Изобретение относится к электротехнике и может быть использовано в системах автоматического управления, в частности в низкоскоростных следящих системах с моментными двигателями.
Цель изобретения - повьшение быстродействия электродвигателя путем увеличения величины электромагнитного момента.
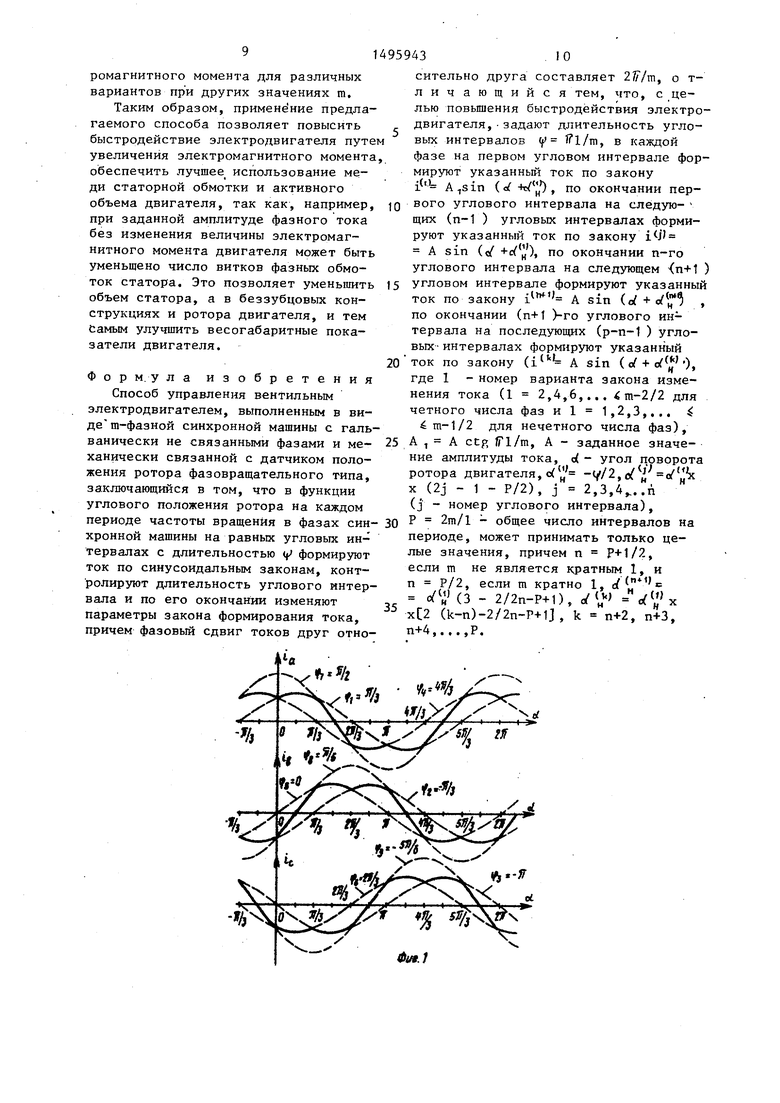
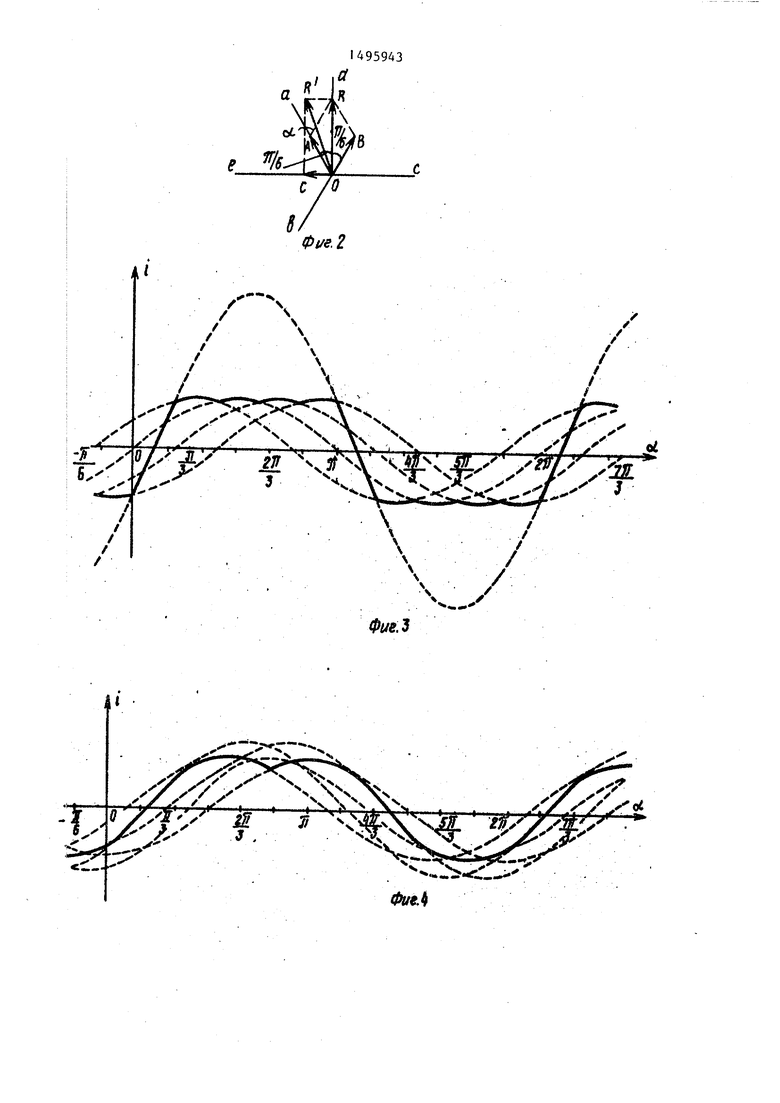
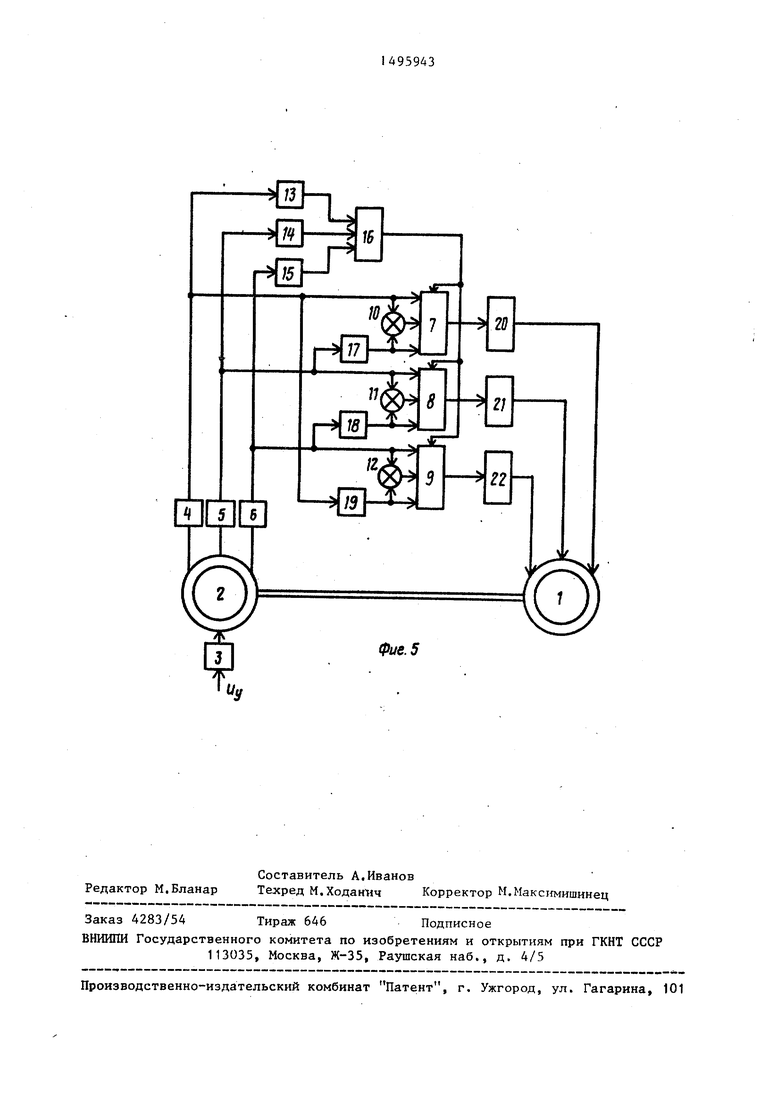
На фиг.1 изображены осциллограммы токов в фазах якорной обмотки трехфазного двигателя в функции угла поворота ротора; на фиг.2 - вектора намагничивающих сил якорной обмотки; на фиг.З и 4 - осциллограммы тока одной фазы пятифазного двигателя для первого и второго варианта закона изменения тока соответственно; на фиг.5- функциональная схема электропривода.
реализующего предлагаемый способ управления .
Электропривод (фиг.5)содержит вентильный электродвигатель 1, на валу которого установлен датчик.2 положения, у которого обмотки возбуждения соединены с выходом модулятора 3 на вход которого подается сигнал управления и , а вторичные обмотки через фазочувствительные вьшрямите- ли 4-6 соответственно соединены с первыми входами блоков 7-9 коммутации и сумматоров 10-12, а также с входами пороговых элементов 13-15. Последние соединены выходами с первым, вторым и третьим входами логического элемента ИЛИ 16,у которой выход подключен к управляющим входам блоков 7-9 коммутации, вторые входы которых соединены с выходами сумматоров 10-12, .
СО
ел со
и
00
Последние соединены своими вторыми входами с выходами инвертирующих блоков 17-19|ВХОды которых подключены соответственно к выходам фазочувст- вительных выпрямителей 5,6,4. Выходы блоков 7-9 коммутации соединены с входами усилителей 20-22 тока, подклю ченных к фазам двигателя 1.
Способ осуществляют следующим образом,
Токи в фазах двигателя 1 формируются при помощи усилителей 20-22 тока, связанных входами с выходами соответствующих блоков 7-9 коммутации причем закон изменения тока для каждой фазы задается выходным сигналом соответствующего блока коммутации.
При вращении ротора двигателя 1 напряжения на выходах фазочувстви- тельных выпрямителей 4-6 изменяются по синусоидальному закону, причем эти синусоиды сдвинуты по фазе друг относительно друга на угол (им соответствуют синусоиды с фазовым сдвигом 4- W/3, 4-2 - 1Г/3 я -ff, фиг.1) Эти синусоидальные сигналы являются исходными для получения требуемых законов изменения тока на каждом из шести угловых интервалов,, При этом длительность угловых интервалов контролируется пороговыми элементами 13-15, связанными вьпсодами с входами логического элемента ИЛИ 16. Каждый из пороговых элементов выдает 1-пу1пульс при переходе через ноль выходной синусоиды связанного с ним фазочувст- вительного выпрямителя.
Таки, образом, по окончании каждого угло;гого интервала длительность f/3 на выходе логического элемента ИЛИ 16 появляется импульс, поступающий на управля1ощие входы блока ; 7-9 коммутации. При этом выход каждого из блоков коммутируется к одному из трех его входов, на которые подаются синусоидальные сиг.- 1Ы требуемой амплитуды и фазы. Для получения требуемых синусоидальных сигналов выходные сигналы фазочувствитель- иых выпрямителей 4-6 подаются на первые входы блоков 7-9 коммутации, на первые входы сумматоров 10-12, а та1сже на входы инвертирующих блоков 19-18, с выхода которых инвертированные сигналы (фиг,1, синусоиды с (fj , tf -4 /Г/З и ) поступают на третьи входы соответственно блоков 9,7 и 8 коммутации, на вторые
0
5
входы сумматоров 12,10 и 11, где происходит сложение этих сигналов с выходными сигналами фазочувствитель- ных выпрямителей 6,4,5 и результирующие сигналы синусоиды с Ч д -5 |Г/6, -f /Г/2 и ifg- ff/d фиг.1) подаются cor ответственно на вторые входы блоков 9,7 и 8 коммутации.
При поступлении на управляющие входы .блоков 7-9 коммутации импульсов с выхода логического элемента ИЛИ 16 в каждом из этих блоков происходит поочередное подключение входной шины связанного с ним усилителя тока к каждой из трех входных шин блока коммутации. Причем в любой момент времени входные шины усилителей 20-22 тока подключены к различным входам блоков 7-9 коммутации. Например, если на первом угловом интервале (of 0- If/3) вход усилителя 10 подключен к первому входу блока 7, то вход усилителя 21 подключен к второму входу блока 8, а вход усилителя 22 - к третьему входу блока 9, В результате на входе усилителя 20 имеется синусоидальный сигнал, с фазовым сдвигом С((фиг,1), на входе усилителя 2 i синусоидальный
0 сигнал с фазовым сдвигом t , а на входе усилителя 22 - сигнал с cfg , По окончании первого интервала о/ f/3, после прохода импульса с выхода схемы ИЛИ 16, на втором интервале усилитель 20 подключен к второму входу блока .7, усилителья 21 - к третьему входу блока 8, а усилитель 22 - к первому входу блока 9, В этом случае закон изменения сигнала па входе усилителя 20 соответствует синусоиде с входе усилителя 21 - синусоида с (/j., а на входе усилителя 22 - синусоида с i/, В дальнейшем коммутация происходит аналогичным образом, ,
Таким образом формируются входные (задающие) сигналы усилителя 20-22 тока, В соответствии с этими сигналами на каждом угловом интервале усилителя 20-22 тока формируют в фазах двигателя ток по закону, определяемому способом управления. Этим обеспечивается равномерное вращение результирующего вектора намагничивающей силы (н,с,) в функции углового положения ротора, при этом угол между продольной осью ротора и результирующим вектором н.с, определяется установкой датчика положения на валу двигателя.
5
0
5
5
Величина момента, развиваемого двигателей, регулируется в пределах рабочей зоны значением управляющего сигнала Uy, поступающего на вход мо- с дулятора 3, Этот сигнал задает амплитуду выходных синусоид фазочувстви- тельных вьтрямителей 4-6, а следовательно, амплитуды синусоидальных сигналов, используемых для формирования 10 требуемых законов изменения фазных токов и, соответственно, величину результирующего вектора н.с,, при этом, поскольку в фазах двигателя формируются Токи по новым законам, соот-15 ветствующим предлагаемому способу управления, для любых значений уп- |равляющего сигнала величина результирующего вектора н.с. двигателя выше, чем в известных системах частотно- токового управления.
Рассмотрим возможность повышения величины электромагнитного момента на примере трехфазного двигателя с
OR ;
го вектора н.с, UR; величина которого составляет 1,732 величины амплитуд ного значения, н.с, каждой фазы на интервале (- // /3,0) необходимо изменять фазные точки по закону
i А cos
20
(d -t- У/6), (4) i А cos (e + Г/6) , i -V3A sin ( + jr/6),
где (,ic мгновенные значения токов j A - заданное амплитудное
значение токов,.
В точке о О векторы ОА, ОВ и. ОС имеют одинаковые значения
lOAl |ОВ1 (ОС V3/2 , (5),
а вектор OR совпадает с осью а. На следующем интервале (О, 3) система ортогональных координат образуется фазами а и с, результирующий вектор
обмотками а, в и с (фиг, 2) при сохра-25 , (геометрическая сумма векто35
нении равномерного вращения поля,Вариант закона изменения токов в трехфазном двигателе может быть только , так как для нечетного числа фаз га 1 1,2,3,,., сга-1/2. Предпо- 30 ложим, что ток в фазе С отсутствует, а в фазах а ив протекают разно- полярные токи, соответствующие заданным амплитудным значениям. Распределение на; 1агничивающих сил соответствует векторам ОА и ОВ, Результирующий вектор OR равен геометрической сумме векторов ОА и ОВ. Если принять абсолютные значения вектр- и ОВ,равными 1, т.е, |ОА1 10В| 1, то
1бк1 2 cos ТГ/б УЗ 1,732 (1)
Рассмотрим ортогональную систему координат d, е и примем в качестве составляющих вектора OR векторы OR и ОС, которые для равномерного перемещения вектора OR на угловом интервале (- If/3,0) должны изменяться по закону
ров ОА и ОС) служит первой составляю- щей вектора OR , и фазов Ь, образующей вторую составляющую (вектор ОВ), В этом случае точки изменяются следую щим образом
1д А cos (о - /6)i . (6) Ц УЗ А sin (d( - /6) ; ic -А cos (о/ - /6) ,
Аналогично для интервала ( F/3,
40
2 /3) имеют
igf т2 A cos 0 ; (7) i A sin of ;
ic A sino . В дальнейшем, на следующих трех интервалах второго полупериода законы изменения фазных токов (4), (6),(7) повторяются. Таким образом, для обеспечения равномерного перемещения результирующего вектора OR с частотрй вращения со ( о tJ t, где t - время) . необходимо в фазах статора на каяздом полупериоде частоты вращения формировать токи на трех угловых интервалах длительностью Г/3 по законам (4), (6), (7). Форма токов в фазах двига|ORl -/3 cos (о( + 7Г/6 ) ; fOCl V3 sin (o + f/6 )
;j
(2)
HO тогда
lORl
ic A sino . В дальнейшем, на следующих трех интервалах второго полупериода законы изменения фазных токов (4), (6),(7) повторяются. Таким образом, для обеспечения равномерного перемещения результирующего вектора OR с частотрй вращения со ( о tJ t, где t - время) . необходимо в фазах статора на каяздом полупериоде частоты вращения формировать токи на трех угловых интервалах длительностью Г/3 по законам (4), (6), (7). Форма токов в фазах двига/OAI 10В1 2cosW6, теля приведена на фиг.1.
При питании трехфазного моментноТаким образом, для обеспечения го двигателя указанной системой токов равномерного вращения результирующе- результирующий вектор н.с. равномерOR ;
го вектора н.с, UR; величина которого составляет 1,732 величины амплитудного значения, н.с, каждой фазы на интервале (- // /3,0) необходимо изменять фазные точки по закону
i А cos
(d -t- У/6), (4) i А cos (e + Г/6) , i -V3A sin ( + jr/6),
где (,ic мгновенные значения токов j A - заданное амплитудное
значение токов,.
В точке о О векторы ОА, ОВ и. ОС имеют одинаковые значения
lOAl |ОВ1 (ОС V3/2 , (5),
а вектор OR совпадает с осью а. На следующем интервале (О, 3) система ортогональных координат образуется фазами а и с, результирующий вектор
, (геометрическая сумма векто
ров ОА и ОС) служит первой составляю- щей вектора OR , и фазов Ь, образующей вторую составляющую (вектор ОВ), В этом случае точки изменяются следующим образом
1д А cos (о - /6)i . (6) Ц УЗ А sin (d( - /6) ; ic -А cos (о/ - /6) ,
Аналогично для интервала ( F/3,
2 /3) имеют
igf т2 A cos 0 ; (7) i A sin of ;
ic A sino . В дальнейшем, на следующих трех интервалах второго полупериода законы изменения фазных токов (4), (6),(7) повторяются. Таким образом, для обеспечения равномерного перемещения результирующего вектора OR с частотрй вращения со ( о tJ t, где t - время) . необходимо в фазах статора на каяздом полупериоде частоты вращения формировать токи на трех угловых интервалах длительностью Г/3 по законам (4), (6), (7). Форма токов в фазах двига
теля приведена на фиг.1.
HO вращается с частотой, соответствующей частоте вращения ротора двигателя. По отношению к традиционной системе .синусоидальных токов величина результирующего вектора н.с, уве- ;личивается и составляет 1,732 ампли- ;тудного значения н.с. фазной обмот- |ки, в пределах рабочей зоны (линей- ный участок кривой намагничивания |двигателя) соответственно увеличивает |ся и электромагнитный момент, развива |емый двигателем.
I Аналогично описанному можно выделить системы ортогональных координат и определить законы формирования фазных токов для любого числа фаз т, .при . При этом общее число фаз 1двигателя m разбивается на две груп- пы фаз, геометрические суммы векто- |ров н.с. которых на определенных уг- ловых интервалах являются составляю- |1цими результирующего вектора н.с., I например для можно выделить ;варианты, при которых ортогональная :система может образоваться группами из 1 и 14, 2 и 13, 3 и 12 и так да- |лее фаз.
В общем случае, для создания равномерно вращающегося поля в га-фазном двигателе, необходимо создать т-фаз- ную систему токов, сдвинутых по фазе друг относительно друга на угол 2 задать длительность угловых интервалов .,где 1 - номер варианта закона из менения тока,соответствующего варианту образования ортогональной системы координат, который может принимать значения ,4,6,.. , для четного числа фаз и ,2,3,... , т-2/2 для нечетного числа фаз двигателя, в каждой фазе на первом.угловом интервале каждого периода частоты вращения формировать ток по закону А,sir, (cf+с(), где А , А А - заданное значение амплитуды то- кяо1 - V/2, по окончании первого углового интервала на следующих (п-1) угловых интервалах формировать ток по закону i А sin ( d + ) , ((2j-1-P/2), ,3,4,..,n (j - номер углового интервала), Р 2га/1 - общее число интервалов на периоде, может принимать только целые значения, причем п Р+1/2, если m не является кратным 1, и , если m кратное 1, по окончании п-го интервала на следующем (п+1) угловом интерва
ле формировать ток по закону i
(пи J
0
5
0
5
5 405 0
0
А ,G in ( оГ +0 ) , где с of х X (3-2/2п-Р+1) по окончании (п+1)-го углового интервала на последующих (р-п-1) угловых интервалах формировать ток по закону 1 А sin(c/ +
), где с(„ о( (k-n)-2/2n-P-H- .-Р/2+13, , п+3, п+4,...,Р.
I
Например, для возможны два
варианта образования ортогональной системы координат ,2. Для длительность угловых интервалов составляет v ff/5. Тогда - й /Ю.Если, например, , то А ctg /10 3,078А. В этом случае закон изменения тока на первом угловом интервале имеет вид i - 3,078 sin (о/- /7/10). Общее число интервалов на периоде m является кратным 1, поэтому
п Р/2 5. Следовательно, на следующих четырех интервалах ток должен изменяться по законам sin(o(), ij sinc( , sin(o( - /5), i sin( f/75) .Ha шестом угловом интервале закон изменения тока аналогичен закону на первом интервале, а на последующих четырех интервалах законы изменения токов соответствуют законам на интервалах 2,3,4,5, т.е. в данном случае на втором полупериоде законы изменения токов повторяются. Форма фазного тока для этого варианта приведена на фиг.З.
Для второго варианта имеют V 2 Г/5, А, ctg F/5 1,376А, , поскольку в данном случае m не кратно 1, то п Р+1/2 3, на первом интервале i 1,376 Sin ( d- F/5),
2)
на следзтощих двух интервалах i sin (о/- /Г/10), sin (el- W2), на четвертом интервале 1,376 х X sin (d-2ll/5y,Ha последнем интервале (так как р-п-1 1) i sin (с{-3 /10) . Форма тока для этого случая приведена на фиг.4.
Для первого варианта () результирующий вектор составляет 3,078, а для второго ()-2,618 амплитудного значения фазной н.с. По сравнению с традиционной системой гармонических токов (при которой это значение, равно 2,5) величина результирующего вектора Н.С., а следовательно, и электромагнитный момент двигателя увеличивается, что приводит к увеличению быстродействия.
Аналогично определяются законы формирования тока и приращение электC
x 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
| Способ компенсации пульсаций вращающего момента вентильного электродвигателя | 1986 |
|
SU1480045A1 |
| Стенд для измерения угловых моментных характеристик шаговых электродвигателей | 1987 |
|
SU1636813A1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение быстродействия вентильного электродвигателя. Это достигается путем формирования тока в фазах двигателя на равных угловых интервалах по синусоидальным законам в функции углового положения ротора, задания длительности угловых интервалов, формирования тока на каждом угловом интервале с заданной амплитудой и фазой. Увеличиваются действующее значение тока, электромагнитный момент и, следовательно, быстродействие вентильного электродвигателя. 5 ил.
/i
«ж/
N
У «г
W
Фиё.
| Бродовский В.И., Иванов Е.С | |||
| Приводы с частотно-токовым управлением, - М.: Энергия, с.20-37, 133,134 | |||
| Способ управления вентильным электродвигателем с трехсекционной обмоткой якоря | 1977 |
|
SU700930A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
