Изобретение относится к машиностроению и может быть использовано в химической и энергетической промышленности при работах по замене отслуживших или поврежденных узлов в труднодоступных местах с ограниченным по времени пребыванием человека в зоне работ.
Цель изобретения - расширение функциональных возможностей и уменьшение времени на монтаж и демонтаж, а также повышение эксплуатационных качеств.
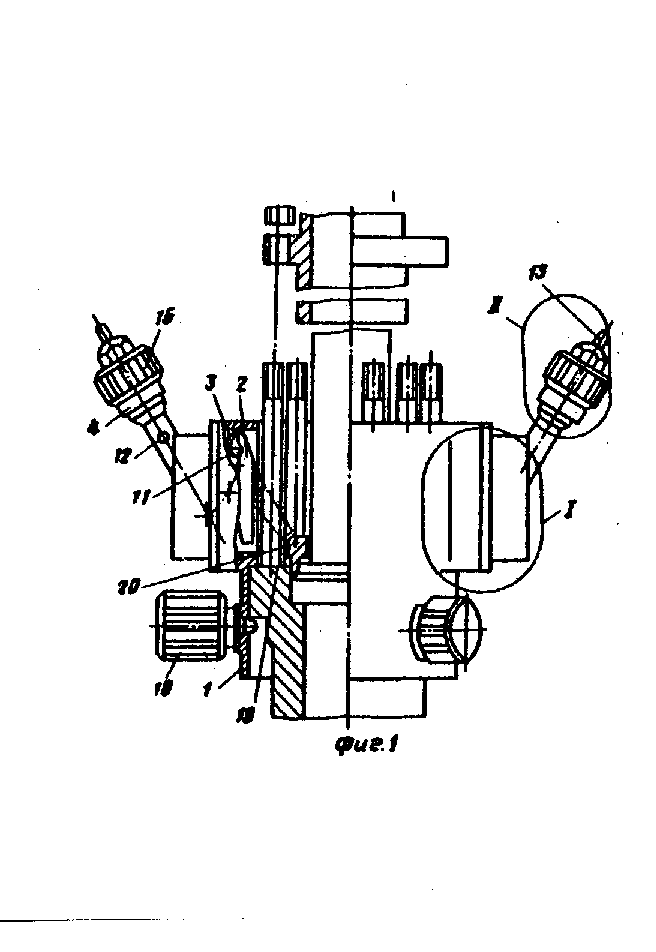
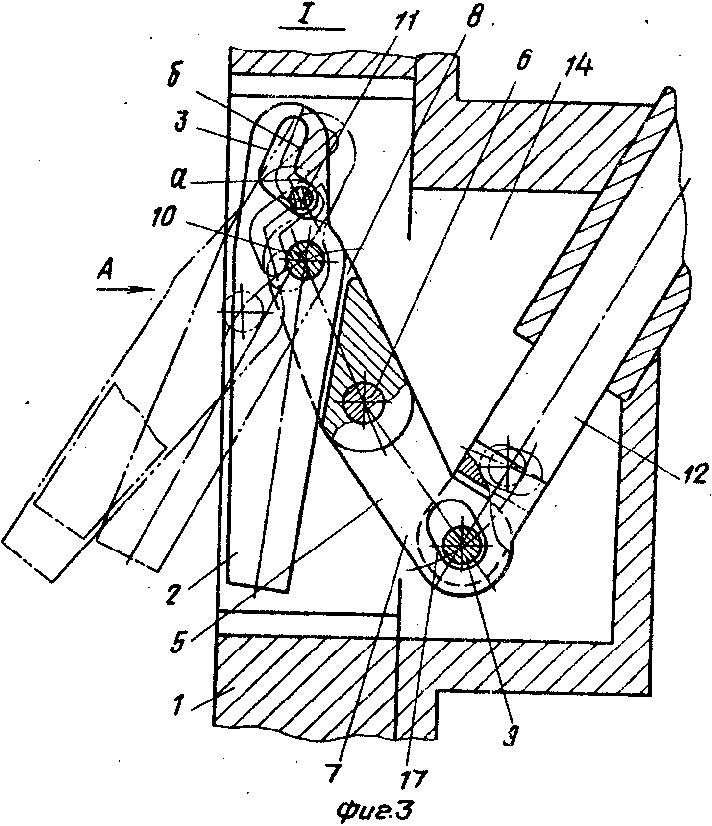
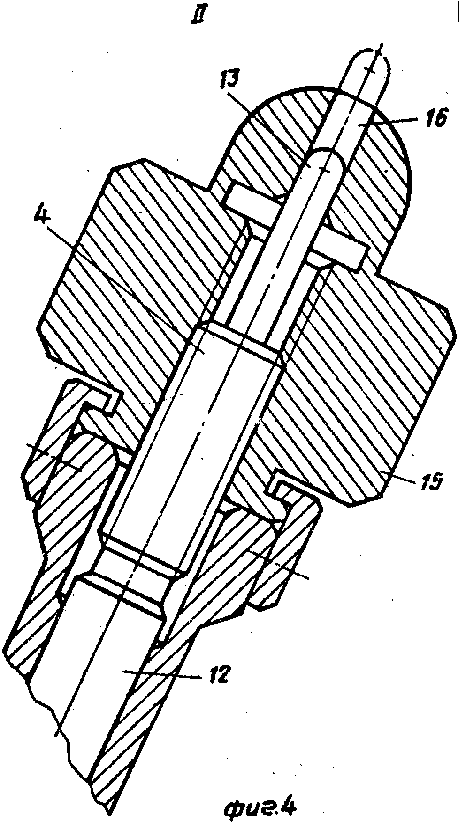
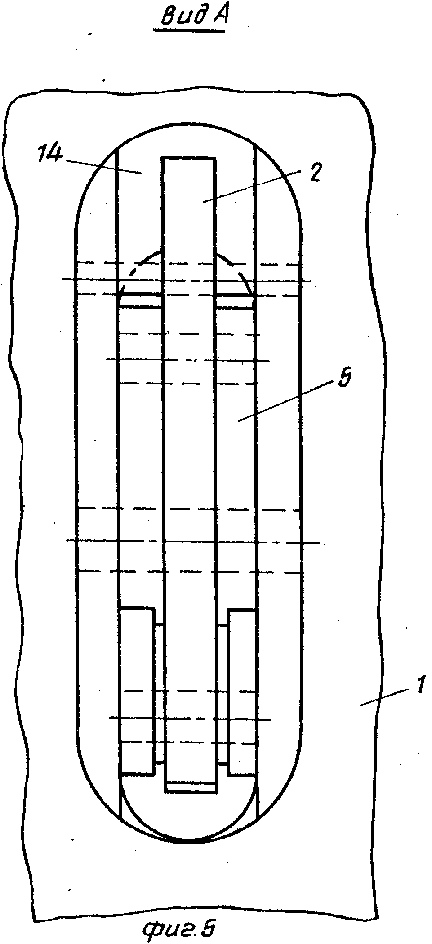
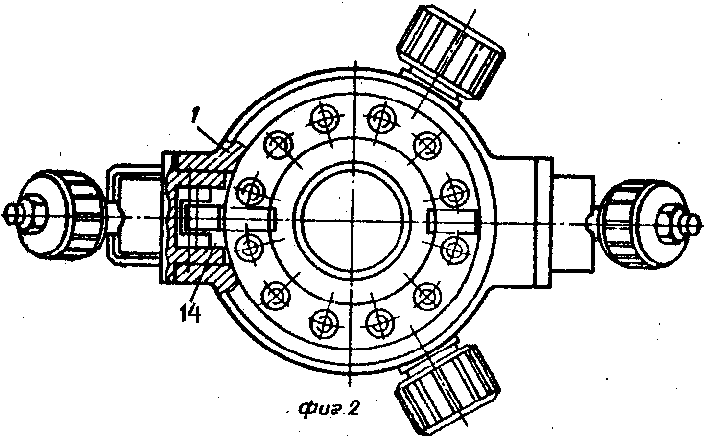
На фиг. 1 показан зажимной механизм с обстановкой; на фиг. 2 - вид сверху на фиг. 1; на фиг. 3 - узел I на фиг. 1 ; на фиг. 4 - узел II на фиг. 1; на фиг. 5 - вид А на фиг. 3.
Зажимной механизм содержит корпус 1, установленные диаметрально противоположно в корпусе 1 подвижные шарнирно закрепленные упоры 2, выполненные в виде кулачков с Г-образным пазом 3 и силовой винтовой пары 4 каждого упора. Упор 2 связан с винтовой парой 4 через двуплечий рычаг 5, ось 6 которого жестко укреплена в корпусе 1. Плечи 7 и 8 двуплечего рычага 5 через оси 9 и 10 соединены с винтовой парой 4 и упором 2. В корпусе 1 жестко укреплен штифт 11 для взаимодействия с ним Г-образного паза 3 упора 2. Шток 12 винтовой пары 4 снабжен датчиком 13 положения. Датчик 13 положения показывает в каком положении находится упор 2. Двуплечий рычаг 5 размещен в пазу 14 корпуса 1, что ограничивает его люфт вдоль оси 6. Силовая винтовая пара 4 содержит маточную гайку 15 со сквозным пазом 16, в котором размещен датчик 13 положения. Принадлежащий рычаг 5 паз 17, в котором размещена ось 9, выполнен овальным. Для установки и закрепления механизм снабжен фиксаторами 18.
Зажимной механизм работает следующим образом.
Механизм с убранными в карманы (пазы) 14 корпуса 1 упорами 2, устанавливают на изделие, ориентируют по углу поворота так, чтобы упоры 2 находились между шпильками изделия 19 и закрепляют фиксаторами 18. Затем вращением маточной гайки 15 зажимают элемент 20 изделия. При вращении маточной гайки 15 шток 12 перемещается и передает движение двуплечему рычагу 5 вокруг неподвижной оси 6, укрепленной в средней части кармана 14 корпуса 1 через подвижную ось 9. Рычаг 5 в свою очередь передает движение упору 2 через подвижную ось 10. Имеющийся в упоре 2 Г-образный паз 3 определяет траекторию движения самого упора 2. При скольжении участком "а" профильного паза 3 по неподвижному штифту 11 упор 2 поворачивается вокруг подвижной оси 10, затем при скольжении участком "б" профильного паза 3 по штифту 11 упор 2 перемещается параллельно оси штока 12, т. е. происходит прижим детали, что можно определить по выходу датчика положения 13 из паза 16.
Затем освобождают крепление и снимают со шпилек 19 изделия его головную часть, ремонтируют ее (заменяют на новую), устанавливают на место и закрепляют. Вращением маточной гайки 15 убирают упоры 2 в карманы (пазы 14) корпуса, освобождают фиксаторы 18 и снимают зажимной механизм с изделия. (56) Авторское свидетельство СССР N 512314, кл. F 16 B 2/14, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| Струбцина двойного действия | 1979 |
|
SU841955A1 |
| Струбцина двойного действия | 1975 |
|
SU537802A1 |
| Зажимное устройство | 1990 |
|
SU1759596A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Устройство для обработки штучных заготовок | 1989 |
|
SU1662727A1 |
| Зажимное устройство | 1988 |
|
SU1583243A1 |
Изобретение относится к машиностроению и может быть использовано в химической и энергетической промышленности при работах по замене отслуживших или поврежденных узлов в труднодоступных местах с ограниченным по времени пребыванием человека в зоне работ. Цель изобретения - расширение функциональных возможностей и уменьшение времени на монтаж и демонтаж, а также повышение эксплуатационных качеств. Механизм содержит корпус (К) 1, установленные в К 1 диаметрально противоположно подвижные шарнирно закрепленные упоры (У) 2, выполненные в виде кулачков с Г-образным пазом 3 и средство перемещения У 2. Средство перемещения У 2 выполнено в виде силовой винтовой пары (П) 4. У 2 связан с П 4 через двуплечий рычаг, ось которого жестко укреплена в К 1. Плечи двуплечего рычага через оси соединены с П 4 и У 2. В К 1 Жестко укреплен Штифт 11 для взаимодействия с ним Г-образного паза 3 У 2. Шток 12 П 4 снабжен датчиком 13 положения. Двуплечий рычаг размещен в пазу К 1. П 4 содержит маточную гайку 15 со сквозным пазом, в котором размещен датчик 13 положения. Для установки и закрепления механизм снабжен фиксатором 18. 1 з. п. ф-лы, 5 ил.