Изобретение относится к трубопроводному транспорту и может быть использовано для поиска и контроля движущихся в трубопроводе объектов.
Цель изобретения - повьш1ение достоверности определения местоположения объекта за счет изменения длины волны ответного сигнала.
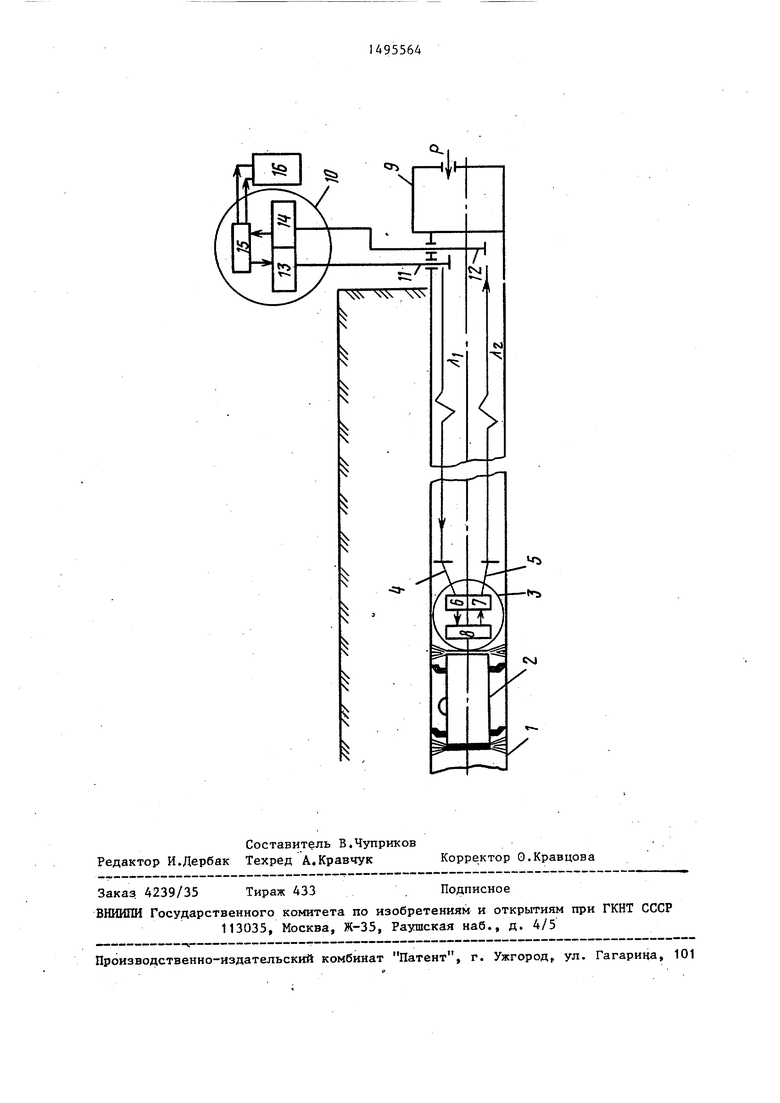
На чертеже приведена блок-схема определения местоположения объекта в трубопроводе.
Блок-схема содержит трубопровод 1, находящийся внутри него объект 2, например очистное устройство, зонд- ответчик 3, содержащий приемную 4 и передающую 5 антенны, приемник 6, передатчик 7 и блок 8 управления, камеру 9 запуска с отверстием для подачи сжатого газа Р, в зоне которой расположена приемопередающая станция 10,
содержащая передающую 11 и приемную 12 антенны, введенные внутрь трубопровода 1 , передатчик 13; приемник 14, блок 15 управлениями вычислительный блок 16.
Способ реализуют следующим образом.
. В камеру 9 запуска устанавливают очистное устройство 2 и зонд-ответ- чик 3. Путем подачи сжатого газа через отверстие камеры 9 запуска обеспечивают перемещение объекта внутри трубопровода I. В силу скопле ния большого количества мусора, наличия крутых поворотов и тому подобное очистное устройство застревает в трубопроводе. При установлении факта застревания устройства 2 в трубопроводе 1 , оператор включает блок 15 управления приемопередающей станции
со
СП
сл
о:
4
31А9
10, который одновременно запускает передатчик 13 и таймер вычислительного блока 16. Через антенну 11 передатчик 13 излучает запрашивающий ра.- диосигнал прямоугольной формы длиной волны TV.. Достигнув антенны 4 приемника 6, настроенного на волну/Д, , радиосигнал посьшается на блок 8 управления, который преобразует его в сигнал запуска для передатчика 7. Последний формирует ответный радиосигнал прямоугольной формы длиной волны «л2,5 который излучается через антенну 5. Ответный радиосигнал, достигнув антенны 12 приёмопередающей станции 10, через приемник 14, настроенный на волну -Д, посьшается на блок 15 управления. Последний преобразует его в сигнал выключения тай- мера вычислительного блока 16 и дает команду на вычисление расстояния от камеры 9 запуска до застрявшего объекта 2:
С. At
. ,
L
где С - скорость распространения радиоволн;
u.t - время таймера.
Точность определения расстояния до застрявшего объекта зависит от длительности переднего фронта сигнала запроса и ответа € и вычисляется по формуле
г (l,34-0,8)d
р
Q 5 0
0
5
где - диаметр трубопровода.
Например, для трубопровода диаметром 1020 мм оптимальная длина волн лежит в преде лах Д 1 ,)-0,9,.м, поэтому целесообразно, выбирать А, 1,0 м, а 0,9 м,
Длина волн для сигналов запроса и ответавыбрана различной для того, чтобы исключить ложное срабатьшание приемника приемопередающей станции из-за отраженньлх радиосигналов от неровностей внутренней поверхности трубы, поворотов, сварочных щвов и т.п.
При использовании предлагаемого способа целесообразно зонд-ответчик запускать в трубопровод отдельно от очистного устройства, при этом можно использовать значительно меньшие перепады давления сжатого газау а следовательно, и скорости его передвижения в трубе, так как по технологии очистки трубопровода необходимо, чтобы скорость очистного устройства была 10-20 м/с, что может npHBecVH к выходу из строя зонда- ответчика. Используя автономный движущийся со скоростью -1-4 м/с зонд- ответчик, запуск которого осуществляется после остановки очистного устройства J можно повысить надежность всей системы в целом.
Формула изобретения

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО МАРКИРОВКИ ОБЪЕКТОВ ПРИ ПОМОЩИ ЭЛЕКТРОННОГО НОМЕРА-ПЛОМБЫ, ОСУЩЕСТВЛЯЮЩЕЙ ИНФОРМАЦИОННЫЙ ОБМЕН СО СЧИТЫВАЮЩИМ УСТРОЙСТВОМ С ИСПОЛЬЗОВАНИЕМ СЕКРЕТНОГО КОДИРОВАНИЯ НА ОСНОВЕ АСИММЕТРИЧНЫХ КЛЮЧЕЙ | 2009 |
|
RU2408896C1 |
| НАЗЕМНЫЙ РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК ПЕРЕДВИЖНОГО КОМПЛЕКСА | 2009 |
|
RU2439610C2 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2216047C2 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2492523C2 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ БОРТОВОЙ МОНОИМПУЛЬСНОЙ РЛС И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2268478C2 |
| САМОЛЕТНЫЙ ОТВЕТЧИК | 2007 |
|
RU2338221C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
Изобретение позволяет повысить достоверность определения местоположения объекта в трубопроводе за счет изменения длины ответного сигнала. Объект облучают электромагнитным сигналом, направленным от приемопередающей станции. При приеме этого сигнала на объекте формируют ответный электромагнитный сигнал, который принимают на станции. По времени прохождения обоих сигналов определяют расстояние до объекта. Ответный сигнал формируют длиной волны, отличающейся от длины волны облучающего сигнала. 1 ил.
UL i 2С С.
Например, для длительности переднего фронта в пределах 1 мкс точность определения составляет ±660 м.
Таким образом, зона поиска значительно сужается от нескольких километров до метров. Локализация поиска может осуществляться с помощью прибора точного обнаружения.
Трубопровод является волноводом, поэтому в нем могут распространяться волны только длиной , меньшей удвоенного диаметра трубопровода Длины волн, для которых потери в волноводах-трубах мишшальны, лежат в области
Способ определения местоположения
объекта в трубопроводе, заключающийся в том, что объект облучают электромагнитным сигналом, направленным от приемопередающей станции, при приеме которого на объекте формируют;ответный электромагнитный сигнал, который принимают на приемопередающей станции, и по времени прохождения обоих сигналов определяют стояние до объекта,, о т л и ч а ющ и и с я тем, что, с целью повышения достоверности определения мес тоположения объекта, ответный сигнал формируют длиной волны, отличающейся от длины волны облучающег о сигйала.
| Gas Engineeting and Management | |||
| February, 1984. |
