4
СО
СП
сд сд
О5
Изобретение относится к дистанционному управлению запорными устройствами и может быть использовано в энергомашиностроительной, химической и газоперерабатывающей промышленности для перекрытия агрессивного и высокотемпературного газового потока.
Цель изобретения - повышение надежности системы управления.
На фиг. 1 и 2 представлены пневматические схемы управления арматурой.
Система управления арматурой (фиг. 1) состоит из пневматического приводного механизма 1 с двумя полостями 2 и 3, блока 4 управления, связанного через двух- позиционный распределитель 5, имеющий канал 6 сброса, каналом 7 управления с полостью 3 пневматического приводного механизма 1, содержащего корпус 8, в котором расположен поршень 9 с уплотнителем 10 и штоком 11 с комбинированным уплотнением 13 (не показано), на котором закреплен запорный элемент 12, регулировочную пружину 14, расположенную в поршневой полости 2. Поршневая полость 2 пневматического приводного механизма 1 снабжена двумя каналами - защитным 15, соединяющим ее с каналом 7 управления, и отводным 16, при этом в защитном 15 и отводном 16 каналах установлены постоянные дроссели 17 и 18, причем проводимость Дросселя 17 меньше, чем проводимость дросселя 18, и канал 6 сброса распределителя 5 соединен с отводным каналом 16.
Канал 6 сброса распределителя 5 соединен с отводным каналом 16 и трубопроводом 19 с вентиляционным каналом 20.
Канал 6 сброса распределителя 23 соединен с отводным каналом 16 и трубопроводом 19 с соплом 21, расположенным в непосредственной близости от корпуса 8 приводного механизма- 1 и направленным на него. Перед соплом установлен воздушный эжектор 22 (фиг. 2).
В системе управления арматурой (фиг. 2) распределитель 23 - трехпози- ционный, причем в средней позиции в канале подвода установлен постоянный дроссель 24.
Система управления арматурой (фиг. 1) работаег следующим образом.
Входной электрический сигнал поступает в блок 4 управления, который подает команду на переключение распределителя 5 с электропневматическим односторонним управлением, к которому подведено давление питания. Происходит переключение распределителя 5, канал 7 соединяется с магистралью питания. Сжатый воздух из магистрали питания по канйлу 7 поступает в полость 3 пневматического приводного механизма 1, преодолевает сопротивление пружины 14, установленной в полости 2 пневматического приводного механизма 1. Запорный элемент 12 поднимается и дает возможность беспрепятственно проходить по магистраль
0
5
0
5
0
ному трубопроводу агрессивному и высокотемпературному газовому потоку. Одновременно сжатый воздух из магистрали питания через каналы 7 и 15 и постоянный дроссель 17 поступает в полость 2 пневматического приводного механизма 1, создает в ней избыточное давление, так как в отводном канале 16, связывающем эту полость
2с трубопроводом 19, установлен второй постоянный дроссель 18, чем обеспечивается создание в полости 2 приводного механизма 1 такого избыточного давления, которое меньше, чем давление, подаваемое в полость
3пневматического приводного механизма I. Избыточное давление, создаваемое в полости 2, препятствует перетечкам между полостя ли 2 и 3, но не препятствует перемещению поршня 9.
Через отводной канал 16 по трубопроводу 19 воздух из полости 2 отводится в вентиляционный канал 20.
При поступлении команды на возврат распределителя 5 с электропневматическим односторонним управлением в исходное положение канал 7 соединяет полость 3 пнев.ма- тического приводного механизма 1 с каналом 6 сброса распределителя 5. Происходит сброс давления в полости 3 пневматического приводного механизма 1, и его поршень 9 со щтоком 11, на котором закреплен запорный элемент 12, движется вниз, закрывая свободный проход агрессивному и высокотемпературному газовому потоку, проходящему по магистральному трубопроводу. В этом положении распределителя 5 отработанный сжатый воздух через канал 6 сброса распределителя и трубопровод 19 отводится в вентиляционный канал 20. Таким образом, полностью исключается попадание в окружающую среду (рабочее помещение) агрессивного высокотемпературного газового потока. При необходимости вентиляционный канал может быть соединен с герметичным воздухосборником.
В закрытом положении запорного элемента 12 агрессивная высокотемпературная среда, находящаяся со стороны ее отвода в магистральном трубопроводе, имеет неболь5 njoe избыточное давление, а в полостях 2 и 3 пневматического приводного механизма 1 устанавливается давление, равное атмосферному. В этом случае происходят утечки агрессивной и высокотемпературной газовой среды через комбинированное уплотнение што0 ка 11 через полости 2 и 3 пневматического приводного механизма 1 по каналам 6, 7, 15, 16 и трубопроводу 19 в вентиляционный канал 20. В открытом положении запорного элемента 12 эти утечки в значительной мере предотвращают избыточное
5 давление в полостях 2 и 3 , пневматического приводного механизма 1.
Для системы управления арматурой, производящей распределение потоков высокотемпературной неагрессивной и нетоксичной среды (фиг. 2), отработанный в пневматическом приводном механизме 1 воздух, температура которого значительно ниже температуры потока, проходящго по магистральному трубопроводу через канал 6 сброса, отводной канал 15, трубопровод 19 и сопло 21, расположенное в непосредственной близости от корпуса 8 пневматического приводного механизма 1, вытекает в атмосфеФормула изобретения
1. Система управления арматурой, состоящая из блока управления, связанного через г распределитель, имеющий каналы сброса и управления, с пневматическим приводным механизмом, содержащим корпус, в котором располжен поршень с уплотнением и шток с комбинированным уплотнением, на копце которого закреплен запорный элемент, отли15
ру, омывая корпус 8, т. е. производит его Ю чающаяся тем, что, с целью повышения принудительное охлаждение, тем самым, улучшая условия работы всего приводного механизма.
Для увеличения расхода воздуха, поступающего на охлаждение корпуса 8 через сопло 21, перед соплом 21 установлен эжектор 22, в котором происходит эжекция воздуха из окружающей среды воздухом, отработанным в пневматическом приводном механизме 1. Следовательно, расход воздуха, выходящего из сопла 21, увеличивается.
Отличие в работе системы управления арматурой с трехпозиционным распределителем 23, в котором в средней позиции в канале подвода установлен постоянный дроссель 24 (фиг. 2), заключается в том, что при закрытом запорном элементе 12, находящемся в крайнем нижнем положении под действием пружины 14, в полостях 2 и 3 пневматического приводного механизма 1 благодаря наличию постоянного дросселя 24
надежности, поршневая полость пневмопри- водного механизма дополнительно снабжена двумя каналами - защитным, соединяющим его с каналом управления распределителя, и отводным, при этом в обоих каналах установлены постоянные дроссели, причем проводимость дросселя, установленного в защитном канале меньще, чем проводимость дросселя, установленного в отводном канале, кроме того, отводной канал сое- 20 динен с каналом сброса распределителя.
2.Система по п. 1, отличающаяся тем, что она снабжена вентиляционным каналом, соединенным трубопроводом с каналом сброса распределителя и отводным каналом приводного механизма.
3.Система по п. 1, отличающаяся тем, что распределитель выполнен трехпозиционным, в средней позиции канала подвода установлен постоянный дроссель.
4.Система по п. 1, отличающаяся тем.
25
устанавливается постоянное давление, мень- зоч ° снабжена последовательно установшее, чем давление срабатывания пневматического приводного механизма I, препятствующее утечкам высокотемпературного агрессивного газового потока.
Элен три чески и в Мин о и сигнал
ленными соплом, направленным в сторону приводного механизма, и эжектором, подключенным к каналу сброса распределителя и отводному каналу приводного механизма.
Формула изобретения
1. Система управления арматурой, состоящая из блока управления, связанного через распределитель, имеющий каналы сброса и управления, с пневматическим приводным механизмом, содержащим корпус, в котором располжен поршень с уплотнением и шток с комбинированным уплотнением, на копце которого закреплен запорный элемент, отличающаяся тем, что, с целью повышения
чающаяся тем, что, с целью повышения
надежности, поршневая полость пневмопри- водного механизма дополнительно снабжена двумя каналами - защитным, соединяющим его с каналом управления распределителя, и отводным, при этом в обоих каналах установлены постоянные дроссели, причем проводимость дросселя, установленного в защитном канале меньще, чем проводимость дросселя, установленного в отводном канале, кроме того, отводной канал сое- динен с каналом сброса распределителя.
2.Система по п. 1, отличающаяся тем, что она снабжена вентиляционным каналом, соединенным трубопроводом с каналом сброса распределителя и отводным каналом приводного механизма.
3.Система по п. 1, отличающаяся тем, что распределитель выполнен трехпозиционным, в средней позиции канала подвода установлен постоянный дроссель.
4.Система по п. 1, отличающаяся тем.
ленными соплом, направленным в сторону приводного механизма, и эжектором, подключенным к каналу сброса распределителя и отводному каналу приводного механизма.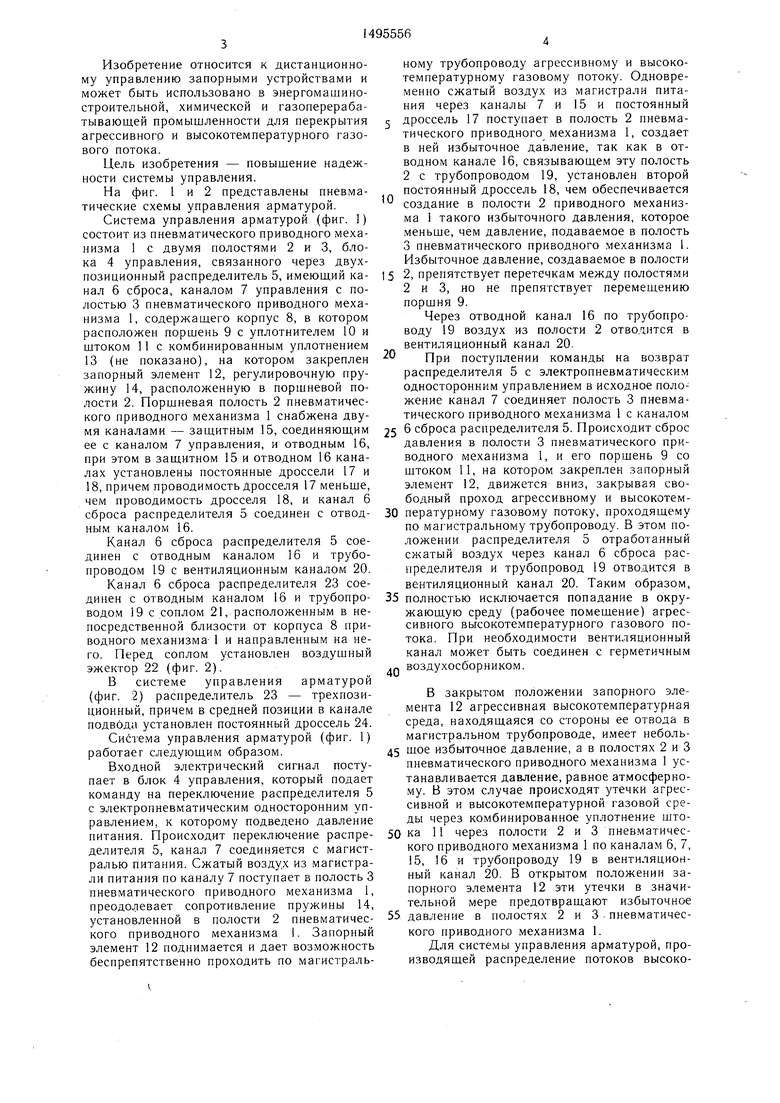
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2007 |
|
RU2355014C1 |
| Модульная система подготовки и распределения газов | 2023 |
|
RU2817593C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРОЙ КУСТА СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2453686C1 |
| Пневмогидравлический привод | 1982 |
|
SU1081371A1 |
| Газопоршневой двигатель электроагрегата | 2023 |
|
RU2802562C1 |
| ЯДЕРНАЯ УСТАНОВКА С ВЕНТИЛЯЦИОННОЙ СИСТЕМОЙ | 2018 |
|
RU2758899C2 |
| СПОСОБ ДИСПЕРГИРОВАНИЯ ЖИДКОСТИ В СТРУЕ ДИСПЕРСИОННОЙ ВОЗДУШНОЙ СРЕДЫ В АЭРОЗОЛЬ И МОБИЛЬНЫЙ ГЕНЕРАТОР АЭРОЗОЛЯ РЕГУЛИРУЕМОЙ МНОГОМЕРНЫМ ВОЗДЕЙСТВИЕМ ДИСПЕРСНОСТИ, СМЕСИТЕЛЬ, КЛАПАН СОГЛАСОВАНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2489201C2 |
| ПУЛЬСАЦИОННЫЙ КЛАПАННЫЙ ПОГРУЖНОЙ НАСОС | 2007 |
|
RU2339101C1 |
| ПАТРОН КЛАПАНА ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ГАЗА | 1991 |
|
RU2027931C1 |
| Пневматическое устройство управления | 1977 |
|
SU631866A1 |
Изобретение может быть использовано для перекрытия агрессивного и высокотемпературного газового потока. Цель изобретения - повышение надежности системы управления арматурой. Блок 4 управления связан через распределитель (Р), имеющий каналы 6, 7 сброса и управления, с пневматическим приводным механизмом (М) 1. В корпусе 8 М 1 расположены поршень 9 с уплотнением 10 и шток 11 с комбинированным уплотнением, на конце которого закреплен запорный элемент 12. Поршневая полость 2 М 1 снабжена защитным и отводным каналами (К) 15, 16. К 15 соединяет полость 2 с К 7 управления Р. В К 15, 16 установлены дроссели 17, 18, причем проводимость дросселя 17 меньше проводимости дросселя 18. К 16 соединен с К 6 сброса Р. Вентиляционный К соединен трубопроводом 19 с К 6, 16. Р 23 выполнен трехпозиционным, в средней позиции К подвода которого установлен постоянный дроссель 24. Сопло 21, направленное в сторону М 1, и эжектор 22 установлены последовательно и подключены к К 6, 16. Дроссель 24 обеспечивает постоянное давление в М 1, которое меньше, чем давление срабатывания М 1, препятствующее утечкам газового потока. 3 з.п. ф-лы. 2 ил.
| Система дистанционного управления арматурой | 1978 |
|
SU752100A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
