фи1 .3), кинематически связанного с центральной шестернею 22, вращающей промежуточ1-,ые валы 23. Брапсоние захвата 8 только V; рабочей 111 зоне осутдествляется f noMoui io электромагнитной муфты 2А и зубчатой передач 25. Возвратно-поступательные перемещения захвата 3 осу1дес;з вляются при помощи сило во т о 1:11.а1шдра 26 (фиг.З, 4), неподвижно установленного на роторе 7 и связанного с подпружиненной рьгчажной системой 27 крепления катушек 1/.
Рычажная система 27 (фиг.4) состо ит трех пар симметрич ло расположенных па окружности и шарнирно соеди-
В предлагаемом приемном устройст- д ненных планок 28, свободными концаве вьтолнено четыре зоны, обозначенные на фиг Л и 3 цифрами I-IVo Загрузочная зона I расположена на горизонтальной оси ротора 7 со стороны верхнего транспортера 2„ Введение промежуточной зоны II, расположенной сверху на вертикальной оси ротора 7, позволяеь сйизить высоту расположения рабочей зоны III, облегчая заправку жилы 6, Рабочая зон III вьтолнена с возможностью вращения катушек 3. Разгрузочная зона IV расположена в i нижней части ротора 7 и совмещена с началом нижнего транспортера 5.,
50
55
ми одна из них 3aKpenj:eHa на захвате 8, а - па nojj3yHe 29, поджатом тремя пру/.лшаки 30 и связанном через подшипН41Ки у1 и 32 со штоком 33 цилиндра 26. Каж, цилиндр 26 связан с распределителем 34 (фиг.З, рабочего тела, установленного на оси вращения оотора 7, Подача рабочего тела в распределитель 34 производится по трем каналам, на фиг.З обозначенным П,, flj, П . Каналы II j и И , связаны электрораспределителем 35 и предназначены для управления цилиндрами 26 в зонах I и IV.
д
5
О 5
Q
0
5
Ротор 7 см;м ,тировзн на стойке 9 с возможностью периодического поворота на заданный угол и его фиксации с, В приведенном случае периодический поворот ро-тора 7 на угол 90° ос тцест- вляется при помощи мальтийского креста 0 (фиг.З), Транспортеры 2 и 5 снабжены индиви,цуальньП 1и приводами 11 (фиг Л).
На катушке 3 установлены оси 12 (), кгтждяя из которых имеет с одного конца хвостовик 13 для установки в захвате 8 ротора 7, а на другом конце установлен быстросъем- ный зажим 1А с переводным диском 15. Зажим 14 вьтолнен с возможностью фиксации на оси 12 при помощи поджатого пружиной 1Ь стержня 17, входящего в паз оси 12о Переводной диск 15 имеет лопасти 18 (фиго) для захвата жилы 6 при переброске о Поджа- тие катушки 3 осуществляется с помощью пиноли 19 под действием пружины 20 (фиг.Д).
Захват 8 выполнен с возможностью вращения от главно о привода 21 (фи1 .3), кинематически связанного с центральной шестернею 22, вращающей промежуточ1-,ые валы 23. Брапсоние захвата 8 только V; рабочей 111 зоне осутдествляется f noMoui io электромагнитной муфты 2А и зубчатой передач 25. Возвратно-поступательные перемещения захвата 3 осу1дес;з вляются при помощи сило во т о 1:11.а1шдра 26 (фиг.З, 4), неподвижно установленного на роторе 7 и связанного с подпружиненной рьгчажной системой 27 крепления катушек 1/.
Рычажная система 27 (фиг.4) состоит трех пар симметрич ло расположенных па окружности и шарнирно соеди-
ненных планок 28, свободными конца
ми одна из них 3aKpenj:eHa на захвате 8, а - па nojj3yHe 29, поджатом тремя пру/.лшаки 30 и связанном через подшипН41Ки у1 и 32 со штоком 33 цилиндра 26. Каж, цилиндр 26 связан с распределителем 34 (фиг.З, рабочего тела, установленного на оси вращения оотора 7, Подача рабочего тела в распределитель 34 производится по трем каналам, на фиг.З обозначенным П,, flj, П . Каналы II j и И , связаны электрораспределителем 35 и предназначены для управления цилиндрами 26 в зонах I и IV.
При повороте ротора 7 распределитель ЗА автоматически соединяет свои камеры с полостями цилиндров 26. Кроме того, при помощи электрораспределителя 35 осуществляется зажим и разжим катушек 3 перед поворотом ротора 7, а также подготовка камер, связанных с полостями цилиндров 26 в
Iи IV зонах, где происходит загрузка и выгрузка катущек 3 таким образом, что захват 8 с зажатой катушкой 3 из зоны I и без катушки 3 из зоны IV переходит соответственно в зону
IIс зажатой катушкой 3, а в зону 1 - без катушки 3 с разжатым захватом 8,
Центрирование оси 12 с установленной на ней катушкой 3 осуществляется по конической поверхности хвостовика 13 в коническом отверстии захвата 8. Катушка 3 центрируется в I зоне строго по оси захвата 8 в загрузочном лотке 4, выполненном с возможностью возвратно-поступательного перемещения по направляющей 36 (фиг.2), неподвижно закрепленной на средней стойке 37 (фиг.2) и поджатой пружиной 38 в сторону ротора для обеспечения надежного соединения койических поверхностей захвата 8 и оси 12,
На станине 39 (фиг.1-3) монтируется главный привод 21, кинематически связанный с механизмом 40 раскладки. Счетное устройство 41 предназначено для отсчета заданной длины. Для быстрого переброса жилы на другую катушку 3 при намотке заданной длины механизм 40 раскладки снабжен индивидуальным приводом 42 о Отрезка жилЫ 6 после переброса осуществляется отрезным механизмом 43, смонтированным на средней стойке 37. Постоянное натяжение жилы при намотке и переброске обеспечивается компенсатором 44.
Приемное устройство работает следующим образом.
Перед пуском экструзионной линии в зонах II и III обоих роторов 7 должны быть закреплены катушки 3. На верхних транспортерах 2 должно быть установлено определенное количество катушек 3 с осями 12 для обеспечения безостановочной работы экструзи- онной линии в течение определенного времени.
С экструзионной линии изолированная жила 6 заправляется на компенсаторе 4Д, проходит счетное устройство 41, а затем через FlanpannHrciii ic ролики и пальцы механипма 40 раскладки соединяется с приемной катугак(1Й 3, находящейся в III зоне одного из роторов. Производится пуск и настройка экструзионной линии. После настройки включается счетное устройство 41.
При этом также включается верхний транспортер 2 работающего ротора 7 . для подачи следующей катушки 3 по лотку 4 в I зону Перед перебросом жилы 6 для намотки на другую катушку
3 осуп1ествляется зажим катушки 3 в , I зоне работающего ротора 7 и враще ние катушки 3 в III зоне неработающего ротора 7.
При намотке заданной строительной
длины по команде счетного устройства 41 происходит быстрый переброс жилы
6на подготовленную катушку 3. Затем с помощью отрезного механизма 43 производится отрезка жилы, остановка
заполненной катушки 3 и поворот ротора 7. Кроме того, включается верхний транспортер 2 работающего ротора
7и происходит загрузка следующей катушки. А на неработающем роторе 7
происходит зажим катушки 3 в I зоне и отжим в IV зоне, после чего включается нижний транспортер 5, а катушки с жилой удаляется на расстояние, необходимое для беспрепятственного , поворота ротора 7
. Перед окончанием намотки второй катушки включается вращение катушек в III зоне на подготовленном роторе 7, производится зажим катушки в
I зоне работающего ротора 7. После намотки заданной строительной на вторую катушку дается команда на быстрый переброс жилы. Далее цикл повторяется.
Процесс намотки происходит непрерывно без остановки экструзионной линии. Периодически необходимо с заполненных катушек снимать оси 12 и от-.
правлять их непосредственно на скрутку, а освободившиеся оси - одевать на незаполненные катушки, которые затем устанавливаются на верхних транспортерах 2 погрузочно-разгрузочных
устройств.1.
Использование изобретения позволяет по сравнению с прототипом усовершенствовать технологический процесс изолирования жил, совместив при этом
операцию изолирования с размоткой жил на катушки крутильных машин.
Внедрение приемного устройства при производстве симметричных кабелей связи высвобождает 5-6 рабочих. При этом снижается трудоемкость изготовления кабелей за счет исключения операции перемотки, а также снижаются отходы меди и полиэтилена на 1,5%.
Формула изобретения
Приемное устройство, содержащее станину, узлы установки и снятия ка- тушек с приводом, узел раскладки, компенсатор, отрезной узел счетчик, отличающееся тем, что, с целью расширения технологических возможностей путем совмещения операций приема изолированной жилы и ее после
дующей перемотки на катушки крутильной машины, оно снабжено загрузочно- разгрувочным устройством в виде двух транспортеров, верхний из которых предназначен для подачи катушек на загрузочный лоток, а нижний - для удаления катушек, механизм установки и снятия катушек выполнен в виде двух устанонленньгх с возможностью фиксированного поворота роторов, каж- дьй из которых взаимодействует с транспортерами и имеет по меньшей мере три симметрично расположенных по окружности захвата, один из которых установлен пр горизонтальной оси ротора со стороны верхнего транспортера, второй вьтолнен с возможностью вращения, а третий расположен в нижней части ротора и совмещен с началом нижнего транспортера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для непрерывной намотки проволоки | 1986 |
|
SU1349822A1 |
| Способ непрерывной намотки ферромагнитной проволоки на катушки и устройство для его осуществления | 1984 |
|
SU1194531A1 |
| Способ образования мотков проволокии уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1975 |
|
SU844092A1 |
| Устройство для контроля процесса перемотки провода с подающей катушки на приемную | 1987 |
|
SU1509335A1 |
| Устройство для непрерывной намотки на катушки нитеобразных материалов | 1972 |
|
SU448903A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ СКОРОСТНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1972 |
|
SU360128A1 |
| АВТОМАТИЧЕСКИЙ БУХТОНАМОТЧИК | 2006 |
|
RU2312054C1 |
| Устройство для намотки на катушки нитеобразных материалов | 1975 |
|
SU640779A1 |
| ЗВУКОЗАПИСЫВАЮЩЕЕ И ВОСПРОИЗВОДЯЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2046402C1 |
| УСТРОЙСТВО для НЕПРЕРЫВНОЙ НАМОТКИ НА КАТУШКИ НИТЕОБРАЗНЫХ МАТЕРИАЛОВ | 1973 |
|
SU394124A1 |

Изобретение относится к электротехнике ,в частности, к устройствам для изготовления изолированных жил. Цель изобретения - расширение технологических возможностей путем совмещения операций приема изолированной жилы и ее последующей перемотки на катушки крутильной машины. Для этого приемное устройство снабжено двумя загрузочно-разгрузочными механизмами, каждый из которых имеет два транспортера. Верхний транспортер 2 выполнен с возможностью подачи установленных на нем катушек 3 с осями и переводными дисками на загрузочный лоток 4. Нижний транспортер 5 служит для удаления катушек. Механизмы установки и снятия катушек выполнены в виде двух роторов 7. Каждый ротор имеет три зоны с захватами для крепления катушек. Загрузочная зона расположена на горизонтальной оси ротора 7 со стороны верхнего транспортера 2. Разгрузочная зона Ш расположена в нижней части ротора 7 и совмещена с началом нижнего транспортера 5. Рабочая зона выполнена с возможностью вращения катушек. Ротор выполнен с возможностью периодического поворота на заданный угол к его фиксации. 4 ил.
X J7
W Д9
W
55 5 54
Фа.д
Составитель Г.Панесенко Редактор М.Келемеш Техред Л.СердюковаКорректор И.Горная
Заказ 4116/47
Тираж 695
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. Д/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Puz.
Подписное
| Белоруссов Н.И | |||
| и др, Производство кабе;1ей и проиодон , М/, Энерг о- издат, ГЭ81, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
