; л.; fy - gF) ( равно полному обьему счет- илпульсоз 15. Линейный закон измене- кодов на входах счетчика 15
,;д-л зок цифровналогового преобразо- ;. 1.;АП; 11 преобразуется в линейно ;,.:о:цеася постоянное напряжение Ux, с,:; подается из вход X двухкоординат- регистрации 17 и обеспечивает
JV; ; ;, ЛООрДИНЗТЫ X ПрОПОрЦИОНЭЛЬНО -;.,: ;.:: / . ОДгШБр8(ЧЗННО ЛИНеЙНО ИЗощ;/ Йся код с выходов счетчика 15 по;. SfhaЗХОДЫПОСТОЯННЫХ
н ;нз;ощих устройств 12 и 13, где заме- ; некоторым заданным в соответствии :о,зарлтельной записью в их ячейках :ов у и sin у . После цифроаналогового преобразования соответственно в ЦАП 9 и 10 на их выходах формируется аналоговый сигнал заданных функций cosy и sin у. Эти сигналы поступают через пары ключевых элементов 19 на входы управляемых стабилизаторов тока 7, сигнал с выхода каждого из которых поступает на соответствующую фазную обмотку исследуемого ШД. Вместе с изменением фазового состояния результирующего вектора тока ШД I (у) происходит изменение амплитуды его синхронизирующего момента М (y-ff) , который измеряется силометрическим датчиком 3, сигнал с выхода которого поступает на вход Y двухкоординатного блока регистрации 17. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения подвижного элемента шагового двигателя | 1990 |
|
SU1812611A2 |
| Цифровой генератор гармонических колебаний | 1979 |
|
SU873382A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1989 |
|
SU1679595A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1319226A2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Фазовращатель | 1991 |
|
SU1797160A1 |
Изобретение относится к электротехнике, в частности к устройствам экспериментального исследования характеристик шаговых электродвигателей (ШД), и может быть использовано в процессе испытаний, технической приемки и паспортизации ШД в заводских и лабораторных условиях. Цель изобретения - расширение функциональных возможностей за счет обеспечения измерения статического и динамического моментов Сигнал fy формируется программируемым генератором импульсов 14 в виде ограниченной последовательности импульсов постоянной частоты. Число импульсов последовательности, приравненное аргу
..-. ..,;...; ;..- от:;сс:.ттг.;,: ,х эле; топтехн1/
.... ., -..-. .. -.... ;.. уггройствсГ Л зкеперимен,....-..,...,, о . Х..ианмя характеристик
..:. i:.:..::.: х - лз трод змгателей (ШД), и может
:- :.-. ...,:.:.. ;.-.з: оано в прси.ессе испытаний,
.... : ;;:;;е.::-и;й приемки к паспортизации ШД
o-i.j.JCKr/ix и яаборатормых условиях.
Целью озооретения хзляется расшире- .-. ...; функциональных воз..-юж ;остей за счет . ..,:;, -is1 Ј;-;/ я Иомерения статического и д«- :. ..:.; :-sci i ;i o моментов.
. : - .). 1 1 ;;:г;:1ставлена З.мо;;-схег . : СТУН. :,: , ЧГЛОВЫХ fv-ОМЯНТНЫХ Хп
Сганл , : ;A3;j);xviT ос:юзанмэ 1 с злемен- для жесткого закрепления (не показаны) статспа 2 исследуемого ШД, .. :чс эгп:лческ:лм п.-ггчмх 3 для установки на I:GTCOS : ,йУН:./;ого LiJ.n, само 0омозя .-....;::. ,;- :..:.- о с з -:хоа -;ым вгл л б, блоки ; - . .. .,. ::- -. ( юследу.1. : ::.:. . Т .:.. : -. -. I- . :.: :; -2 Л :,;; ЛрЭВ/Шб
,;ыа запомикающяэ устройства (ПЗУ), поогпзг 1 у пу8мый генесэтор 14 импульсов, ;;чет-;::;: 1b .ibCu3, дешифратор 16. двух- я.:..С Пи:.-1натный блок 17 регистрации, источ- ,; i;:i л ос го:: i-; н п го тока, парь; аналоговых ;снш ;;-:;;: .. :,j:Oi.-ieHT03 19 по числу фаз иссле0
5
Стенд работает следующим образом.
В исходном состоянии, за которое принимается состояние, предшествующее моменту поступления от программируемого генератора 14 импульсных команд, выполняются некоторые предварительные оперз- ции. Проводятся механические регулировочные работы по исключению механических люфтов и зазоров. Осуществляется сброс счетчика 15 в состояние О. Подвижный элемент двухкоординатного блока 17 регистрации (перо графопостроителя., луч осциллографа) выводится в положение, обеспечивающее запись процесса, имеющего форму, подобную синусоиде за период ее изменения.
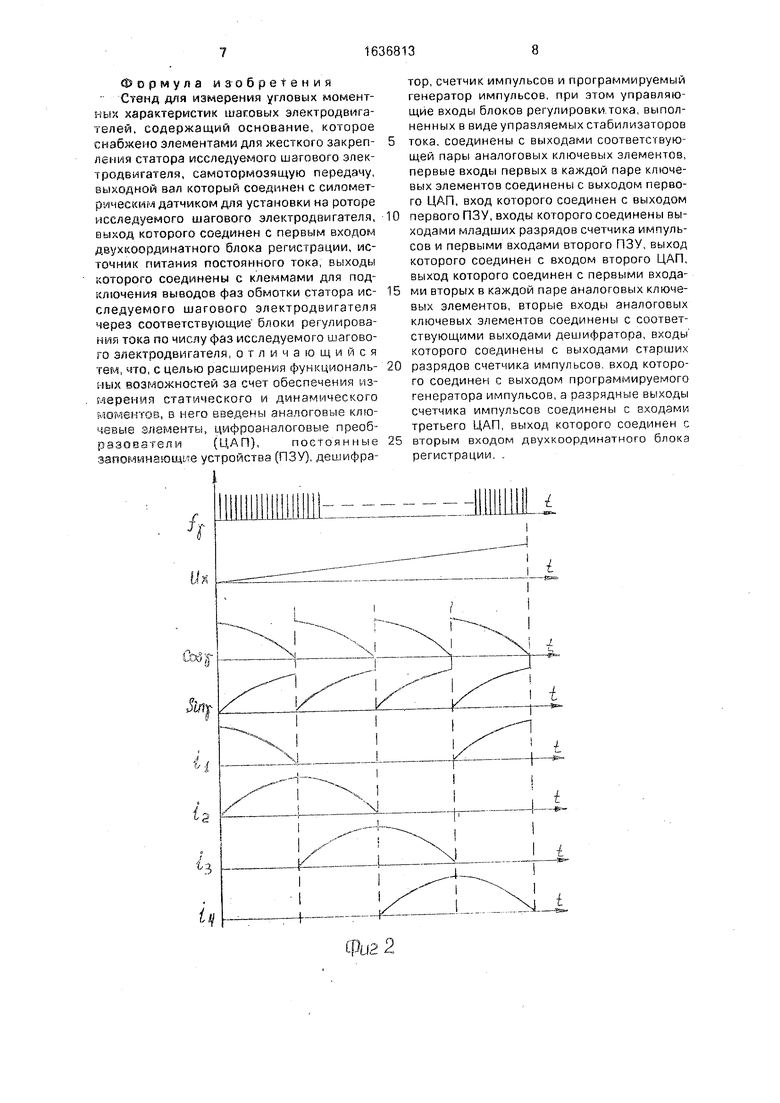
Функционирование стенда с момента пуска рассмотрим для режима измерения динамического момента 4-фазного шагового электродвигателя в условиях 6 const, у маг. Сигнал fy вырабатывается программируемым генератором 14 импульсов в виде ограниченной последовательности импульсов (фиг.2) постоянной частоты. Число .импульсов1 последовательности, приравненное аргументу М () на интервале. О -2л, равно полному объему счетчика 15. Линейный закон изменения кодов на входах счетчика 15 посредством циф- роанэлогового преобразования в ЦАП 11 преобразуется в линейно изменяющееся постоянное напряжение (фиг.2, Ux). Это напряжение, поданное на вход X двухкоординатного блока 17, регистрации, обеспечивает развертку указанной координаты пропорционально изменению у . Одновременно линейно изменяющийся код с выходов счетчика 15 поступает на входы
ПЗУ 12 и 13, где заменяется некоторым заданным в соответствии с предварительной записью в ячейках памяти ПЗУ 12 и 13, например cosy ПЗУ 12 и sin у в ПЗУ 13. После цифроаналогового преобразования в ЦАП 9 и 10 не их выходах формируется аналоговый сигнал заданных функций cos у и sin у . С целью экономии объема ПЗУ функции cos у и sin у определяются на интервале 0 -лУ2. Для этого поразрядные входы ПЗУ соединены с группой младших разрядов счетчика 15, имеющей на два разряда меньше полного объема счетчика. Таким образом, за период полного изменения у 0 - 2 л аналоговые сигналы указанных функций формируются четыре раза (фиг.2, кривые cos } и sin у) и поступают нз первые входы ключевых элементов пар аналоговых ключевых элементов 19.
Код группы старших разрядов счетчика 15 после дешифрирования в дешифраторе 18 в виде разрешающего сигнала на одном из его выходов поступает на вторые входы ключевых элементов 19 пар, обеспечивая прохождение аналоговых сигналов функций cos у и sin у на входы управляемых стабилизаторов 7 тока.
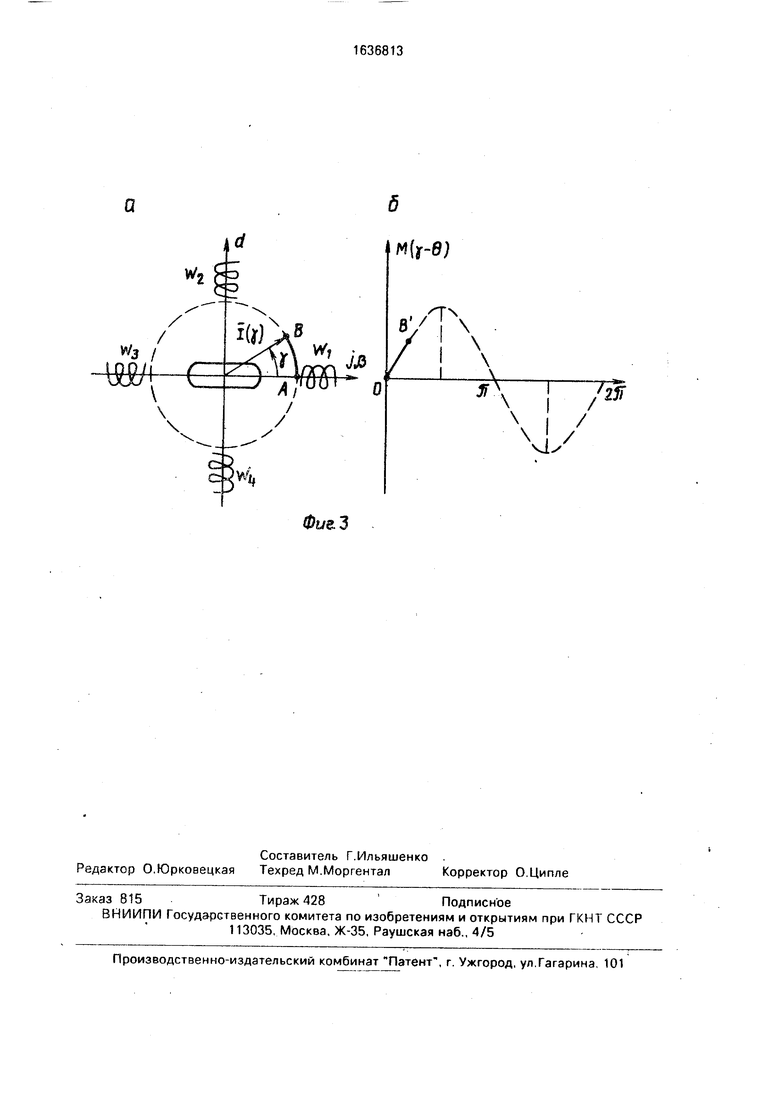
Так, например, е исходном состоянии разрешающий сигнал на первом выходе дешифратора 16 обеспечивает прохождение на вход управляемого стабилизатора 7 тока обмотки Wi напряжения, пропорционального значению функции yi cos у . где у --0, м на вход стабилизатора 7 обмотки Wa нэп ряжения ..пропорционального значению функции у2 - sin у, где у 0. Это обеспечивает в исходном состоянии номинальное значение тока И - Ном в фазе Wi и обесточенное состояние Л/2, Л/з и Л/4, т.е. 2 з Ц 0. На фиг.З это электрическое состояние исследуемого ШД представлено в виде результирующего вектора Т(у) в координатах а, / (точка А).
По мере заполнения счетчика 15 от момента пуска программируемого генератора
14ток в обмотке Wi начинает изменяться по закону И IHOM cos у (фиг.2, кривая и), в Л/2 J по закону l2 IHOM sin у. Этому процессу соответствует поворот результирующего вектора l(y) в направлении против часовой стрелки (точка В на фиг.З). В момент заполнения группы младших разрядов счетчика
15И Oh 12 ном. Первый цикл закончен. Этот факт фиксируется новым положением вектора 1(у), новым кодом в группе старших разрядов счетчика 15 и появлением разрешения на втором выходе дешифратора 16, по которому сигнал шины (cos у) коммутируется на вход управляемого стабилизатора 7
обмотки Л/2, а сигнал шины (sin у) - на вход управляемого стабилизатору 7 обмотки Л/з. Результирующий вектор l(y) продолжает движение, но уже в квадранте II(a, j/3).
Вместе с изменением фазового состояния результирующего вектора l(y) происходит изменение амплитуды синхронизирующего момента. Этот факт иллюстрируется кривой М (y - fy на фиг.З. Подобная картина фикси0 руется блоком 17 регистрации, на вход Y которого поступает сигнал амплитудного значения момента от силометрического датчика 3.
К моменту заполнения счетчика 15 ре5 зультирующий вектор 1(у) совершит полный оборот, а характеристика синхронизирующего момента - период своего изменения, Конец программы соответствует исходному состоянию устройства. Синусоидальный за0 кон изменения токов в фазах обеспечивает круговой годограф результирующего вектора тока l(y). Известно, что в результате калибровки двигателя годограф l(y) может отличаться от кругового и иметь произволь5 ную форму. Стенд позволяет измерять угловую моментную характеристику при любых заданных законах изменения фазных токов. Это обеспечивается установкой в гнезда ПЗУ 12 и 13 новых ячеек с предварительно
0 записанной информацией о форме кривых токов в фазах ШД.
Изменение частоты программируемого генератора 14 изменяет скорость поворота вектора 1(у). Это соответствует фактическо5 му изменению скорости подвижного элемента, а для стенда - способности измерять М (у-$) в диапазоне частот управления. При этом чрезвычайно важным становится фиксирование деформации формы характе0 ристики М(у -О).
При остановке программы импульсная последовательность -прерывается. Счетчик 15 фиксирует это состояние программы, которому соответствует некоторое токовое
5 состояние фаз ШД. положение результирующего вектора 1(у) и точка на характеристике М(у-$). Программа генерирования импульсов fy может быть составлена таким образом, чтобы исследователь мог вызвать
на экран блока 17 регистрации заранее заданную точку или группу точек, образующих отрезок характеристики М(). Это дает возможность в случае использования средств вычислительной техники расши5
рить сервисную часть программы исследования и автоматизировать ее процесс.
Таким образом, изобретение обеспечивает расширение функциональных возможностей.
Формула изобретения Стенд для измерения угловых момеит- ных характеристик шаговых электродвигателем, содержащий основание, которое снабжено элементами для жесткого закрепления статора исследуемого шагового электродвигателя, самотормозящую передачу, выходной вал который соединен с силомет- рмческим датчиком для установки на роторе исследуемого шагового электродвигателя, выход которого соединен с первым входом двух координат но го блока регистрации, источник питания постоянного тока, выходы которого соединены с клеммами для подключения выводов фаз обмотки статора исследуемого шагового электродвигателя через соответствующие блоки регулирования тока по числу фаз исследуемого шагового электродвигателя, отличающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения измерения статического и динамического моментов, в него введены аналоговые ключевые элементы, цифроаналоговые преобразователи (ЦАП), постоянные запоминающее устройства (ПЗУ), дешифраЦ
Фиг 2
тор, счетчик импульсов и программируемый генератор импульсов, при этом управляющие входы блоков регулировки.тока, выполненных в виде управляемых стабилизаторов
тока, соединены с выходами соответствующей пары аналоговых ключевых элементов, первые входы первых в каждой паре ключевых элементов соединены с выходом первого ЦАП, вход которого соединен с выходом
первого ПЗУ, входы которого соединены выходами младших разрядов счетчика импульсов и первыми входами второго ПЗУ, выход которого соединен с входом второго ЦАП, выход которого соединен с первыми входами вторых в каждой паре аналоговых ключевых элементов, вторые входы аналоговых ключевых элементов соединены с соответствующими выходами дешифратора, входы которого соединены с выходами старших
разрядов счетчика импульсов, вход которого соединен с выходом программируемого генератора импульсов, а разрядные выходы счетчика импульсов соединены с входами третьего ЦАП, выход которого соединен с
вторым входом двухкоординатного блока регистрации. .
Фие.3
| Способ измерения угловой моментной характеристики шагового электродвигателя | 1984 |
|
SU1191848A1 |
| М.Г.Чиликина М Энергия, 1971, с | |||
| Способ получения волокон из листьев агав, юккацей и проч. | 1924 |
|
SU578A1 |
