4
СО
сд
Oi
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1987 |
|
SU1495639A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1522408A1 |
| Многоканальный преобразователь угол-временной интервал | 1989 |
|
SU1716603A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1709269A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1697267A1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1656682A1 |
| Двухотсчетный преобразователь угол-код | 1986 |
|
SU1403372A1 |
Изобретение относится к измерительной технике и может быть использовано в системах числового программного управления металлобрабатывающими станками. С целью повышения точности путем исключения динамической погрешности интерполирования в устройство, содержащее синусно-косинусный датчик 1, компаратор 2, интерполятор 3, счетчик 4, формирователь 5 счетных импульсов, шину 6 управления, компаратор 7, регистры 8,9, введены одновибраторы 10,11. Для приведения в соответствие кода в регистре 9 действительному коду, соответствующему величине перемещения в момент смены кода в регистре 8 старших разрядов, одновибраторы 10,11 вырабатывают импульсы, устанавливающие регистр 9 в "0" или "1", в зависимости от направления перемещения. 2 ил.
Фиг Л
Изобретение относится к измерительной технике и может быть использовано в системах числового программного управления металлообрабатывающими станками.
к недостоверности выходного кода устройства.
Для приведения в соответствие кода в регистре 9 импульсами с выхода одновибЦель изобретения - повышение точности с раторов 10 и 11 регистр 9 устанавлипутем исключения динамической погрешности интерполирования.
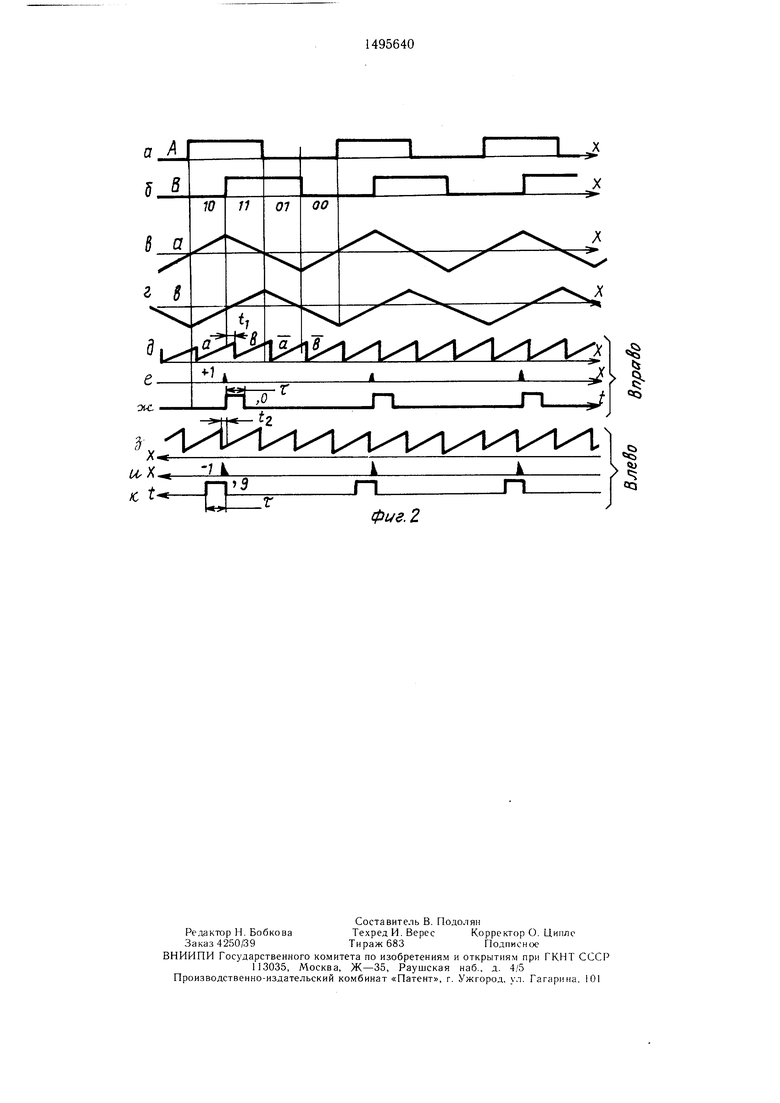
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - временные диаграммы его работы.
вается в нулевое (фиг. 2ж) или единичное (фиг. 2к) состояние при счете периодов вправо или влево соответственно. Кратковременная погрешность, вносимая за счет принудительной коррекции, существенУстройство содержит синусно-косинусный но меньшее неправильного отсчета в момен- датчик 1, компаратор 2, интерполятор 3,ты времени t и tj. (фиг. 2д, з).
Формула изобретения Устройство для измерения перемещений.
входам формирователя 5 счетных импульсов, интерполятора 3 и регистра 9. Выходы формирователя 5 счетных импульсов подключены к входам счетчика 4, выход которого подключен к входу регистра 8. Выходы формирователя 5 счетных импульсов через одновибраторы 10 и 11 подключены к входам установки и сброса регистра 9.
20
счетчик 4, формирователь 5 счетных импульсов, шину 6 управления, компаратор 7, регистры 8 и 9, одновибраторы 10 и 11.
Выходы синусно-косинусного датчика 1 15 содержащее синусно-косинусный датчик, ин- через компараторы 2 и 7 подключены к терполятор, формирователь счетных импульсов, счетик и два регистра, первый и второй выходы синусно-косинусного датчика подключены соответственно к первому и второму входам .интерполятора, выход которого подключен к первому входу данных первого регистра, первый и второй выходы формирователя счетных импульсов подключены СОО-. jeTCTBeHHO к суммирующему и вычитающему входам счетчика, выход которого
Устройство работает следующим образом. 25 подключен к второму входу данных второго На выходе синусно-косинусного датчика 1регистра, отличающееся тем, что с целью
формируются квадратурные сигналы повышения точности, в него введены два (фиг. (фиг. 2s, г), которые компаратора- компаратора, два одновибратора и шина ми 2 и 7 преобразуются в последователь- управления, интерполятор выполнен с ности импульсов (фиг. 2а, б), по фронтам третьим и четвертым входами, первый ре- которых формирователь 5 счетных импуль- 30 гистр - с входами установки, сбро са и сов вырабатывает импульсы при движе- управления, а второй регистр - с вхо- нии вправо (фиг. 2е) и влево (фиг. 2м). дом управления, первый и второй выходы Количество периодов сигналов синусно- синусно-косинусного датчика через первый косинусного датчика 1 подсчитывается счет- и второй компараторы подключены соот- чиком 4 и по управляющему сигналу на ветственно к первому и второму входам шине управления записывается в регистр 8. 35 формирователя счетных импульсов, к тре- В пределах одного периода измерение тьему и четвертому входам интерполятора производится с использованием интерполято- и к второму и третьему входам данных ра 3, в котором формируются сигналы, первого регистра, первый и второй выходы при движении вправо (фиг. 2д) при дви- формирователя счетных импульсов через жении влево (фиг. 2з). В промежутках Q первый и второй одновибратор подключены времени ti и t2 преобразуемое напряжение соответственно к входам сброса и установ- и выходной код интерполятора 3 из-за ки первого регистра, а шина управления ограниченного быстродействия не соответ- подключена к входам управления первого ствует состоянию счетчика 4, что приводит и второго регистров.
к недостоверности выходного кода устройства.
Для приведения в соответствие кода в регистре 9 импульсами с выхода одновиб раторов 10 и 11 регистр 9 устанавливается в нулевое (фиг. 2ж) или единичное (фиг. 2к) состояние при счете периодов вправо или влево соответственно. Кратковременная погрешность, вносимая за счет принудительной коррекции, существенно меньшее неправильного отсчета в момен- ты времени t и tj. (фиг. 2д, з).
ote
х
/с t
JPlXx x ixnxgx ixnxixn
- kki
ГТ15nn
и
фLf8.Z
фLf8.Z
| Широкопредельный цифровой фазометр | 1983 |
|
SU1128189A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещений | 1983 |
|
SU1204918A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
