ком и со следящим силовым цилиндром, двуплечего рычага для взаимодействия с листом, шарнирно закрепленного при помощи оси на корпусе с возможностью поворота в вертикальной плоскости, нижний конец которого расположен на уровне между зажимными губками, а его верхний конец расположен над зажимными губками под углом 45 к оси захвата, рычага с радиальным пазом, установленного на оси двуплечего рычага с возможностью поворота в вертикальной плоскости и взаимодействия со следящим золотником, штифта, закрепленного на двуплечем рычаге и расположенного в радиальном пазу рычага, подпружиненной запирающей собачки, шарнирно закрепленной на рычаге с возможностью поворота в вертикальной плоскости и взаимодействия со штифтом двуплечего рычага, вилки, подвижно установленной на штоке силового цилиндра с возможностью взаимодействия со штоком силового цилиндра, с собачкой и нижним концом двуплечего рычага, и подпружиненного фиксатора, закрепленного на силовом цилиндре с возможностью взаимодействия с вилкой.
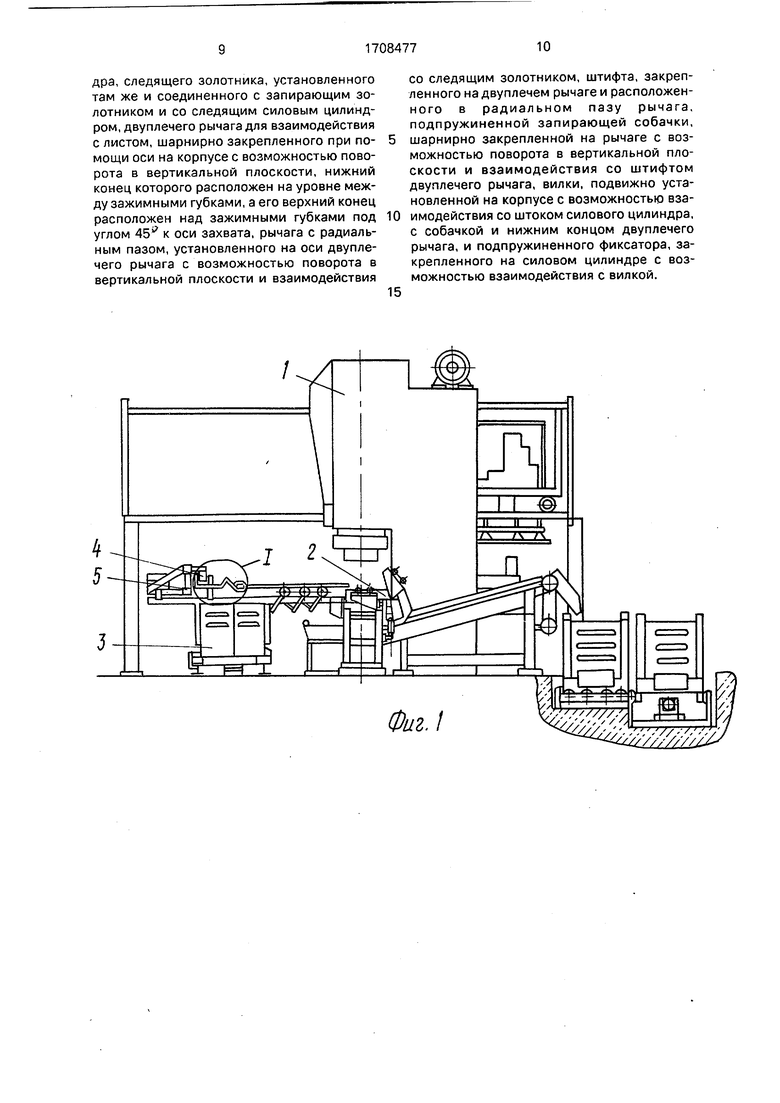
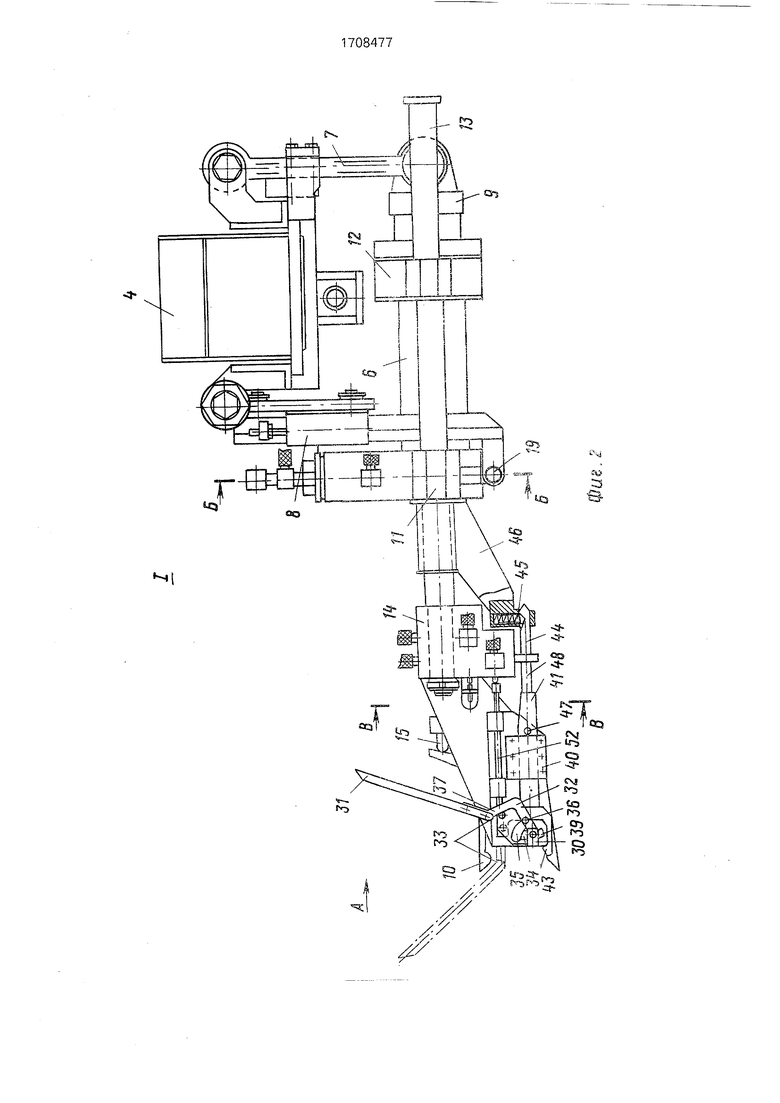
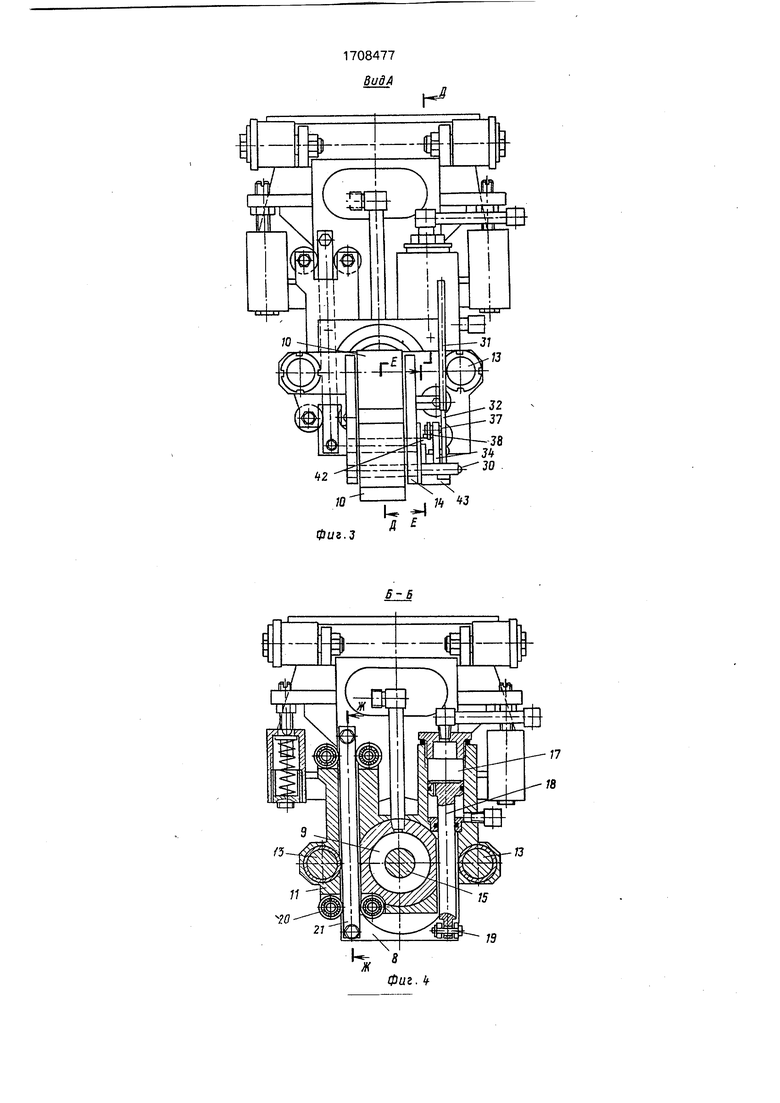
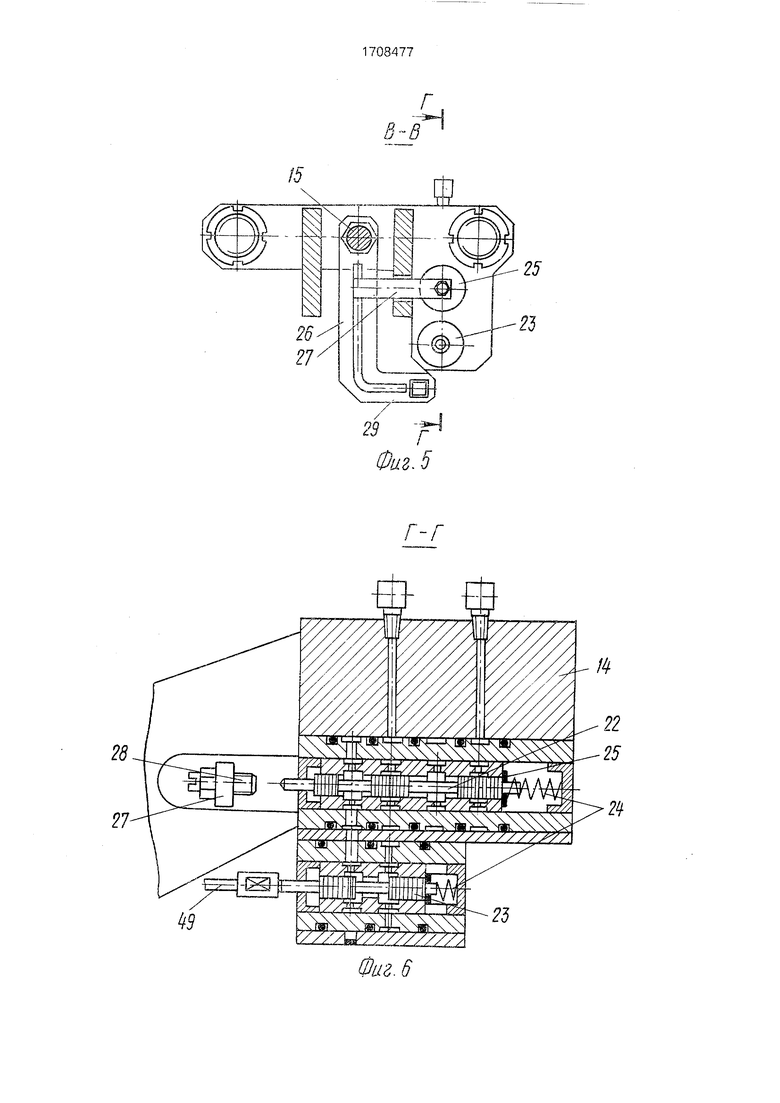
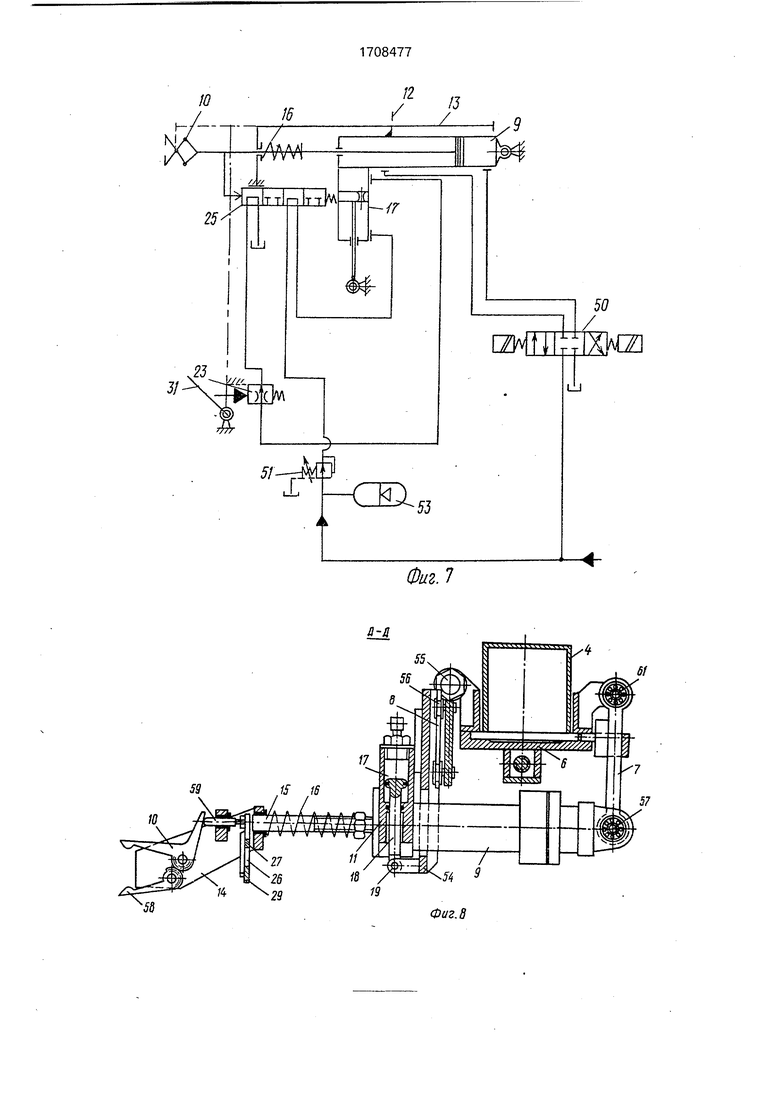
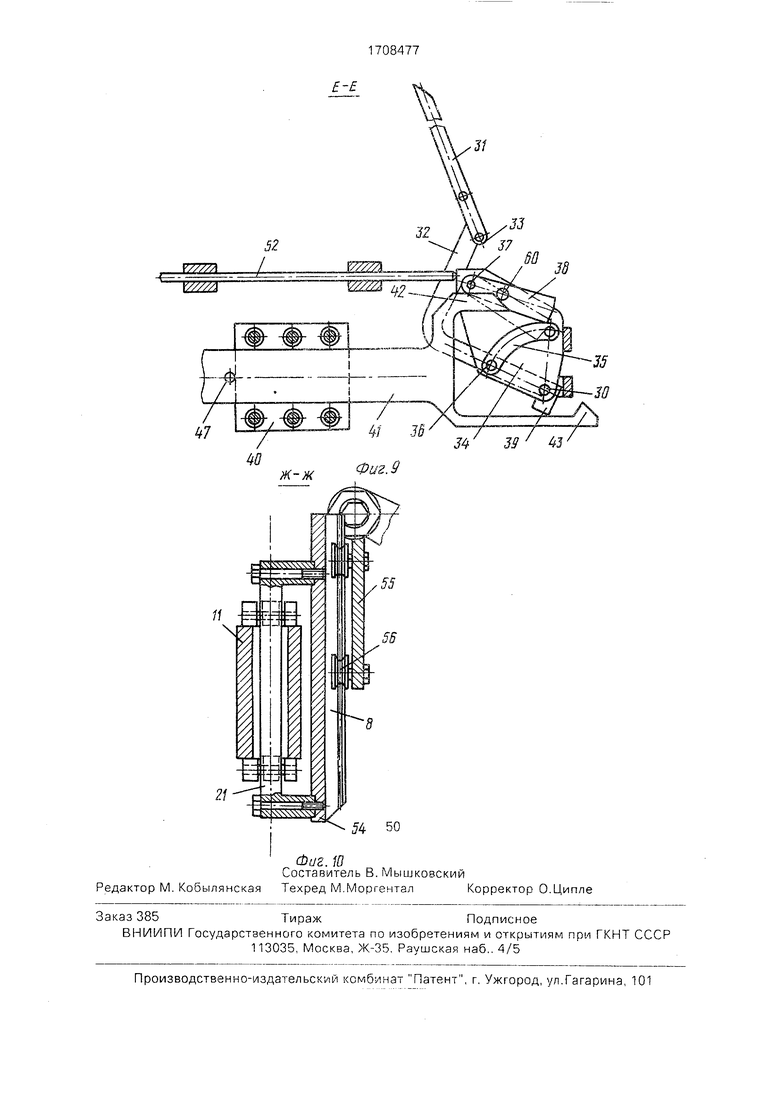
На фиг. 1 изображен модуль для автоматизированной безраскройной листовой штамповки, вид сбоку; на фиг. 2 - выноска i на фиг. 1, механизм захвата листа, вид сбоку; на фиг. 3 - вид А на фиг. 2, механизм захвата листа, вид спереди; на фиг. 4 - разрез Б-Б на фиг. 2, следящий цилиндр и направляющие механизма слежения; на фиг. 5 - разрез В-В на фиг. 2, привод отключающего золотника и управляющей вилки; на фиг. б - разрез Г-Г на фиг. 5, следящий и запирающий золотники; на фиг. 7 - гидрокинематическая принципиальная схема приводов захвата; на фиг. 8 - разрез Д-Д на фиг. 3 (первичные материалы-заявки), продольный разрез по захвату; на фиг. 9 - разрез Е-Е на фиг. 3, вид на механизм управления щупом; на фиг. 10 - разрез Ж-Ж на фиг. 4, крепление направляющей к нижней части телескопического переднего подвеса.
Модуль для автоматизированной безраскройной листовой штамповки включает кривошипный пресс 1 с установленным на нем штампом 2, координатный стол 3 и другое вспомогательное оборудование.
На тележке 4 каретки 5 координатного стола 3 закреплены по меньшей мере три захвата 6, снабженные устройством слежения за расположением кромки листа. Захваты 6 установлены на подвесах с двойными шарнирами - задним 7 и передним подпружиненным телескопическим 8. К нижнему
шарниру 7 заднего подвеса закреплен привод 9 клещей 10 захвата, представляющий собой силовой цилиндр с горизонтально расположенными осями.
В расточках передней 11 и задней 12 крышек привода 9 установлены цилиндрические скалки 13, заканчиваюш,иеся сзади буртами. На передних концах скалок 13 закреплен корпус 14 клещей 10, Шток 15 привода клещей проходит сквозь корпус 14. упираясь в него регулируемой пружиной 16 / своим концом упирабтся в приводной рычаг клещей 10. В передней крышке 11 выполнен дифференциальный следящий силовой цилиндр 17, шток 18 которого закреплен в нижнем шарнире 19 переднего подвеса 8.
Крышка 11 роликами 20 опирается на вертикальную направляюш,ую21, жестко закрепленную на нижней части телескопического подвеса 8.
В расточках корпуса 14 клещей 10 один под другим установлены золотники - двукромочный запирающий 22 и однокромочнь1й следящий 23, оба золотника нагружены пружьшами 24, упирающимися в шайбы 25,, под действу ем которых золотники стремятся ,занять крайнее переднее положение.
На штоке 15 привода клещей закреплен толкатель 26. в верхнем ригеле 27 которого установлен регулируемый упор 28. взаимодействующий с запирающим золотником 22. В нижнем ригеле 29 толкателя 26 выполнено прямоугольное отверстие.
На внешней поверхности корпуса 14 клещей на оси 30 установлен поворотный двуплечий рычаг 31, установленный на оси 30 на Г-образном рычаге 32 так, что его задний закругленный конец 33 свободен, и в рабочем положении двуплечего рычага (показано штрихпунктирной линией) располагается в зоне зева раскрытых клещей 10.
На одной оси 30 с двуплечим рычагом 31 установлен поворотный рычаг 34, в радиальном пазу 35 которого размещается штифт 36, запрессованный в Г-образный рычаг 32. В верхней части поворотного рычага 34 на оси 37 установлена качающаяся подпружиненная запирающая собачка 38. Г-образный рычаг 32 в нижней части оканчивается зубом 39, а относительно оси 30 нагружен пружиной кручения (не показана), стремящейся повернуть его по часовой стрелке.
На боковой поверхности корпуса 14 клещей в направляющих 40 установлена вилка 41, верхний конец 42 которой взаимодействует с собачкой 38, нижний конец 43 взаимо,цействует с зубом 39 рычага 32.
Задний удлиненный конец вилки 44 проходит сквозь прямоугольное отверстие нижнего ригеля 29 толкателя 26 и своим V-образным пазом взаимодействует с пружинным фиксатором 45, установленным в корпусе 46 привода 9 клещей. В заднем конце вилки 44 установлен штифт 47, ограничивающий ее перемещение вперед, и выполнен торец 48 для взаимодействия с ригелем 29. Поворотный рычаг 34 взаимодействует со следящим золотником 23 с помощью толкателя 49.
Гидроцилиндр привода 9 клещей управляется реверсивным гидрораспределителем 50 с электромагнитным управлением. Следящий цилиндр 17 соединен своей штоковой полостью с напорной магистралью через запирающий золотник 22. Штоковая полость следящего цилиндра 17 внутренним дросселем соединена с надпоршневой полостью, которая соединена со сливом последовательно через следящий 23 и запирающий 22 золотники.
В напорную линию следящих цилиндров включены редукционный клапан 51 и гидроаккумулятор 52, общие для всех цилиндров.
Передний телескопический шарнир 8 состоит из нижнего рычага 54 и верхнего рычага с шарниром 55, закрепленном на каретке захвата 6. На верхнем рычаге выполнены ролики 56, в которых с помощью призматических направляющих установлен нижний рычаг54. К нижнему его шарниру 57 закреплен силовой цилиндр 9 клещей 10. Клещи 10 захвата 6 состоят из верхней и нижней губок 58, установленные в корпусе 14 клещей на осях и соединенные друг с другом зубчатым ; зацеплением (фиг. 8). Корпус 14 клещей установлен на передних концах скалок 13, которые проходят сквозь расточки в передней 11 и задней 12 крышек привода 9 клещей. Взаимодействие клещей 10 с цилиндром 9 осуществляется верхним рычагом губки 58, в который уперт регулировочный наконечник 59 штока 15 силового цилиндра 9 клещей 10. На штоке 15 между его торцом и наконечником 59 жестко закреплен толкатель 26. Собачка 38 снабжена штифтом 60. Задний подвес 7 верхним шарниром 61 закреплен в силовой цилиндр 9 клещей 10.
Модуль работает следующим образом.
При первичной ориентации листа в исходном положении клещи 10 силовыми цилиндрами 9 отведены в заднее крайнее положение и раскрыты. Толкатель 26 находится в заднем крайнем положении и регулируемый упор 28 верхнего ригеля 27 толкателя 26 смещает золотник 22 в заднее
крайнее положение, соединяя полости следящего цилиндра 17 со следящим золотником 23 и напорной магистралью (клапаном 51).
Вилка 41 находится в переднем крайнем положении, ее штифт 47 уперт в направляющие 40. Задний удлиненный конец вилки 44 своим V-образным проемом закреплен в корпусе 46 фиксатором 45. Ниж0 нийконец43 вилки41 сдвинут вперед на зуб 39 Г-образного рычага 32. Верхний конец 42 вилки 41 поднимает запирающую собачку 38, в результате освобождается штифт 36 рычага 32, и последний под действием пружины откидывается вверх по часовой стрелке.
При отсутствии воздействия со стороны двуплечего рычага 31 на рычаг 32 последний под воздействием пружины 24 золотника 23
0 через толкатель 49 смещает вперед до упора. При этом открывается максимальный проход следящего золотника 23 и следящий цилиндр 17 опускается в нижнее крайнее положение, перемещая в него весь захват,
5 который поворачивается в этом случае вокруг нижних шарниров переднего 8 и заднего 7 подвесов.
Для захвата листа с поиском его кромки включаются гидрораспределители 50 и штоки цилиндров 9 приводов клещей перемещается вперед на величину- 35 мм, необходимую для приведения системы поиска в рабочее положение, и останавливается в этом положении по командам конечных
5 выключателей (не показаны). При этом под воздействием пружины 16 перемещается вперед корпус 14 клещей 10. Вместе с корпусом 10 перемещаются все механизмы, закрепленные на нем. Удлиненный конец
0 вилки 44 удерживается фиксатором 45 неподвижно в корпусе 46. В результате вилка 41 смещается относительно корпуса 14 клещей назад в направляющих 40.
При этом верхний конец 42 вилки 41
5 освобождает собачку 38, и она опускается навстречу штифту 36. Нижний конец 43 вилки 41 захватывает зуб 39 рычага 32 и поворачивает рычаг 32 против часовой стрелки, переводя двуплечий рычаг 31 в положение
0 впереди клещей 10 под углом 45. Штифт 36 Г-образного рычага 32. перемещаясь в радиальном пазу 35 рычага 34, приподнимает собачку 38 и проходит за нее. Собачка проворачивается вниз и заклинивается на
5 штифте, объединяя в одно целое Г-образный рычаг 32 и двуплечий рычаг31 с поворотным рычагом 34, который через толкатель 49 воздействует на следящий золотник 23. При дальнейшем движении захватов 6 вместе с кареткой 5 в сторону листа
щупы захватов встречаются с кромкой листов в фактическом месте ее расположения у каждого захвата и под воздействием кромки отклоняются против часовой стрелки. В этом же направлении поворачивается рычаг 34, который толкателем 49 смещает следящий золотник назад, сжимая его пружину 24. Увеличение сопротивления в золотнике приводит к возрастанию давления в поршневой полости следящего силового цилиндра 17, что приводит к его ходу вверх, т.е. подъему клещей. Такое положение сохраняется до тех пор, пока кромка листа не минует задний закругленный конец 33 двуплечего рычага 31. В этом положении воздействие двуплечего рычага на золотник прекращается и движение клещей вверх прекращается, а кромка листа оказывается в зеве клещей.
Дальнейшее продвижение каретки 5 приводит к касанию кромки листа торцов клещей, которые продвигают лист до упоров координирующего устройства. По получению сигнала о приведении передней кромки листа к базовым упорам (не показаны) шток силового цилиндра 17 привода клещей 10 начинает движение вперед, а каретка 5 на такую же величину - назад. В результате корпус 14 клещей, клещи 10 и все механизмы, находящиеся на корпусе 14 клещей, оставаясь неподвижными относительно кромки листа, смещаются вперед относительно корпуса 46, и т.д. При этом вилка 41 смещается назад до упора торцом в толкатель, после чего происходит выдергивание удлиненного конца вилки 44 из-под фиксатора 45.
При упоре торцов скалок 13 в крышку 12 захватов происходит остановка корпуса 14 клещей и всех механизмов, связанных с ним, и продолжается движение штока 15, который, деформируя пружину 16, зажимает клещи на кромке листа.
Одновременно происходит смещение толкателя 26, закрепленного на штоке 15, что приводит к освобождению запирающего золотника 22, который под действием пружины 24 смещается вперед, запирая обе полости следящего силового цилиндра 17, что приводит к фиксации клещей на найденном уровне.
Этим же движением нижний ригель 29 толкателя 26, воздействуя на торец 48 вилки 11, смещает последнюю вперед. Вилка поднимает запирающую собачку 38, освобождая двуплечий рычаг 31, который под действием пружины отбрасывается назад, освобождая плоскость листа для штамповки. Все время, пока клещи зажаты, они фиксированы на уровне найденной кромки листа.
При отводе клещей от листа шток 15 цилиндра 9 начинает движение назад. При этом под действием пружины 16 вначале происходит раскрытие клещей 10 при неподвижном корпусе 14. В конце раскрытия клещей 10 толкатель 26 воздействует на запирающий золотник 22, который вновь соединяет следящий цилиндр 17 со следящим золотником 23 и напорной магистралью.
При освобождении двуплечего рычага, т.е. свободном следящем золотнике, происходит опускание клещей.
Дальнейшее движение штока 15 назад
5 приводит к отходу корпуса 14, в результате чего удлиненный конец вилки 41 входит в корпус 46 и становится под фиксатор 45. В итоге все механизмы оказываются в исходном состоянии,
0При повторных подходах каждого из захватов к листу в процессе штамповки работа происходит аналогично, исключая остановку клещей в промежуточном положении и противоположное движение клещей 10 и каретки 5, необходимые при первоначальной координации листа.
Модуль позволяет существенно снизить требования к исходному состоянию перерабатываемых листов, повысить надежность и
0 безаварийность работы модуля.
Формула изобретения Модуль для автоматизированной листовой штамповки, содержащий пресс, координатный стол, состоящий из тележки с
5 рольгангом и размещенной на ней подвижной перпендикулярно фронту пресса кареткой, снабженной по меньшей мере тремя захватами, выполненными в виде силовых цилиндров с горизонтально расположенными осями, установленных на каретке в шарнирных подвесах, передний из которых телескопический подпружиненный, корпуса, подвижно смонтированного на штоке силового цилиндра, и зажимных губок,
5 шарнирно закрепленных на корпусе с возможностью поворота в вертикальной плоскости и взаимодействия со штоком силового цилиндра, отличающийся тем, что, с целью расширения технологических возможностей путем штамповки из листов различных габаритов и конфигурации, каждый захват снабжен устройством слежения за расположением кромки листа, выполненным в виде следящего силового
5 цилиндра, вертикально закрепленного на переднем конце силового цилиндра и шарнирно связанного с телескопическим подвесом, запирающего золотника, закрепленного на корпусе с возможностью взаимодействия со штоком силового цилиндра, следящего золотника, установленного там же и соединенного с запирающим золотником и со следящим силовым цилиндром, двуплечего рычага для взаимодействия с листом, шарнирно закрепленного при помощи оси на корпусе с возможностью поворота в вертикальной плоскости, нижний конец которого расположен на уровне между зажимными губками, а его верхний конец расположен над зажимными губками под углом 45 к оси захвата, рычага с радиальным пазом, установленного на оси двуплечего рычага с возможностью поворота в вертикальной плоскости и взаимодействия
со следящим золотником, штифта, закрепленного на двуплечем рычаге и расположенного в радиальном пазу рычага, подпружиненной запирающей собачки, шарнирно закрепленной на рычаге с возможностью поворота в вертикальной плоскости и взаимодействия со штифтом двуплечего рычага, вилки, подвижно установленной на корпусе с возможностью взаимодействия со штоком силового цилиндра, с собачкой и нижним концом двуплечего рычага, и подпружиненного фиксатора, закрепленного на силовом цилиндре с возможностью взаимодействия с вилкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль для автоматизированной безраскройной листовой штамповки | 1987 |
|
SU1505641A1 |
| Модуль для автоматизированной безраскройной листовой штамповки | 1987 |
|
SU1484412A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| Машина для взъерошивания края верха обувной заготовки | 1976 |
|
SU1223829A3 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| Устройство для базирования листов | 1980 |
|
SU904844A1 |
Изобретение относится к обработке металлов давлением, в частности к холодной листовой штамповке, и может быть использовано в различных отраслях промышленности. Цель - расширение технологических возможностей путем штамповки из листов различных габаритов и конфигурации. Модуль для автоматизированной безраскройной штамповки содержит кривошипный пресс с установленным на нем штампом, координатный стол и другое вспомогательное оборудование. На тележке каретки координатного стола закреплены захваты, снабженные устройством слежения за расположением кромки листа. Устройство слежения имеет следящий силовой цилиндр, запирающий золотник, расположенный с возможностью взаимодействия со штоком силового цилиндра, и рычаги, установленные с возможностью взаимодействия как с листом, так и с золотником. Модуль позволяет снизить требования к исходному состоянию перерабатываемых листов. 10 ил.СОсИзобретение относится к холодной листовой штамповке и может быть использовано в различных отраслях промышленности.Известен модуль для автоматизированной безраскройной листовой штамповки, включающий в себя координатный стол, состоящий из тележки с рольгангом и размещенной на ней подвижной перпендикулярно фронту пресса кареткой с тремя захватами в виде силовых цилиндров с горизонтально расположенными осями и установленных на каретке в шарнирных подвесах, передний из них выполнен телескопическим и подпружиненным, корпуса, подвижно смонтированного на штоке силового цилиндра. Кроме того, на корпусе закреплены шарнирно зажимные губки с возможностью поворота в вертикальной плоскости и взаимодействия со штоком силового цилиндра.Недостатком известного модуля является сложность захвата кромки листа при егоисходной ориентации, так как допускается большая коробоватость и волнистость листов по вертикали, а также возникает деформация при штамповке. Все это снижает технологические возможности модуля.Цель изобретения - расширение технологических возможностей путем штамповки из листов различных габаритов и конфигурации.Поставленная цель достигается тем, что каждый захват снабжен устройством слежения за расположением кромки листа, выпол- ненным в виде следящего силового цилиндра, вертикально закрепленного на переднем конце силового цилиндра и шарнирно связанного с телесколическим подвесом, запирающего золотника, закрепленного на корпусе с возможностью взаимодействия со штоком силового цилиндра, следящего золотника, установленного там же и соединенного с запирающим золотни-^о00:^i^ "Ч ^
Jt-II |Г
-J СФ Фаг.
DO
Or,
«2
;о
фиг.З
20
1708477 ВидА
/Э
Фиг.
Фиг. 5
Фиг.1
| Модуль для автоматизированной безраскройной листовой штамповки | 1987 |
|
SU1505641A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
